 【干货分享】基于瑞萨RA4M2-SENSOR开发板,实现便携式 GPS 定位器
【干货分享】基于瑞萨RA4M2-SENSOR开发板,实现便携式 GPS 定位器

本文介绍了 RA4M2-SENSOR 通过 IIC 协议实现 OLED 显示,并结合串口通信读取 GPS 模块数据,实现便携式 GPS 定位器的项目设计。
https://bbs.elecfans.com/jishu_2500317_1_1.html
RA4M2-SENSOR 是一款基于 RA4M2 系列微控制器的评估套件,支持 TrustZone 技术和片内安全加密引擎(SCE),提供硬件级安全保护,确保敏感数据安全。RA4M2 MCU 采用 40nm 工艺,具有出色的低功耗性能(CoreMark功耗低至 81µA/MHz)。
目录
一、硬件连接:GPS 模块和 OLED 分别与开发板的 UART0 和 SCI2-IIC 对应引脚连接;
二、工程创建:使用 e^2^ studio 软件实现空白工程创建;
三、工程配置:包括 GPIO 引脚、时钟树、UART堆栈、IIC 堆栈等配置;
四、工程代码:包括流程图、主程序代码、 GPS 解析代码和 OLED 驱动代码;
五、效果演示:OLED 显示实时卫星定位经纬度信息、串口打印读取到的 GPS 原始数据和解析数据。
一、硬件连接
1.OLED 与开发板连接方式如下
| OLED | RA4M2 | Note |
|---|---|---|
| SDA | SDA2 (P302) | Serial data |
| SCL | SCL2 (P301) | Serial clock |
| VCC | 3V3 | Power |
| GND | GND | Ground |
2. GPS 模块与开发板连接方式如下
| GPS module | RA4M2 | Note |
|---|---|---|
| RXD | TXD0 (P101) | Receive data |
| TXD | RXD0 (P100) | Transmit data |
| VCC | 3V3 | Power |
| GND | GND | Ground |
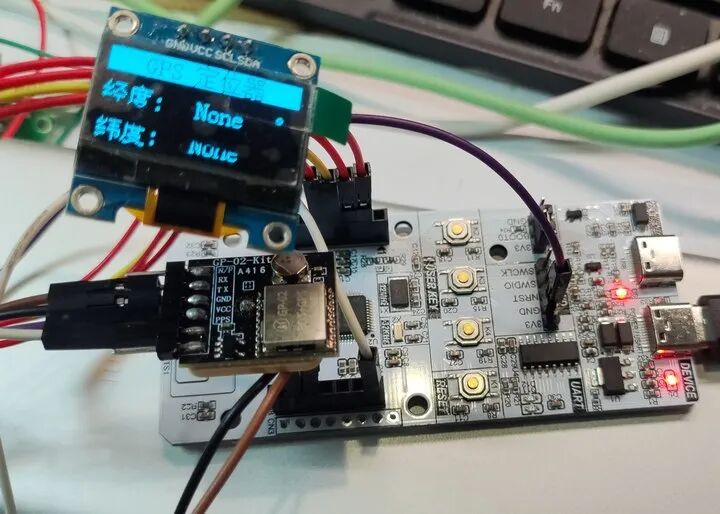
3.实物连接图如下
二、工程创建
打开e² studio软件;
依次点击文件-新建-瑞萨 C/C++ 项目-Renesas RA;
依次进行工程命名,路径设置,FSP版本,目标开发板选择,Device 选择R7FA4M2AD3CFL,工具链选择GNU ARM Embedded,调试器选择J-Link,完成工程创建 ;
三、工程配置
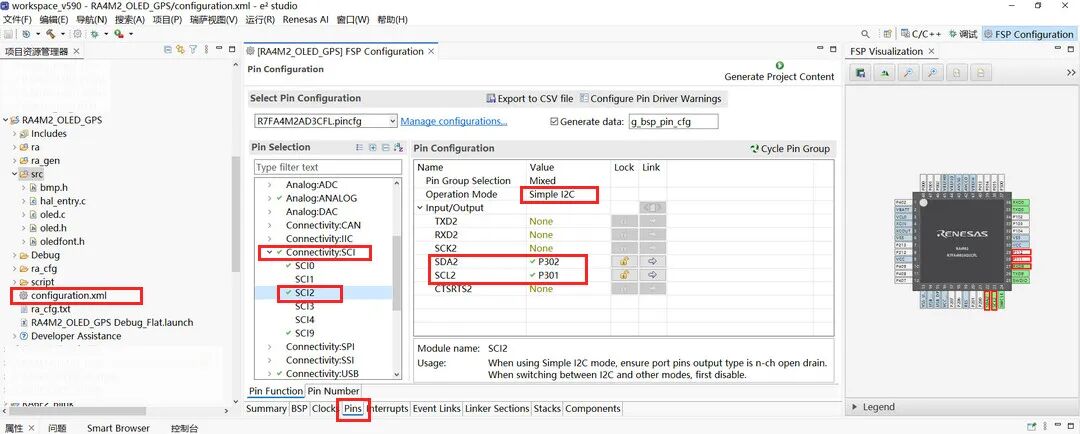
GPIO 引脚
进入 FSP 配置界面,打开 Pins 标签页,根据原理图或开发板丝印,将 P109 和 P110 引脚分别配置为 TXD9 和 RXD9 串口模式;
同理,将 P101 和 P100 引脚分别配置为 TXD0 和 RXD0 串口模式;
将 SCI2 配置为 Simple I2C 模式,引脚定义为 P302 和 P301 分别对应 SDA2 和 SCL2 ;
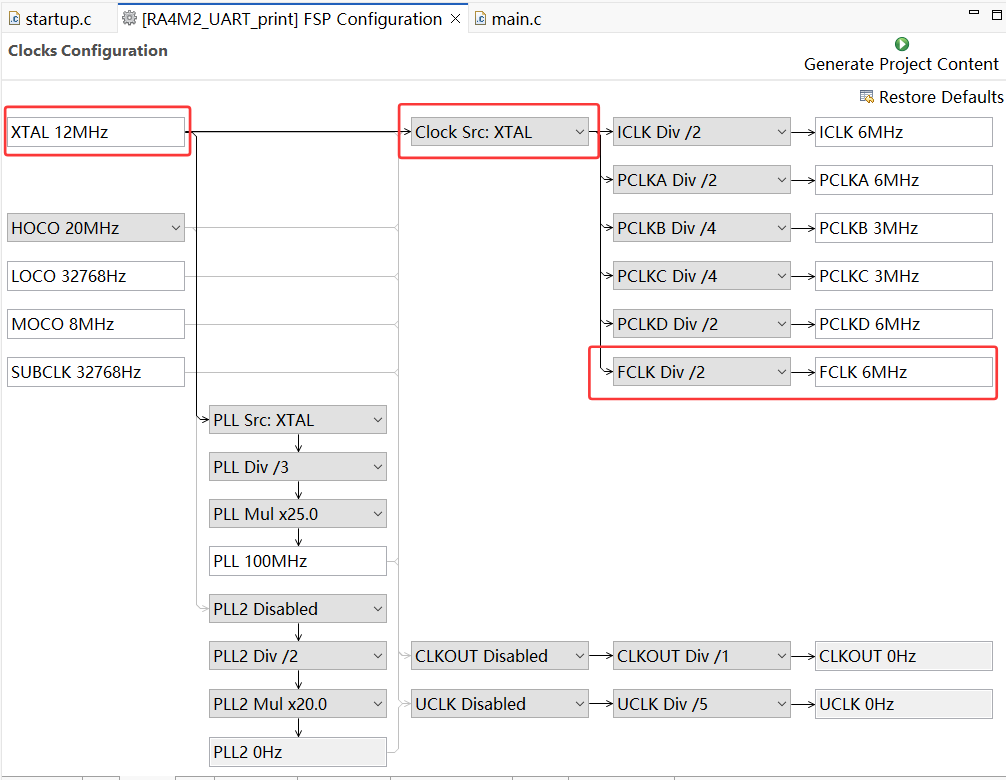
时钟树
进入Clock时钟标签页,将XTAL外部高速晶振修改为12MHz,FCLK Div设置为 2 分频;
UART 堆栈
新建串口通信堆栈New Stack-Connectivity-UART (r_sci_uart);
串口属性配置,General 标签下的 Channel 改为 9,名称改为g_uart9,中断回调函数命名为user_uart9_callback;
再次新建串口通信堆栈New Stack-Connectivity-UART (r_sci_uart);
串口属性配置,General 标签下的 Channel 改为 0,名称改为g_uart0,中断回调函数命名为user_uart0_callback,注意波特率需要修改为 9600 并与 GPS 模块匹配;
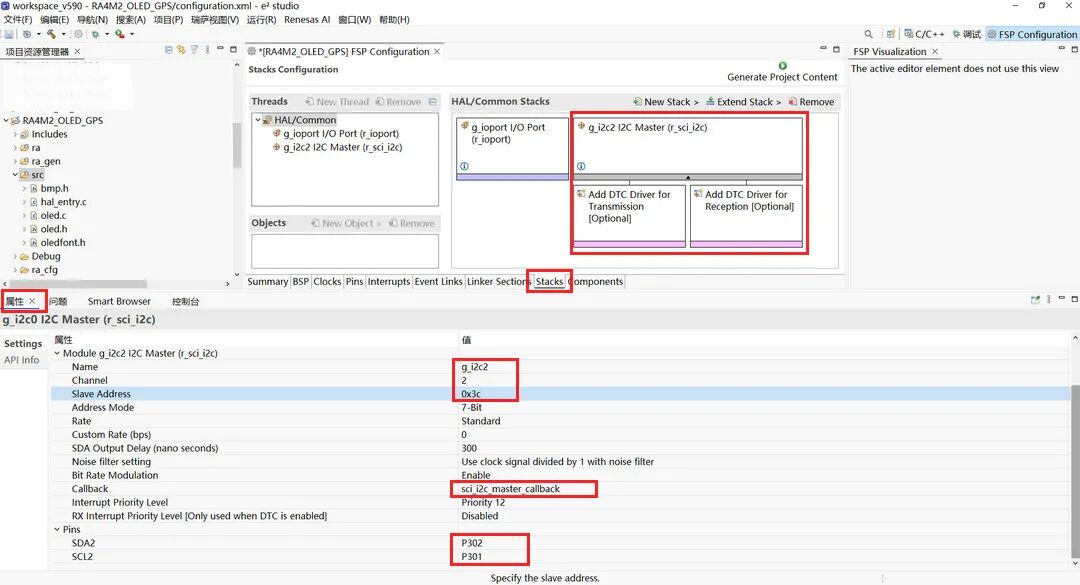
IIC 堆栈
新建 IIC 通信堆栈
Stacks-New Stack-Connectivity-I2C Master (r_sci_i2c)
选中 iic 堆栈方框,打开属性标签,配置 IIC 参数;
属性设置:属性-Module g_i2c_master0 I2C Master (r_iic_master);
Slave Address设置为0x3C;
回调函数默认为sci_i2c_master_callback;
点击Generate Project Content按钮,生成工程代码。
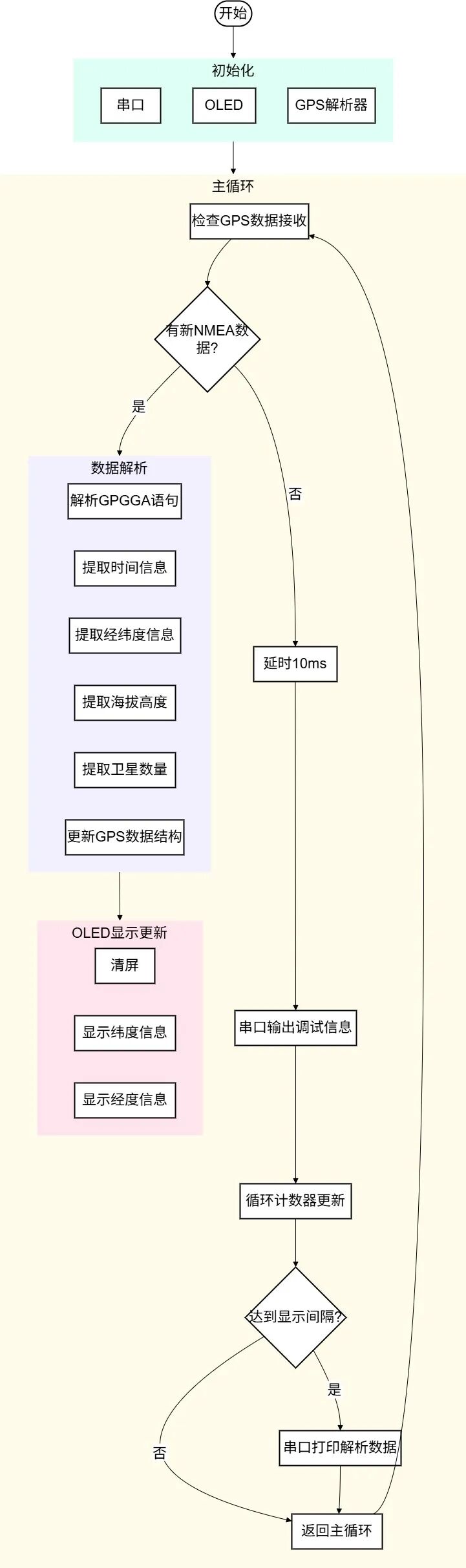
流程图
四、工程代码
在.../src目录下新建源文件gps_parser.c和头文件gps_parser.h用于配置 GPS 相关解析函数。
1. hal_entry.c
#include"hal_data.h"#include"oled.h"#include"bmp.h"#include"gps_parser.h"#include#includeFSP_CPP_HEADERvoidR_BSP_WarmStart(bsp_warm_start_event_tevent);FSP_CPP_FOOTERfsp_err_terr = FSP_SUCCESS;volatilebooluart_send_complete_flag =false;voiduser_uart9_callback(uart_callback_args_t* p_args){ if(p_args->event == UART_EVENT_TX_COMPLETE) { uart_send_complete_flag =true; }}/*------------- 串口重定向 -------------*/#ifdef__GNUC__ #definePUTCHAR_PROTOTYPE int __io_putchar(int ch)#else#endifPUTCHAR_PROTOTYPE{ err =R_SCI_UART_Write(&g_uart9_ctrl, (uint8_t*)&ch,1); if(FSP_SUCCESS != err) __BKPT(); while(uart_send_complete_flag ==false){} uart_send_complete_flag =false; returnch;}int_write(intfd,char*pBuffer,intsize){ for(inti=0;i { __io_putchar(*pBuffer++); } returnsize;}// 全局变量volatileuint8_tgps_rx_buffer[256];volatileuint16_tgps_rx_index =0;volatileboolgps_line_ready =false;gps_data_tcurrent_gps_data;// SCI0回调函数(GPS数据接收)voiduser_uart0_callback(uart_callback_args_t* p_args){ if(p_args->event == UART_EVENT_RX_CHAR) { uint8_trx_char = (uint8_t)p_args->data; // 存储接收到的字符 if(gps_rx_index < (sizeof(gps_rx_buffer) - 1)) { gps_rx_buffer[gps_rx_index++] = rx_char; // 检查是否收到换行符(一行结束) if (rx_char == '\n') { gps_rx_buffer[gps_rx_index] = '\0'; gps_line_ready = true; gps_rx_index = 0; } } else { // 缓冲区溢出,重置 gps_rx_index = 0; } }}// 初始化函数void init_system(void){ fsp_err_t err; printf("=== RA4M2 GPS Receiver ===\r\n"); printf("Initializing system...\r\n"); // 初始化GPS解析器 gps_parser_init(); // 打开SCI9(printf输出) err = R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); if (FSP_SUCCESS != err) { while(1); // 初始化失败 } printf("SCI9 (printf) initialized at 115200 baud\r\n"); // 打开SCI0(GPS数据接收) err = R_SCI_UART_Open(&g_uart0_ctrl, &g_uart0_cfg); if (FSP_SUCCESS != err) { printf("Error: Failed to initialize SCI0 for GPS\r\n"); while(1); } printf("SCI0 (GPS) initialized at 9600 baud\r\n"); printf("Waiting for GPS data...\r\n\r\n");}// 处理GPS数据void process_gps_data(void){ if (gps_line_ready) { // 禁用中断以防数据被修改 __disable_irq(); // 复制数据到本地缓冲区 char nmea_line[256]; strncpy(nmea_line, (char *)gps_rx_buffer, sizeof(nmea_line)); nmea_line[sizeof(nmea_line) - 1] = '\0'; gps_line_ready = false; // 使能中断 __enable_irq(); // 打印原始NMEA数据 printf("RAW: %s", nmea_line); // 解析GPGGA语句 if (strstr(nmea_line, "$GPGGA")) { if (parse_gpgga(nmea_line, ¤t_gps_data)) { print_gps_data(¤t_gps_data); } else { printf("Failed to parse GPGGA data\r\n"); } } // 可以添加其他NMEA语句的解析 else if (strstr(nmea_line, "$GPRMC")) { gps_time_t rmc_time; if (parse_gprmc(nmea_line, ¤t_gps_data, &rmc_time)) { // 如果GPGGA没有提供时间,使用GPRMC的时间 if (current_gps_data.time.hour == 0 && current_gps_data.time.minute == 0 && current_gps_data.time.second == 0) { current_gps_data.time = rmc_time; } } //printf("GPRMC sentence received\r\n"); } printf("\r\n"); }}// 打印解析后的GPS数据void print_parsed_gps_data(void){ static uint32_t last_print_time = 0; static uint32_t current_time = 0; current_time++; // 每2秒打印一次解析结果 if (current_time - last_print_time >=200) { last_print_time = current_time; printf("\r\n=== PARSED GPS DATA ===\r\n"); if(current_gps_data.is_valid) { // 打印时间信息 print_gps_time(¤t_gps_data.time); printf("\r\n"); // 打印位置信息 printf("Latitude: %.6f°\r\n", current_gps_data.latitude);// 纬度 OLED_ShowDecimal(48,6, current_gps_data.latitude,2,4,16,0); printf("Longitude: %.6f°\r\n", current_gps_data.longitude);//经度 OLED_ShowDecimal(48,3, current_gps_data.longitude,3,4,16,0); printf("Altitude: %.1f m\r\n", current_gps_data.altitude); printf("Satellites: %d\r\n", current_gps_data.satellites); printf("Fix Quality: %d\r\n", current_gps_data.fix_quality); // 根据定位质量显示状态 switch(current_gps_data.fix_quality) { case0:printf("Status: Invalid fix\r\n");break; case1:printf("Status: GPS fix\r\n");break; case2:printf("Status: DGPS fix\r\n");break; default:printf("Status: Other fix (%d)\r\n", current_gps_data.fix_quality);break; } } else { // 即使没有有效定位,也显示时间和卫星信息 if(current_gps_data.time.hour !=0|| current_gps_data.time.minute !=0|| current_gps_data.time.second !=0) { print_gps_time(¤t_gps_data.time); printf("\r\n"); } printf("No valid GPS fix\r\n"); OLED_ShowString(60,6,"None",16,0); OLED_ShowString(60,3,"None",16,0); printf("Satellites in view: %d\r\n", current_gps_data.satellites); printf("Waiting for satellite lock...\r\n"); } printf("==========================\r\n"); }}i2c_master_event_ti2c_event = I2C_MASTER_EVENT_ABORTED;voidsci_i2c_master_callback(i2c_master_callback_args_t*p_args){ i2c_event = I2C_MASTER_EVENT_ABORTED; if(NULL!= p_args) { /* capture callback event for validating the i2c transfer event*/ i2c_event = p_args->event; }}//fsp_err_t err = FSP_SUCCESS;int timeout_ms =100;voidhal_entry(void){ /*TODO:add your own code here */ err =R_SCI_UART_Open(&g_uart9_ctrl, &g_uart9_cfg); assert(FSP_SUCCESS == err); printf("RA4M2 GPS Reader Started\r\n"); // 系统初始化 init_system(); uint32_tstatus_counter =0; /* Initialize IIC OLED */ err =R_SCI_I2C_Open(&g_i2c2_ctrl, &g_i2c2_cfg); assert(FSP_SUCCESS == err); OLED_Init(); OLED_Clear(); OLED_DrawBMP(0,0,128,8,BMP1,0);// initialized page -> Renesas logo R_BSP_SoftwareDelay(200, BSP_DELAY_UNITS_MILLISECONDS); /*----------- Frame ------------*/ OLED_Clear(); OLED_ShowString(0,0," GPS ",16,1); OLED_ShowCHinese(56,0,0,1);//定 OLED_ShowCHinese(72,0,1,1);//位 OLED_ShowCHinese(88,0,2,1);//器 OLED_ShowString(104,0," ",16,1); //OLED_ShowString(4,3,"ADC",16,0); OLED_ShowCHinese(0,3,3,0);//经 OLED_ShowCHinese(16,3,5,0);//度 OLED_ShowChar(32,3,':',16,0); OLED_ShowCHinese(112,3,6,0);// ° OLED_ShowCHinese(0,6,4,0);//纬 OLED_ShowCHinese(16,6,5,0);//度 OLED_ShowChar(32,6,':',16,0); OLED_ShowCHinese(112,6,6,0);// °
while(1){ process_gps_data();// 原始GPS数据 print_parsed_gps_data();// 解析GPS数据 // 每隔一段时间打印状态 status_counter++; if(status_counter >=1000)// 约每10秒 { printf("[Status] System running...\r\n"); if(current_gps_data.is_valid) { printf("[Status] GPS fix acquired\r\n"); } else { printf("[Status] Waiting for GPS fix\r\n"); } status_counter =0; }
R_BSP_SoftwareDelay(10, BSP_DELAY_UNITS_MILLISECONDS);// 延时 }#ifBSP_TZ_SECURE_BUILD /* Enter non-secure code */ R_BSP_NonSecureEnter();#endif}
GPS 模块解析代码gps_parser.c和gps_parser.h详见:【RA4M2-SENSOR】串口读取 GPS.
OLED 驱动代码oled.c、oled.h、bmp.h和oledfont.h详见:【RA2E1开发板】 - IIC 通信的 OLED 显示.
2. 汉字取模
下载 并运行PC2LCD2018软件 ;
菜单栏模式设置为字符模式;
点击工具栏中的设置按钮,配置字模选项:列行式取模、低位在前等,设置完成后点击确定保存配置;
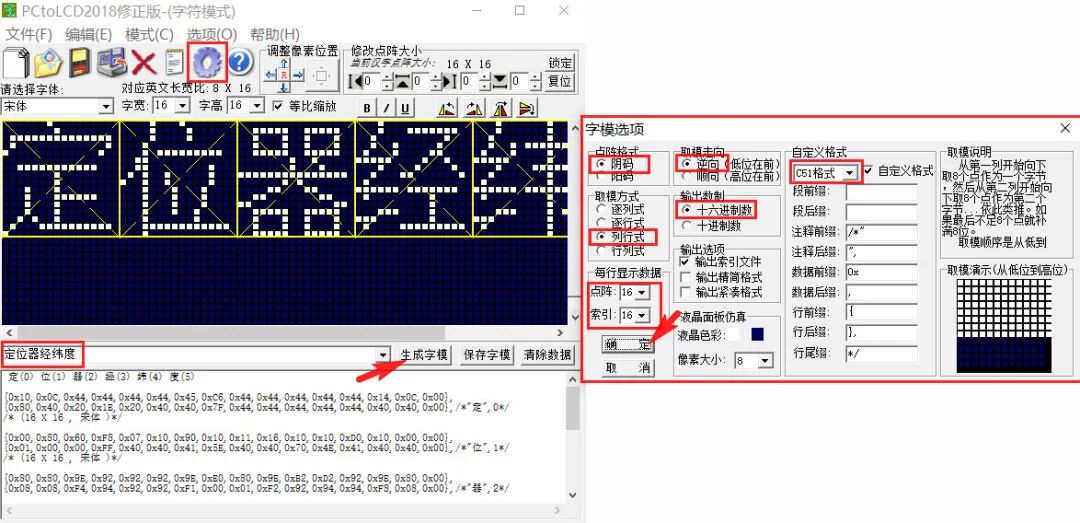
在文字输入选框输入目标汉字,点击生成字模;
选中复制或保存字模,代码添加至oledfont.h文件。
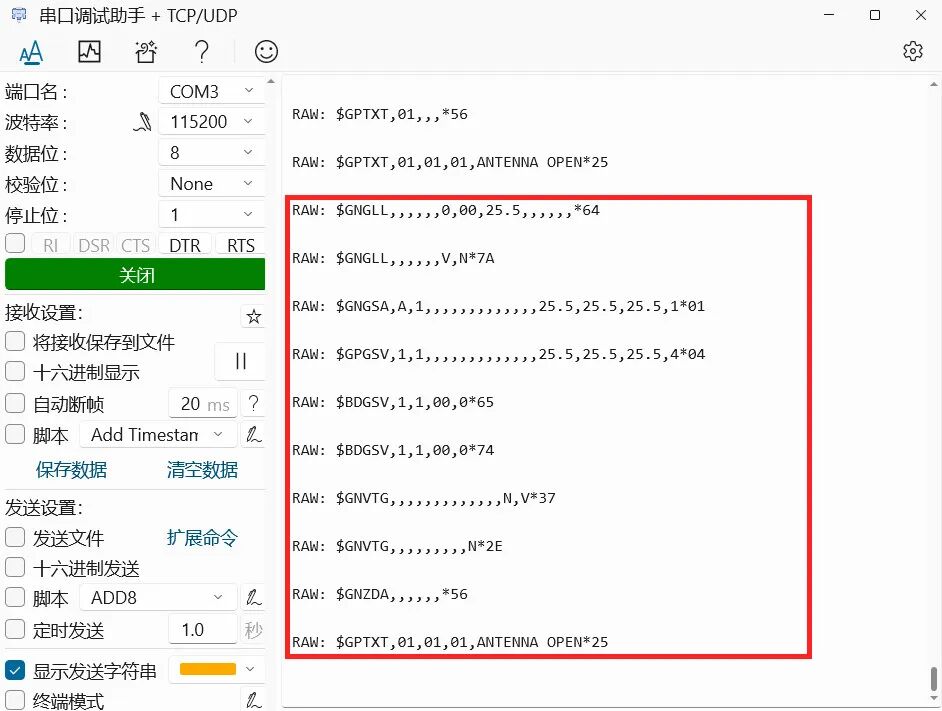
五、效果演示
串口调试助手接收 GPS 原始数据和解析数据;
使用移动电源供电,实现便携式 GPS 定位器设计;
OLED 显示实时卫星定位经纬度信息
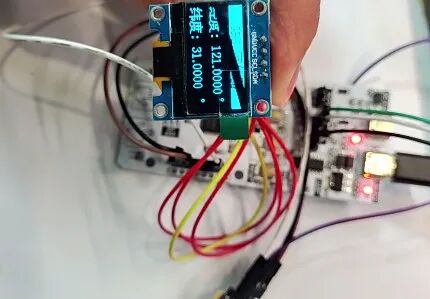
将上述采集得到的经纬坐标 (121,31) 输入网址 经纬度定位 ,点击 查询 按钮,可获得对应的地理位置
定位结果与实际位置 (121.45,31.03) 较为接近。

六、总结
本文介绍了 RA4M2-SENSOR 通过 IIC 协议实现 OLED 显示,并结合串口通信读取 GPS 模块数据,实现便携式卫星定位器的项目设计,为该产品的相关开发设计与快速应用提供了参考。
-
gps
+关注
关注
22文章
3063浏览量
174369 -
定位器
+关注
关注
2文章
192浏览量
20276 -
开发板
+关注
关注
26文章
6524浏览量
121396
发布评论请先 登录
【RA4M2-SENSOR开发板评测】基础架构与环境感知


【RA4M2-SENSOR】—— 2.串口通讯测试
【RA4M2-SENSOR】1、开箱+新建模板工程
【RA4M2-SENSOR】介绍、环境搭建、工程测试
【RA4M2-SENSOR】串口读取 GPS
【RA4M2-SENSOR】便携 GPS 定位器
【RA4M2-SENSOR】 Keil开发环境建立和跑马灯运行
【RA4M2-SENSOR】数字识读及实现
【精品聚合】RA-Eco-RA4M2-100PIN开发板试用报告作品汇总
【干货分享】从零学习使用瑞萨RA6M4开发板
【有奖评测 】RA4M2-SENSOR 开发板免费评测



评论