 OmniHand 2025系列灵巧手的核心技术
OmniHand 2025系列灵巧手的核心技术

OmniHand 2025系列灵巧手(含 灵动款 与 专业款 )通过多项技术创新,在 高自由度、轻量化、多模态感知、成本控制 等方面实现了突破。以下是其核心技术亮点:
1. 高自由度与轻量化设计
- 自由度配置 :
- 灵动款 :16个自由度,重量仅 500g ,尺寸 180mm ,适用于交互服务(如家庭陪伴、商场服务)。
- 专业款 :19个自由度,重量 750g ,单指最大输出 20N力 ,满足精密工业作业需求(如3C电子组装、汽车装配)。
- 自研Powerflow关节模组 :
- 提升 扭矩密度 与 散热性能 ,降低硬件成本约 40% ,减少对外部高端零部件依赖。
2. 多模态感知与力控技术
- 触觉与力控精度 :
- 多模态感知融合 :
- 结合 力觉、触觉、惯性测量(IMU) ,实现复杂环境下的自适应操作(如抓取不规则物体)。
3. 自研核心模组与算法
- Powerflow关节模组 :
- 力控与运动算法 :
- 支持 实时力控 与 手势识别模型 ,适配 工业装配、科研训练 等场景(如模拟人手操作医疗器械)。
4. 成本优化与规模化适配
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械臂
+关注
关注
14文章
601浏览量
26186 -
人形机器人
+关注
关注
7文章
1059浏览量
18544 -
灵巧手
+关注
关注
0文章
57浏览量
330
发布评论请先 登录
相关推荐
热点推荐
从方案视角探究:灵巧手所需的电机驱动与传感技术
篇首语:在灵巧手系统中,MCU 作为整个方案的控制核心,通过多维度技术整合与协同,实现复杂操作功能。例如,在灵巧手实现多自由度精准调控时,MCU 能够凭借编程精确的控制

不到万元!智元机器人高自由度灵巧手做到了
电子发烧友网综合报道 日前,智元机器人正式推出 OmniHand 2025 系列灵巧手,包含面向交互服务的「灵动款」与专注专业作业的「专业款」两大产品。灵动款尺寸为 180mm,重量为

蓝牙核心技术概述
蓝牙核心技术概述(一):蓝牙概述蓝牙核心技术概述(二):蓝牙使用场景蓝牙核心技术概述(三): 蓝牙协议规范(射频、基带链路控制、链路管理)蓝牙核心技术概述(四):蓝牙协议规范(HCI、
发表于 11-24 16:06
含弧形自由度仿人灵巧手掌的机构设计
提出了一种人手掌的简化模型,根据该模型,设计了仿人灵巧手掌的机构,使得只作为仿人灵巧手手指及其控制部件机架的手掌形成弧形自由度参加手部动作,提高了仿人灵巧手通
发表于 08-13 10:10
•22次下载
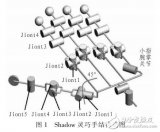
Shadow仿人灵巧手动力学研究
仿人灵巧手应用于中医按摩领域,对手部的灵巧性有很高的要求,机器人动力学逆问题的研究旨在改善机器人控制系统工作的稳定性和控制精度,实现对灵巧手的最优控制,达到良好的动态性能和最优指标。 文中研究的对象
发表于 11-16 14:20
•16次下载
气动人工肌肉驱动的灵巧手控制系统
随着灵巧手技术的发展,其控制方式也在不断发展。自主控制和主从控制是其主要的两种控制方式。灵巧手的自主控制是指其根据给定任务和外界条件,能够自主的决定操作过程并完成任务,体现了灵巧手的高智能性。在主从
发表于 03-26 15:49
•1次下载

英国Shadow Robot公司Shadow 灵巧手
Shadow灵巧手一共拥有24个自由度,其中20个由电机驱动,4个欠驱动。这24个自由度每一个都有与人类相近的运动范围,允许其做出与人手类似的动作。 Shadow灵巧手它还具备了129个内置传感器
发表于 04-08 14:47
•3357次阅读
人形机器人“灵巧手”,正在接近27个自由度的人手
电子发烧友网报道(文/黄晶晶)灵巧手是人形机器人核心零部件之一,以人类的手来看通常被认为具有27个自由度,自由度越高,其动作越精细。特斯拉二代Optimus的灵巧手已经拥有22个自由度。 灵巧

直播回顾丨聚焦 “场景落地” ,虹科直播带您解锁高自由度灵巧手核心技术!
灵巧手行业热点2026Insights在人形机器人由“可行走”迈向“可工作”的关键阶段,灵巧手已成为决定其功能上限与商业化速度的核心子系统。打造一双足够好用、且成本与性能平衡的灵巧手,

灵巧手触觉感知技术深度报告:从“单点感知”到“触觉成像”
电子发烧友网报道(文/莫婷婷)随着人形机器人产业从“运动控制”向“精细操作”跨越,灵巧手已成为决定机器人能否真正融入人类生活与生产场景的关键部件。而赋予灵巧手“灵魂”的核心,在于其感知系统——尤其是

空心杯电机,为何成为人形机器人灵巧手的 “香饽饽”?
人形机器人的灵巧手,堪称机器人与外界交互的“魔法之手”,承担着各类复杂而精细的操作任务。从精准抓取微小物件,到灵活完成复杂装配工作,灵巧手的出色表现离不开其内部核心驱动部件—电机的强力支持。在众多

灵巧手驱动技术深度报告:空心杯电机黄金赛道,高壁垒与高增长并存
电子发烧友网综合报道,人形机器人的核心执行部件灵巧手的性能直接决定了机器人完成精细操作任务的能力。其中,驱动系统作为灵巧手的“肌肉”和动力源,其技术路线的选择直接影响了整手的性能、成本




评论