 为什么步进电机的力矩会随转速的升高而下降
为什么步进电机的力矩会随转速的升高而下降

步进电机是一种将电脉冲信号转换为角位移或线位移的开环控制元件,其工作原理基于电磁感应和磁阻变化。当步进驱动器接收到一个脉冲信号时,它就会驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),其旋转以固定的角度一步一步运行。然而,在实际应用中,步进电机的输出力矩会随着转速的升高而下降,这一现象主要由以下几个方面的原因造成。
首先,步进电机的力矩下降与电机的电感特性密切相关。步进电机的绕组具有电感,而电感会阻碍电流的变化。当电机转速较低时,驱动电路有足够的时间为绕组提供电流,使电流能够达到额定值,从而产生足够的力矩。但随着转速的升高,脉冲频率增加,每个脉冲的持续时间变短,电流在绕组中无法充分建立,导致实际电流值低于额定值。根据安培定律,电磁力矩与电流成正比,因此电流的下降直接导致输出力矩的减小。这种现象被称为“电流滞后效应”,是步进电机高速运行时力矩下降的主要原因之一。
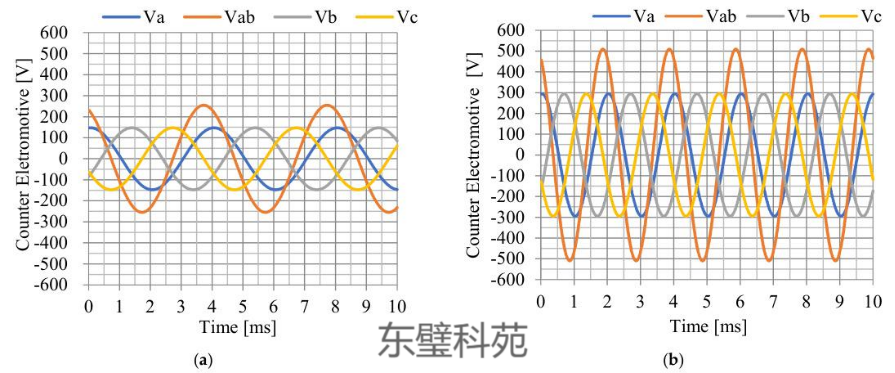
其次,反电动势的影响也不容忽视。步进电机在旋转时,绕组切割磁力线会产生反电动势(Back EMF),其大小与转速成正比。反电动势的方向与驱动电压相反,会抵消部分驱动电压,从而降低绕组的有效电压。当转速升高时,反电动势增大,绕组的有效电压进一步降低,导致电流减小,力矩也随之下降。特别是在高速运行时,反电动势可能接近甚至超过驱动电压,使得电流无法有效建立,力矩急剧下降。
此外,步进电机的机械损耗和铁损也会随着转速的升高而增加。机械损耗包括轴承摩擦、风阻等,这些损耗会消耗部分输入能量,降低电机的有效输出力矩。铁损则是由电机铁芯中的涡流和磁滞效应引起的,随着频率的增加,铁损会显著增大,进一步削弱电机的输出能力。这些损耗在低速时影响较小,但在高速运行时成为不可忽视的因素。
步进电机的驱动方式也对力矩-转速特性有重要影响。常见的驱动方式包括单极性驱动、双极性驱动、恒压驱动和恒流驱动等。恒流驱动通常能够在一定程度上缓解高速时的力矩下降问题,因为它通过调节驱动电压来维持绕组电流的恒定。然而,即使采用恒流驱动,由于电感和反电动势的存在,电流在高频下仍然难以完全达到设定值,力矩依然会随转速升高而下降。此外,细分驱动技术虽然可以提高低速时的运行平稳性,但在高速时也可能因控制算法的延迟而导致力矩下降。
另一个关键因素是电机的设计参数。步进电机的力矩-转速特性与其电气时间常数和机械时间常数密切相关。电气时间常数由绕组的电感和电阻决定,反映了电流建立的快慢;机械时间常数则与转子的惯性和阻尼特性有关,决定了电机响应的速度。如果电气时间常数较大,电流建立较慢,电机在高速时的力矩下降会更明显。因此,设计低电感、低电阻的绕组可以改善高速性能,但这也可能牺牲低速时的力矩或增加成本。
在实际应用中,为了缓解步进电机高速力矩下降的问题,可以采取多种措施。例如,选择电感较小的电机型号,因为低电感电机能够更快地建立电流;采用更高的驱动电压,以克服反电动势的影响;优化驱动电路的电流控制算法,确保在高频下仍能提供足够的电流;或者使用闭环控制技术,通过反馈信号实时调整驱动参数,以维持稳定的力矩输出。此外,对于高速应用,还可以考虑使用伺服电机或其他更适合高速运行的电机类型。
从能量转换的角度来看,步进电机的高速力矩下降也反映了能量转换效率的变化。在低速时,电能能够较高效地转换为机械能;而在高速时,更多的能量被消耗在克服电感、反电动势和各类损耗上,导致有效输出力矩降低。因此,步进电机的力矩-转速曲线通常呈现单调下降的趋势,这也是其工作特性的一大限制。
总结来说,步进电机力矩随转速升高而下降的现象是多种因素共同作用的结果,包括电感的电流滞后效应、反电动势的抵消作用、机械损耗和铁损的增加、驱动方式的限制以及电机设计参数的约束。理解这些原因有助于在实际应用中更好地选择电机型号、优化驱动方案,并在必要时采用替代方案以满足高速高力矩的需求。尽管步进电机在高速性能上存在局限性,但其结构简单、控制方便、成本低廉的特点使其在众多低速高精度场合中仍具有不可替代的优势。
-
步进电机
+关注
关注
153文章
3270浏览量
152732
发布评论请先 登录
步进电机有哪些相数?如何选择?
步进电机发热问题及对策
力矩电机式调节仪表控制方式

力矩电机在机器人身上发挥什么作用?

步进电机运动电流与保持电流的意义与用法

单片机怎么控制步进电机的
无线传感器网络在步进电机运行状态监测中的应用
嵌入式力矩电机的设计方法研究
步进电机在高速运行时反电动势波形与其动态响应变化
如何减少步进电机的发热?
为什么直流力矩电动机转矩大、转速低?




评论