 2025高端扫地机器人MOSFET选型分析:从分立器件到系统级能效革命
2025高端扫地机器人MOSFET选型分析:从分立器件到系统级能效革命

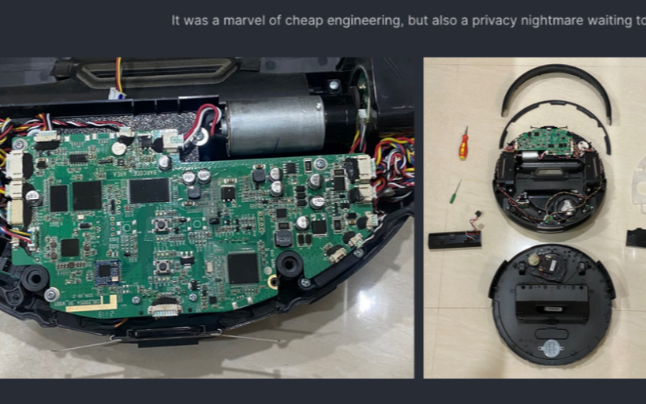
在2025年智能清洁设备激烈竞争中,旗舰级扫地机器人的性能边界正被MOSFET技术重新定义。本文深度拆解最新一代产品的功率电子架构,揭示三大核心发现:
1、器件数量激增:单机MOSFET用量突破40颗,驱动、传感、供电模块的协同设计成为关键;
2、参数军备竞赛:RDS(on)进入亚毫欧时代,VBSEMI/英飞凌/TI等厂商竞逐0.9mΩ极限;
3、失效模式升级:热管理从“被动散热”演进为“AI预测性温控”,GaN与SiC技术开始渗透消费级场景。
透过这份技术图谱,您将掌握下一代清洁机器人功率电子的设计密码。
高端扫地机器人的性能飞跃依赖于功率电子器件的精密控制,其中MOSFET作为核心开关元件,直接影响电机效率、续航能力和系统稳定性。以下是基于2025年旗舰机型的全模块技术拆解:
一、MOSFET的核心应用场景与选型逻辑
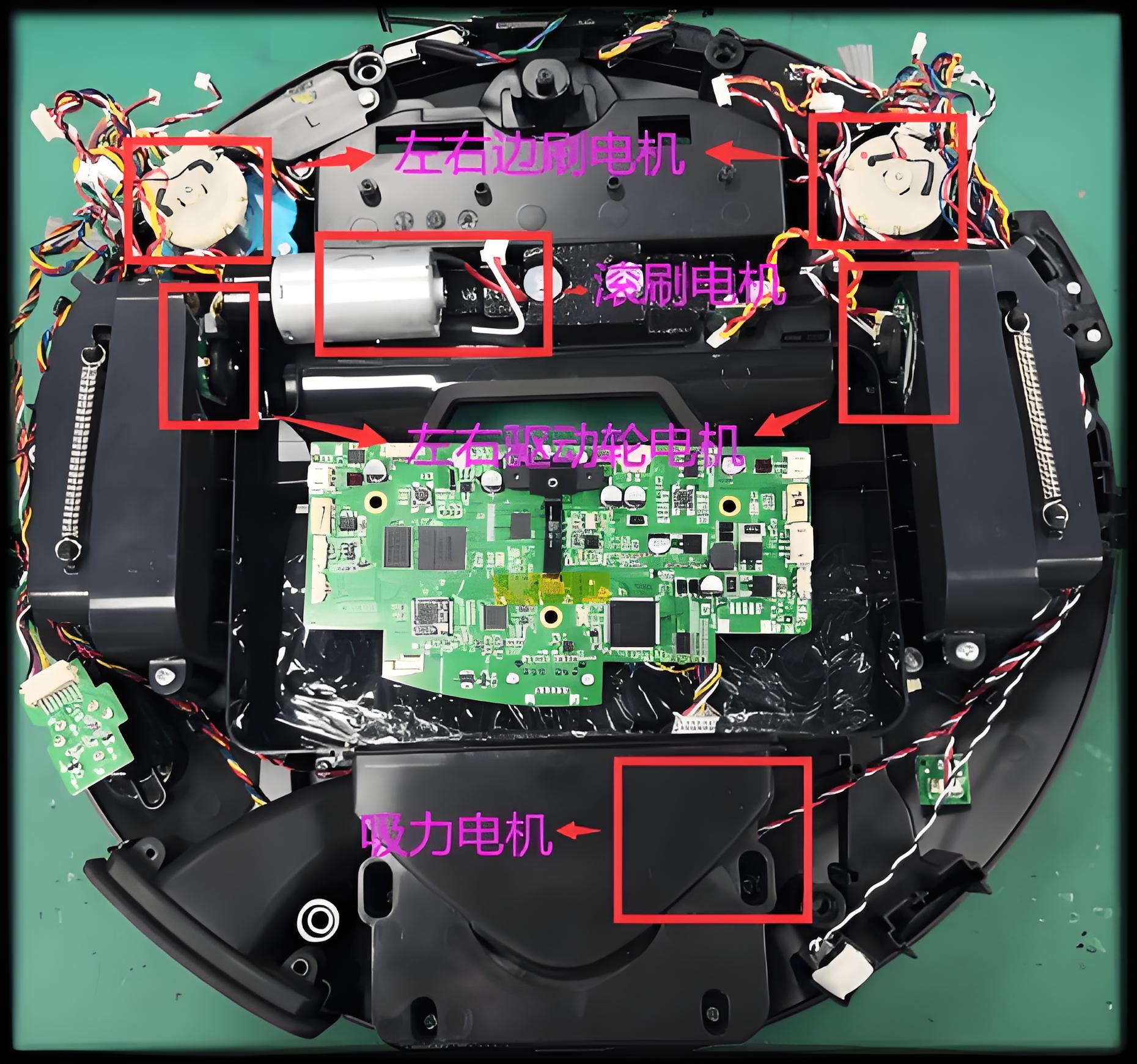
1. 多电机驱动系统
应用模块:
主轮无刷电机(2颗,驱动移动)
边刷有刷电机(2颗,侧边清扫)
双滚刷电机(2颗,胶毛一体设计)
升降拖布电机(1颗,压力调节)
MOSFET需求:
数量:每颗无刷电机需6颗MOSFET(三相全桥),有刷电机需4颗(H桥),总计约20-30颗。
关键参数:
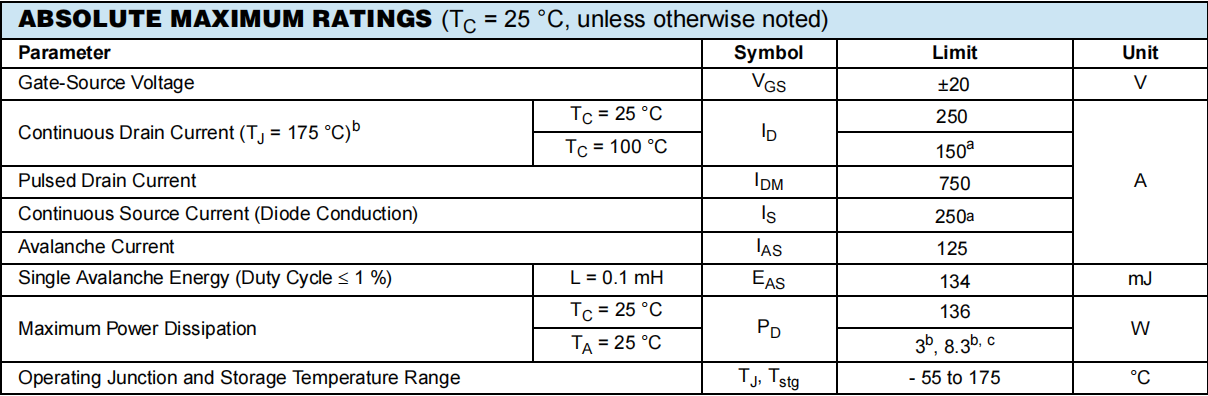
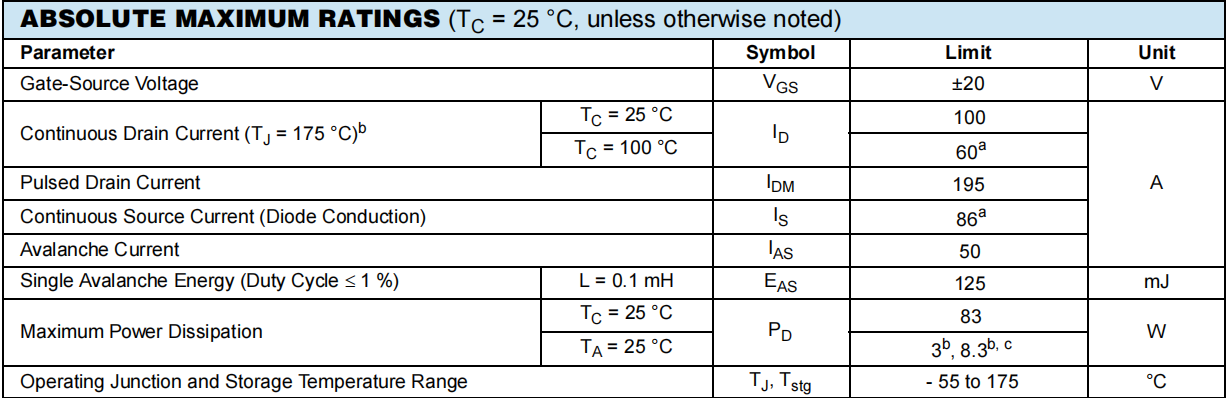
耐压≥30V(锂电池供电峰值电压)
持续电流10-20A(主轮电机瞬时负载)
RDS(on)<5mΩ(降低热损耗,如VBGQA1400)
功能需求:
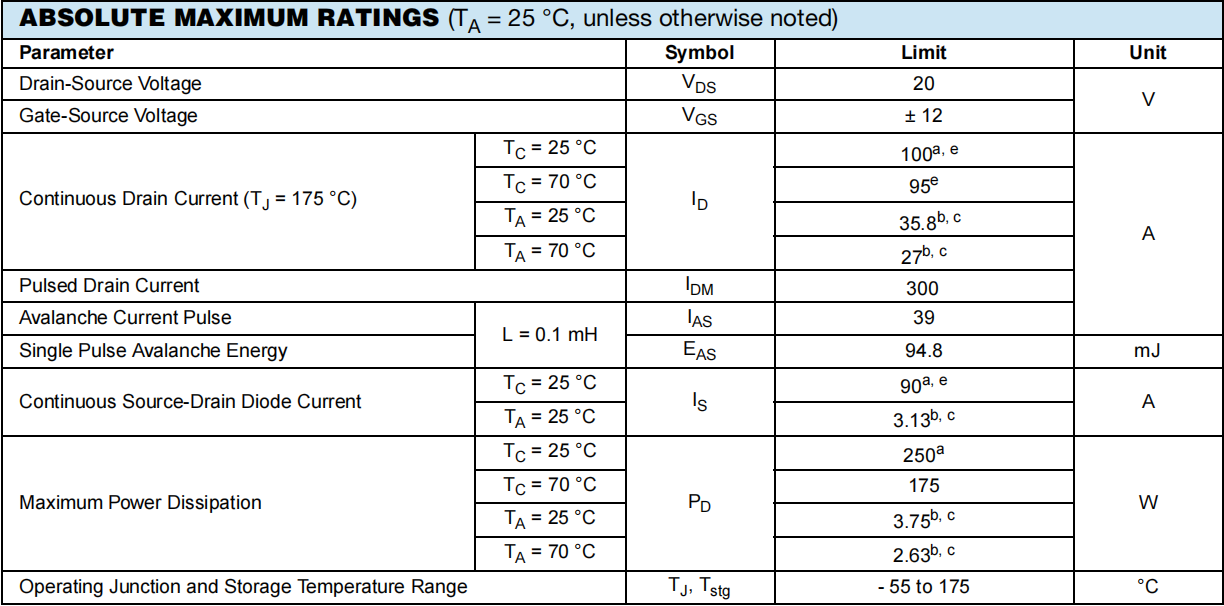
支持100W快充(20V/5A输入,如VBGQF1402)
放电回路智能通断(防过放)
MOSFET配置:
数量:4颗(充放电回路各2颗背靠背连接)
选型要点:
反向恢复时间(trr)<50ns(减少开关损耗)
VGS(th)1.8-2.5V(兼容低电压MCU控制)
封装:DFN3X3(如VBQF1202)
MOSFET角色:
负载开关:控制传感器组电源通断(如VB1240,SOT-23封装)
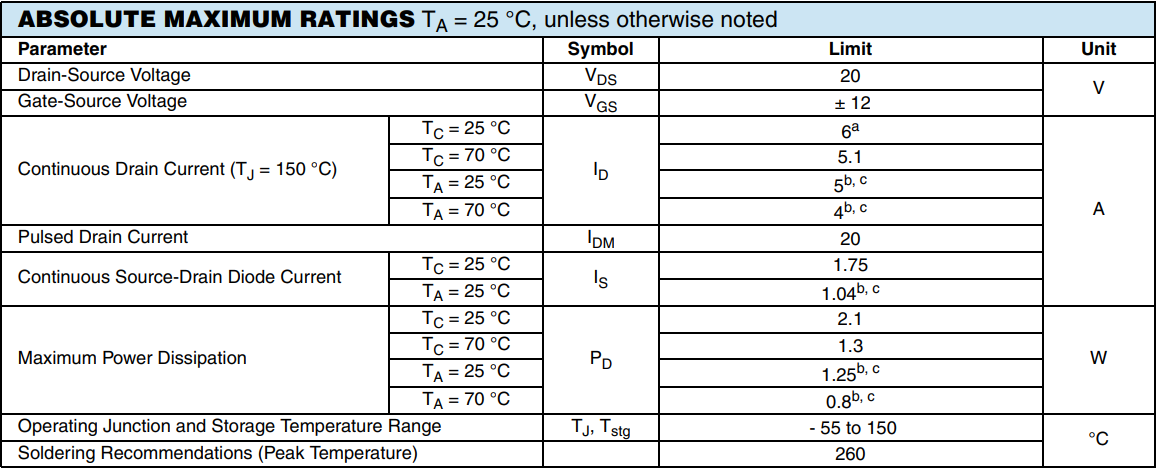
数量:每传感器组1-2颗,整机约8-12颗。
二、2025年高端机型MOSFET技术标杆

三、失效分析与可靠性设计
1、热管理挑战:
电机驱动MOSFET需配合铜基板散热(如石头G20的“石墨烯均热层”)。
2、寿命测试标准:
连续10万次开关循环后RDS(on)漂移<10%。
四、未来技术演进方向
1、宽禁带半导体替代:SiC MOSFET在快充模块的应用(效率提升5%)。
2、AI动态调参:根据地面阻力实时优化MOSFET开关频率(如科沃斯X3的“EcoPower 3.0”算法)。
总结:2025年高端机型MOSFET用量达40-50颗,选型从“单一性能”转向系统级协同设计,成本占比升至BOM的15%-20%。
审核编辑 黄宇
-
MOSFET
+关注
关注
152文章
10919浏览量
235920 -
分立器件
+关注
关注
5文章
275浏览量
22351 -
扫地机器人
+关注
关注
21文章
862浏览量
55966
发布评论请先 登录
扫地机器人“叛变”了
五年磨一剑,大疆终于官宣ROMO扫地机器人

RTC实时时钟:实现智能扫地机器人精准作业与定时

解锁扫地机器人“类人智能”的时钟密钥

INDEMIND脏污识别技术赋能扫地机器人功能进化
扫地机器人传感器电路:电容过滤地面颠簸带来的 “信号噪声”
晶振在扫地机器人中的核心作用
扫地机器人的几种语音控制芯片方案介绍
大疆官宣入局,将重塑“扫地机器人”行业新格局?
基于上海贝岭产品的扫地机器人应用方案
基于东芝产品的扫地机器人设计方案

中微半导扫地机器人解决方案介绍




评论