 康谋分享 | 物理级传感器仿真:破解自动驾驶长尾场景验证难题
康谋分享 | 物理级传感器仿真:破解自动驾驶长尾场景验证难题

自动驾驶研发面临"长尾效应"的终极挑战:海量边缘场景需要近乎无限的测试里程。仿真测试虽已成为行业共识,但其真实度仍存根本性质疑——当多数平台仍停留在视觉逼真层面时,感知算法的低阶数据处理和鲁棒性测试已触及验证天花板。
其实,真正的物理级仿真必须从数据源头出发:从光子穿透镜头到电信号转换,从激光能量分布到多回波散射,每一个物理环节都会直接影响算法在现实世界中的表现。
基于此,本文将深入解析摄像头与激光雷达的物理建模机制,并解读2025新兴标准ASAM OpenMATERIAL 3D,从而探讨如何为高可信度仿真提供关键基础的问题!
01 镜头模型的光学物理建模
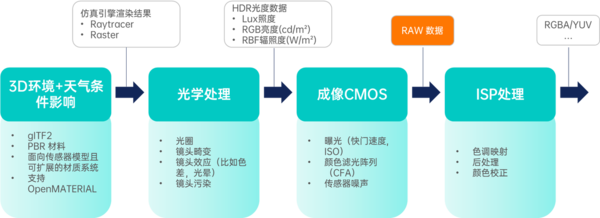
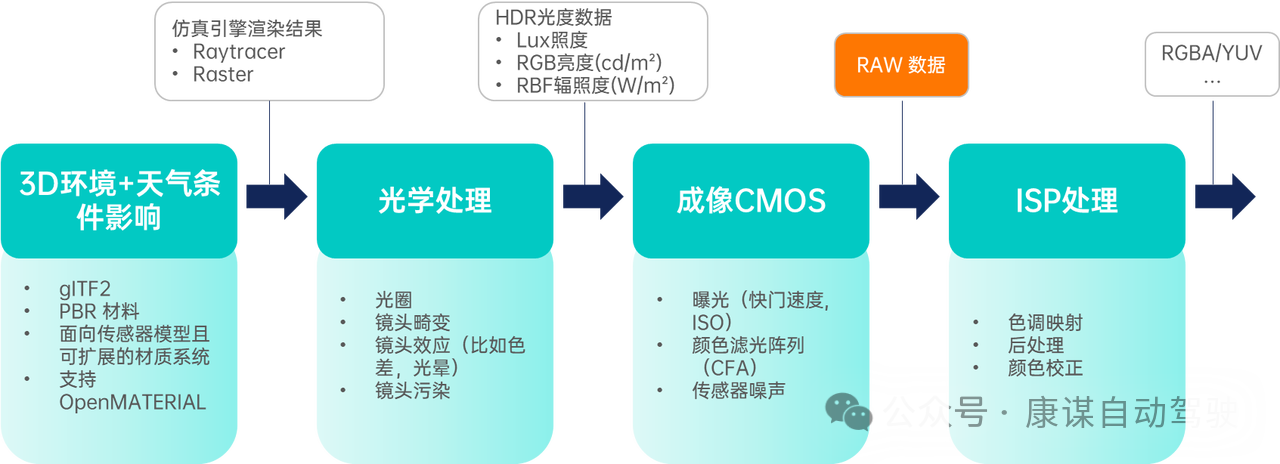
传统的摄像头仿真,其终点往往是一张“干净”的RGB图像。这对于高级规划控制算法或许足够,但对于依赖图像原始信息的感知算法开发者而言,这无异于在精装修的样板间里测试建筑结构。他们真正需要的,是模拟从光子穿过复杂镜头组,到CMOS传感器输出原始电信号的全过程。
1、畸变原理与参数化建模
现代车载广角/鱼眼镜头的非线性失真很难靠针孔模型捕捉。这种畸变始于镜片的设计:曲率、镜间距离、材料折射率、涂层结构等都会造成光线偏折与映射失真。
高保真建模路径:
(1)畸变函数:(如 fisheye、Mei、F‑Theta、EUCM 等)源自具体镜头标定,能描述像素偏移;
(2)多项式系数模型:捕捉畸变随径向变化的非线性,用于语言和超广角镜头;
(3)LUT(查找表)方式:直接复刻真实标定点映射,将任意复杂畸变精准还原。
技术意义:光学还原误差的减少将会直接提升后续曝光、噪声叠加的物理建模可信度,还能从光学角度模拟不同的镜头效应。
02 CMOS传感器光电仿真
1、光电转换与噪声建模
相机 RAW输出用户关注的是两个关键过程:
(1)Quantum Efficiency(QE):光子转化为电子的效率;
(2)Conversion Gain:每个电子转换成输出电压的增益。
从辐射曝光到电压的转换公式可表示为:
photon_energy=(h⋅c) / λ
其中:
(1)h:普朗克常数;
(2)c:光速m/s;
(3)λ:RGB各通道的波长,以m为单位。
radiant_exposure_to_voltage=(pixel_size2)/ photon_energy x quantum_efficiency x conversion_gain
其中:
(1)radiant_exposure_to_voltage:表示将辐照度(光能量密度)转换为电压信号的转换因子,单位通常是伏特每单位辐照度;
(2)pixel_size:像素的边长,单位通常是米(m)。这里用平方表示像素面积,即 pixel_size2pixel_size2,表示单个像素接收光子的有效面积;
(3)photon_energy:单个光子的能量,单位是焦耳(J)。由公式 h⋅cλλh⋅c 计算,其中 hh 是普朗克常数,cc 是光速,λλ 是光的波长;
(4)quantum_efficiency:量子效率,表示入射光子被探测器转换为电子的效率,通常是一个小于1的无量纲数。
(5)conversion_gain:转换增益,表示电子信号转换为电压信号的增益,单位通常是伏特/电子(V/electron);
同时考虑:
(1)Shot Noise(光子噪声):自然量子过程下的统计波动;
(2)Read Noise(读出噪声):来自电路本身的不确定性;
(3)ADC 量化误差:由电压摆幅与位数决定。

8bit CFA Bayer(预处理)
2、非线性响应与增益控制
模拟域增益与数字域增益、PWL 非线性函数可让模型真实复现CMOS 增益压缩、饱和与拉伸特性。
价值亮点:算法开发者不再用“拟真滤镜”,而是直接在复刻硬件真实响应的“数据源”上验证性能,真实评估弱光、过曝下的鲁棒性。
03 LiDAR 建模:高斯射线与物理衰减
1、光束结构与多回波
真实LiDAR发出的激光是包含能量分布的高斯光束,而非理想“无宽度射线”。通过参数化:
(1)Beam divergence控制光束发散角;
(2)Beam sampling density决定光斑内采样次数;
(3)高斯能量分布可模拟光斑中心与边缘的能量差异;
(4)Secondary Returns模拟光束穿透薄物体或发生多次反射后的回波情形。
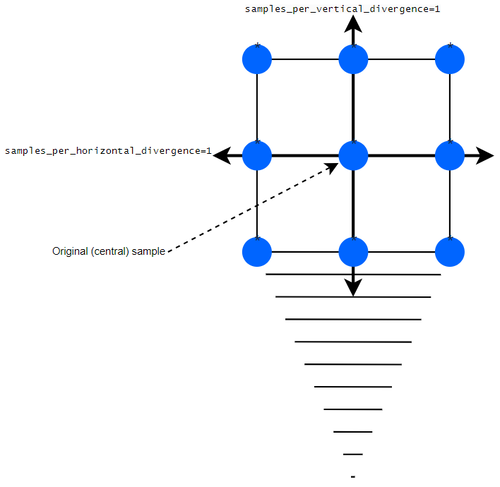
在发射角范围内进行指定数量的采样
核心优势:这种建模方式,使得仿真器能够更精确地模拟物体边缘的探测效果、小目标的漏检概率,以及由单次发射脉冲击中不同距离物体而产生的多重回波。这对于依赖点云密度和回波信息的聚类、分割算法的验证,具有不可替代的价值。
2、大气与天气中的物理衰减
激光在雨雾雪中传播时会经历:
(1)大气消光(Extinction):受可见度、Mie 散射、水滴大小和雷雨强度控制;
(2)多模态散射:粒径分布影响波长选择,对 905nm 或 1550nm 波段影响不同;
(3)点云强度、范围测量误差:由上述物理机制驱动,而非随机丢弃。
核心优势:可输出“雨天 50mm/h 下探测 80m、反射率 10% 行人的概率为 X%”这类量化结论,是生成鲁棒性验证报告的关键。

(左)雨天 30mm/h 积水覆盖率90%,(中)雨天 15mm/h 积水覆盖率45%,(右)雨天 4mm/h 积水覆盖率25%
04 ASAM OpenMATERIAL 3D新标准
1、精准材料属性的行业统一标准
ASAM于2025 年 3 月发布的OpenMATERIAL 3D,专注定义环境中物体的真实物理属性:折射率、粗糙度、BRDF查找表、材质密度等。
其优势包括:
(1)跨平台协同建模:格式通用,支持 ASAM OpenDRIVE、OpenSCENARIO、OSI 等;
(2)适用于感知仿真:雷达、摄像头、LiDAR 均可引用同一材质库;
(3)动态结构兼容:支持如车轮等运动部件的层次结构定义。
融合意义:物理建模所依赖的不只是参数,更是材料本身——OpenMATERIAL 3D 从源头打通了场景物理真实与传感建模之间的壁垒。
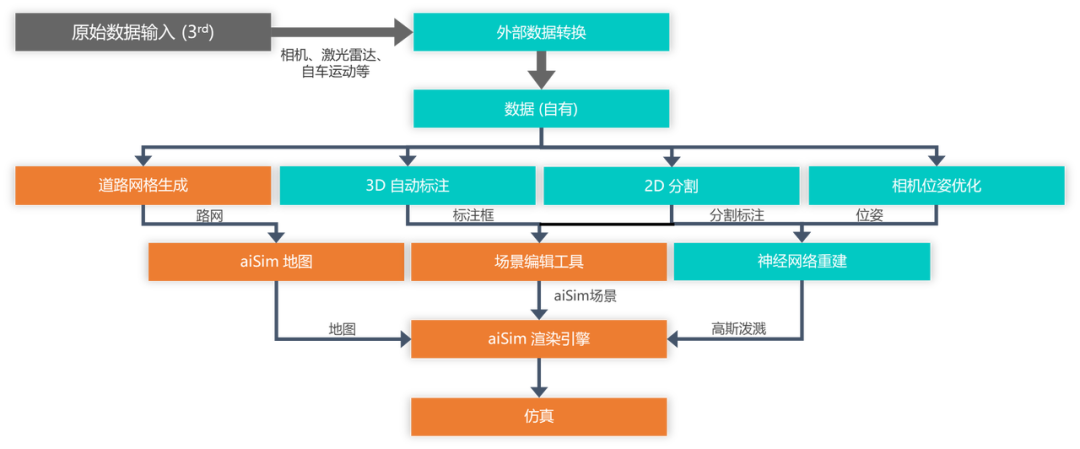
aiSim Archer:对全新OpenMATERIAL 标准 (ASAM OpenMATERIAL®3D)进行了实现。
05 物理建模与标准的行业协同
从镜头畸变模型、CMOS 噪声链到LiDAR 多回波和天气衰减,物理级建模让仿真的“数据表现”不再是肉眼看起来真,而是“行为上真实”。而标准化的材料规格,如ASAM OpenMATERIAL 3D,更是将它推向行业共识。
这一切,最终目标都是构建一个“可信仿真”的闭环:真实物理参数驱动的模型 → 标准化定义的材料属性 → 支持跨平台共享与验证 → 支撑自动驾驶场景真实测试与算法验证。
而将这些关键模块实现并集成于仿真平台中(即aiSim所专注的),才是落地这一周期验证环路的技术核心。
具体的Raw 图参数调教示例、LiDAR 参数配置样板或图示优化建议可获取
-
传感器
+关注
关注
2578文章
55811浏览量
795432 -
仿真
+关注
关注
55文章
4567浏览量
138817 -
建模
+关注
关注
1文章
324浏览量
63532 -
验证
+关注
关注
0文章
69浏览量
15761 -
自动驾驶
+关注
关注
795文章
15056浏览量
181991
发布评论请先 登录
软件在环(SIL)测试方案及康谋aiSim实现路径

康谋新闻 | 康谋与Coppelia Robotics正式建立合作伙伴关系!

自动驾驶场景生成方法及优选方案:康谋aiSim 3DGS方案重塑行业标准
自动驾驶仿真软件推荐:康谋aiSim——ISO 26262 ASIL-D 认证的高保真选择
L4级自动驾驶数据采集系统首选
深度解析:康谋双模态仿真测试解决方案!
自动驾驶数据采集时间同步指南:方法、挑战、场景与康谋解决方案
L4级自动驾驶数据采集系统首选——康谋科技DATALynx ATX4 & BRICK系列全解析
端到端智驾仿真软件推荐:全球首款ASIL-D认证平台助您突破自动驾驶测试瓶颈
康谋新闻 | 实力认证!康谋aiSim荣获ASAM“自动驾驶仿真技术奖”
自动驾驶仿真测试有什么具体要求?

康谋新闻 | 康谋加入ASAM组织,全球首个ASIL-D认证自动驾驶仿真平台aiSim引领安全新标杆

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践

物理级传感器仿真:破解自动驾驶长尾场景验证难题
康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证




评论