 48V机器人关节控制器的拆解分析
48V机器人关节控制器的拆解分析

以下文章来源于车规芯片爱好者,作者小陈同学
最近机器人非常火,正好关节控制器和底盘执行器例如转向控制等比较类似,拆解了一款,简单分析了一下。
果然非常类似,3相6桥驱BLDC Pre Driver,甚至用上了高端EPS用的5*6mm封装的双面散热MOSFET,看起来关节也是散热的重要部件。此前机器人马拉松要散热就说明了这一点。
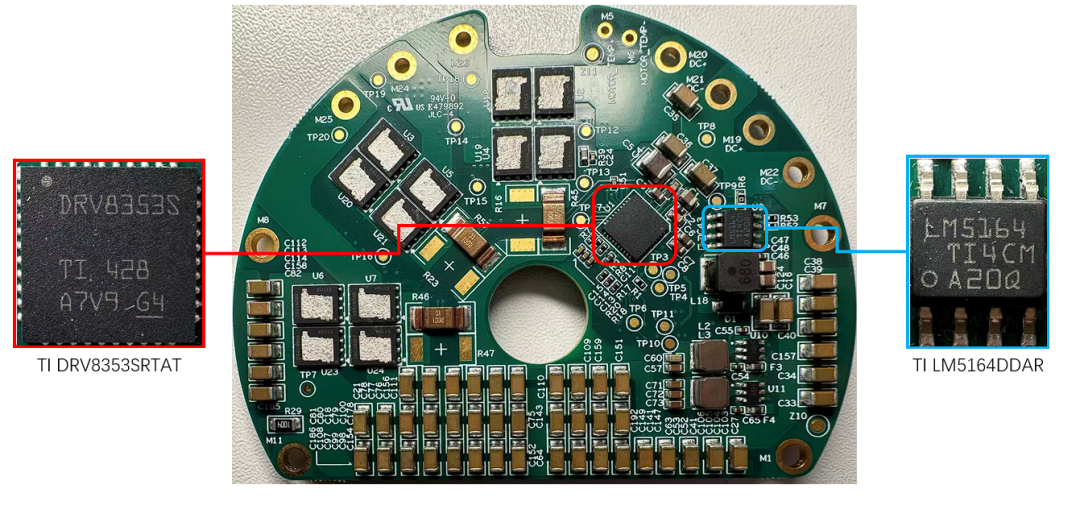
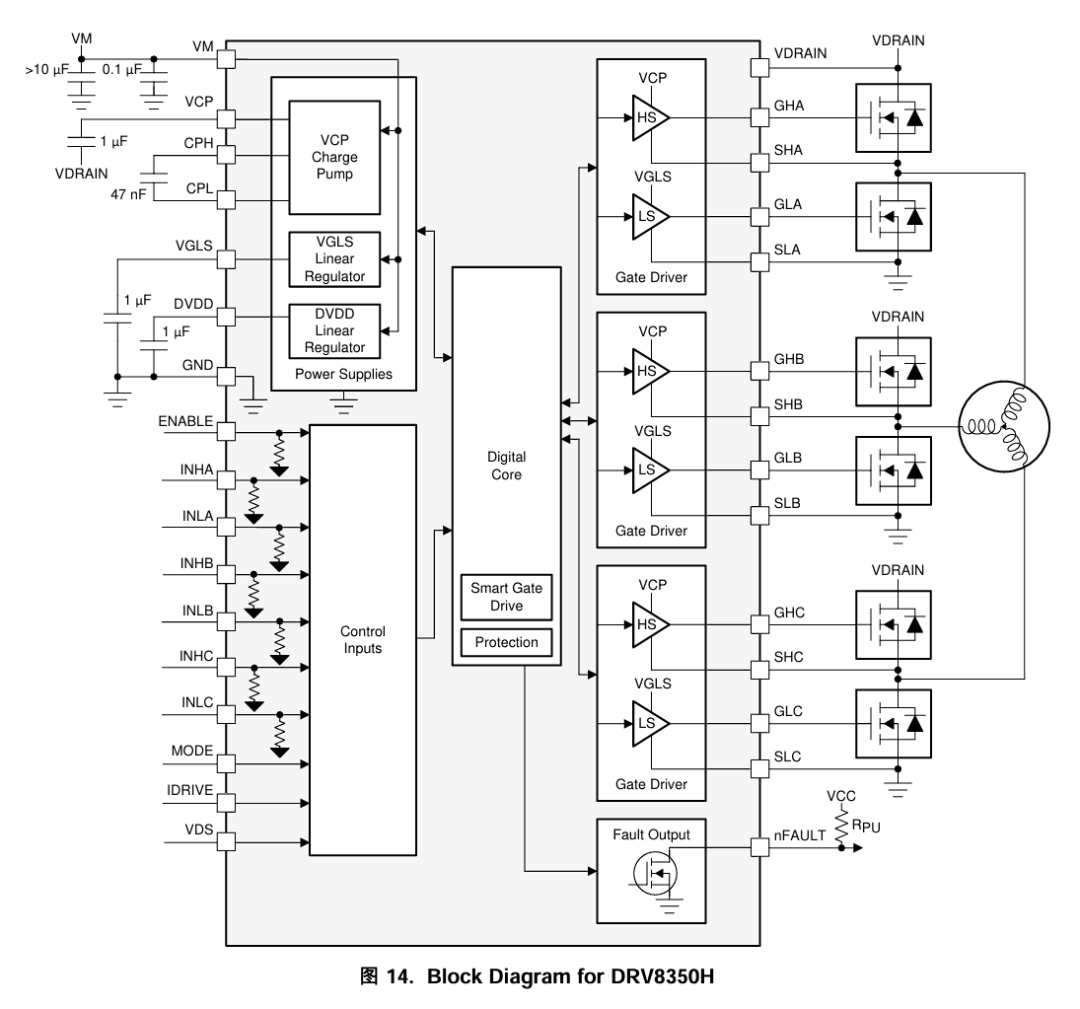
驱动部分采用了TI德州仪器的DRV8353预驱动器,支持最高100V工作,适用于三相无刷直流 (BLDC) 电机 应用标准。这些 应用 包括 BLDC 电机的场定向控制 (FOC)、正弦电流控制和梯形电流控制。该器件型号提供了可选的集成式分流放大器以支持不同的电机控制方案,还提供了降压稳压器,以为栅极驱动器或外部控制器供电。
DRV835x 通过采用智能栅极驱动 (SGD) 架构减少了 MOSFET 压摆率控制和保护电路通常所需要的外部组件数量。SGD 架构还可优化死区时间以防止击穿问题,在通过 MOSFET 压摆率控制技术降低电磁干扰 (EMI) 方面带来了灵活性,并可通过 VGS 监控器防止栅极短路问题。强大的栅极下拉电路有助于防止不必要的 dV/dt 寄生栅极开启事件。
该系列器件支持各种 PWM 控制模式(6x、3x、1x 和独立模式),可简化与外部控制器的连接。这些模式可减少电机驱动器 PWM 控制信号所需的控制器输出数量。该系列器件还包括 1x PWM 模式,因此可通过内部阻塞换向表轻松对 BLDC 电机进行传感器式梯形控制。
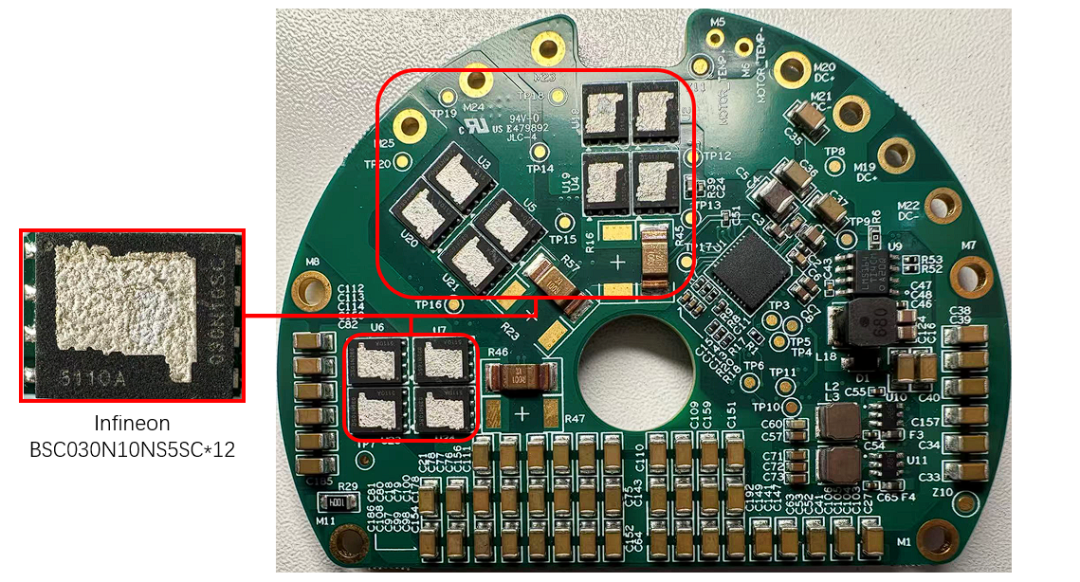
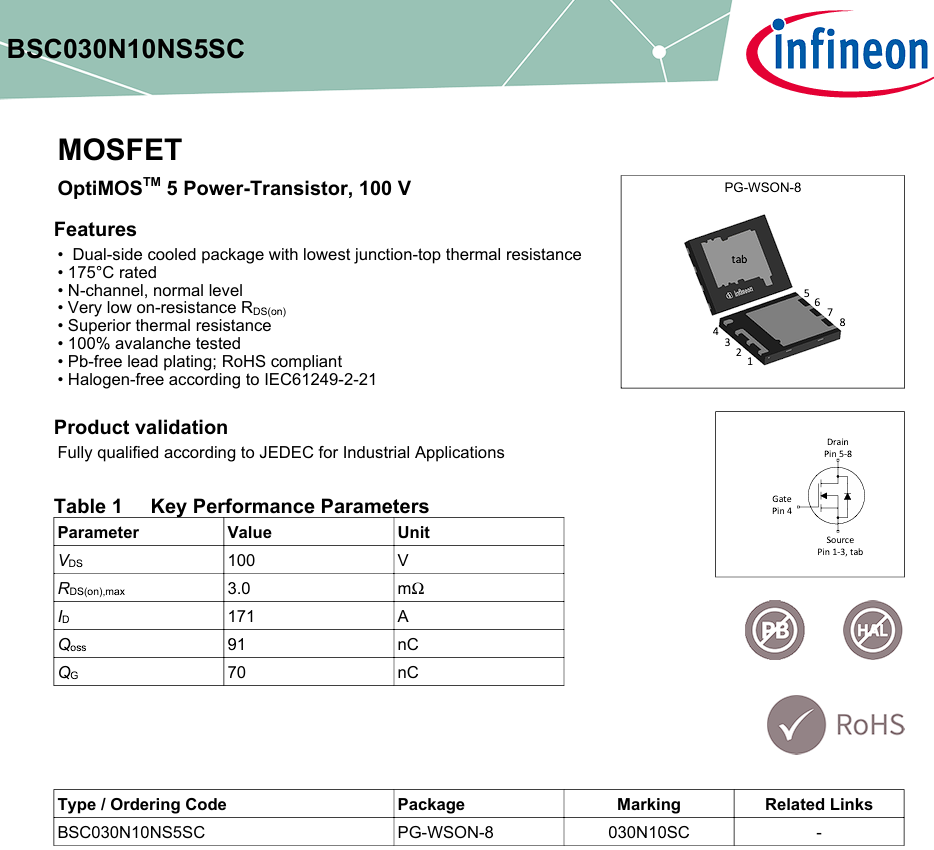
MOSFET部分采用12个BSC030N10NS5SC,一种可能是2并管。该器件为100V,3mΩ最大阻抗的双面散热MOSFET,比较适合PCB面积紧凑,散热要求较高的场景。
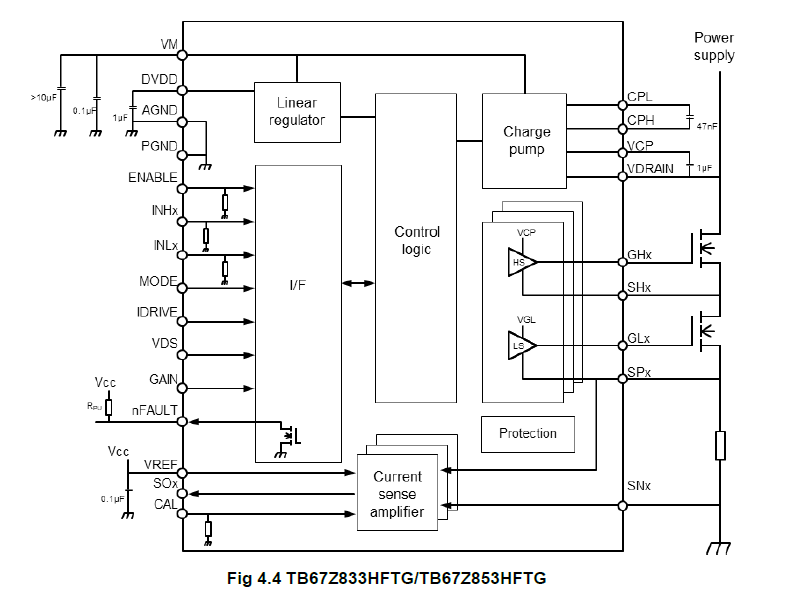
下面Toshiba马达驱动的类似产品,同样也非常适合机器人应用
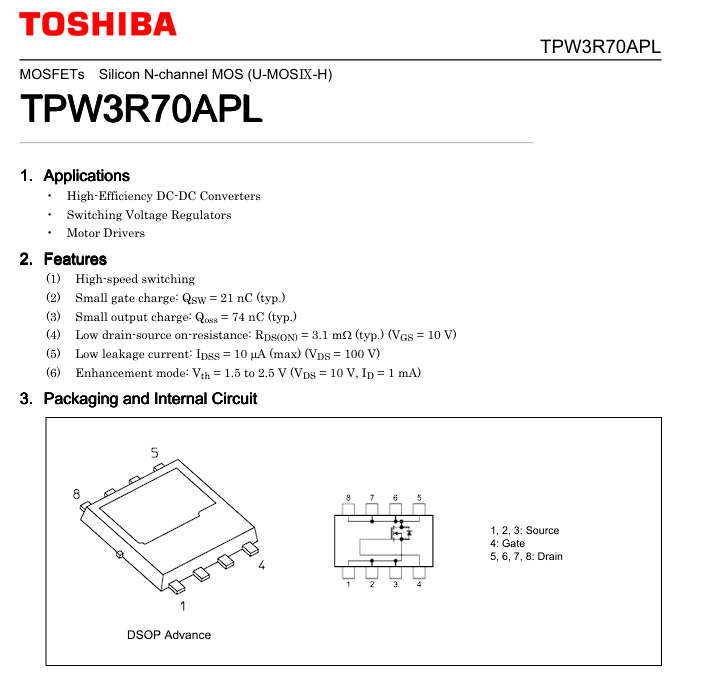
下面Toshiba的MOSFET产品类似,也是双面散热。TPW3R70APL;
-
MOSFET
+关注
关注
151文章
10834浏览量
235019 -
控制器
+关注
关注
114文章
17886浏览量
195223 -
机器人
+关注
关注
213文章
31494浏览量
223762 -
BLDC
+关注
关注
220文章
951浏览量
100653
原文标题:48V机器人关节控制器
文章出处:【微信号:芯长征科技,微信公众号:芯长征科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
HCTL-2020 解码器及其在多关节机器人运动控制中的应用
工业机器人的工作原理
工业机器人的末端关节旋转该精确控制?
基于DSP仿人机器人关节控制器设计
基于DSP和FPGA的四关节实验室机器人控制器的研制





评论