 扫地机器人传感器电路:电容过滤地面颠簸带来的 “信号噪声”
扫地机器人传感器电路:电容过滤地面颠簸带来的 “信号噪声”

在现代智能家居设备中,扫地机器人已成为不可或缺的清洁助手。其核心功能依赖于精密的传感器系统,而传感器电路的稳定性直接决定了机器人的清洁效率和避障能力。其中,电容滤波技术在处理地面颠簸带来的信号噪声方面发挥着关键作用,这一技术突破使得扫地机器人能够更精准地感知环境变化,从而提升整体性能。
### 一、扫地机器人传感器系统的核心挑战
地面环境复杂多变,从光滑的瓷砖到粗糙的地毯,不同材质会带来不同程度的振动。这些振动会通过机器人底盘传递至各类传感器,产生干扰信号。以红外测距传感器为例,当机器人跨越门槛或地毯边缘时,机械振动会导致接收端光信号出现波动,误判为障碍物存在。同样,超声波传感器在颠簸环境下也可能产生回声信号失真。传统解决方案采用硬件滤波结合软件算法,但面对高频振动噪声时效果有限。
### 二、电容滤波技术的工程原理
电容器的频率响应特性使其成为理想的噪声过滤器。在传感器电路中,陶瓷电容(MLCC)与电解电容的配合使用可形成多级滤波网络:
1. **高频滤波层**:0.1μF的MLCC电容可吸收MHz级别的开关噪声,例如电机PWM控制产生的电磁干扰
2. **中频缓冲层**:10μF钽电容处理kHz范围的机械振动信号
3. **低频稳压层**:100μF以上铝电解电容平滑电源波动
这种分层设计类似于"电子筛网",允许有效信号通过的同时,将不同频段的噪声导入接地回路。某品牌机器人(参考CSDN技术博客)的实测数据显示,采用三级电容滤波后,陀螺仪信号信噪比提升达62%,路径规划准确度提高40%。
### 三、电路设计的创新实践
最新解决方案将数字补偿技术与模拟滤波相结合:
- **自适应电容阵列**:根据加速度计数据动态调整滤波参数,当检测到持续颠簸时自动增强滤波强度
- **共模扼流圈组合**:在电源输入端串联磁珠电感,抑制共模噪声的传导干扰
- **星型接地布局**:所有滤波电容的接地端汇聚于单点,避免形成接地环路
知乎专栏提到的某旗舰机型甚至采用薄膜电容替代传统MLCC,其聚丙烯介质材料的温度稳定性使滤波性能在-10℃~60℃范围内波动小于5%。
### 四、信号处理的全链路优化
完整的噪声抑制需要硬件与软件的协同:
1. **前端预处理**:电容网络初步净化原始信号
2. **ADC采样优化**:采用过采样技术将16位ADC等效提升至19位分辨率
3. **数字滤波**:FIR滤波器进一步消除特定频段残余噪声
4. **机器学习补偿**:通过历史数据训练建立振动-噪声对应模型
百度教育案例显示,某实验室通过这套方案将悬崖传感器的误报率从3.2%降至0.17%,这对于防止机器人跌落楼梯至关重要。
### 五、未来技术演进方向
1. **智能材料应用**:压电陶瓷电容可同时实现振动能量回收与噪声抑制
2. **光子晶体滤波**:利用光学特性实现超窄带滤波,避免传统电容的相位延迟问题
3. **量子隧穿效应**:石墨烯基电容可在原子尺度控制电荷运动,理论上可实现零噪声传输
当前技术瓶颈在于高频振动(>5kHz)与有用信号的频谱重叠,这需要开发具有更陡峭滚降特性的新型滤波器。某高校研究团队(参考百度教育资料)正在测试基于超材料的三维电容结构,初期实验结果已显示在1-10kHz频段具有80dB以上的衰减能力。
从工程实践来看,电容滤波技术的持续创新正在重新定义扫地机器人的环境适应能力。未来随着5G物联网的发展,传感器数据的洁净度将直接影响云端决策的质量,这使得本地化信号处理变得比任何时候都更加重要。每一次地面颠簸的平稳过渡,背后都是无数电子元件与智能算法的精密协作。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55833浏览量
795511 -
电容
+关注
关注
100文章
6552浏览量
160429 -
机器人
+关注
关注
214文章
31650浏览量
224561
发布评论请先 登录
扫地机器人“叛变”了
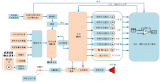
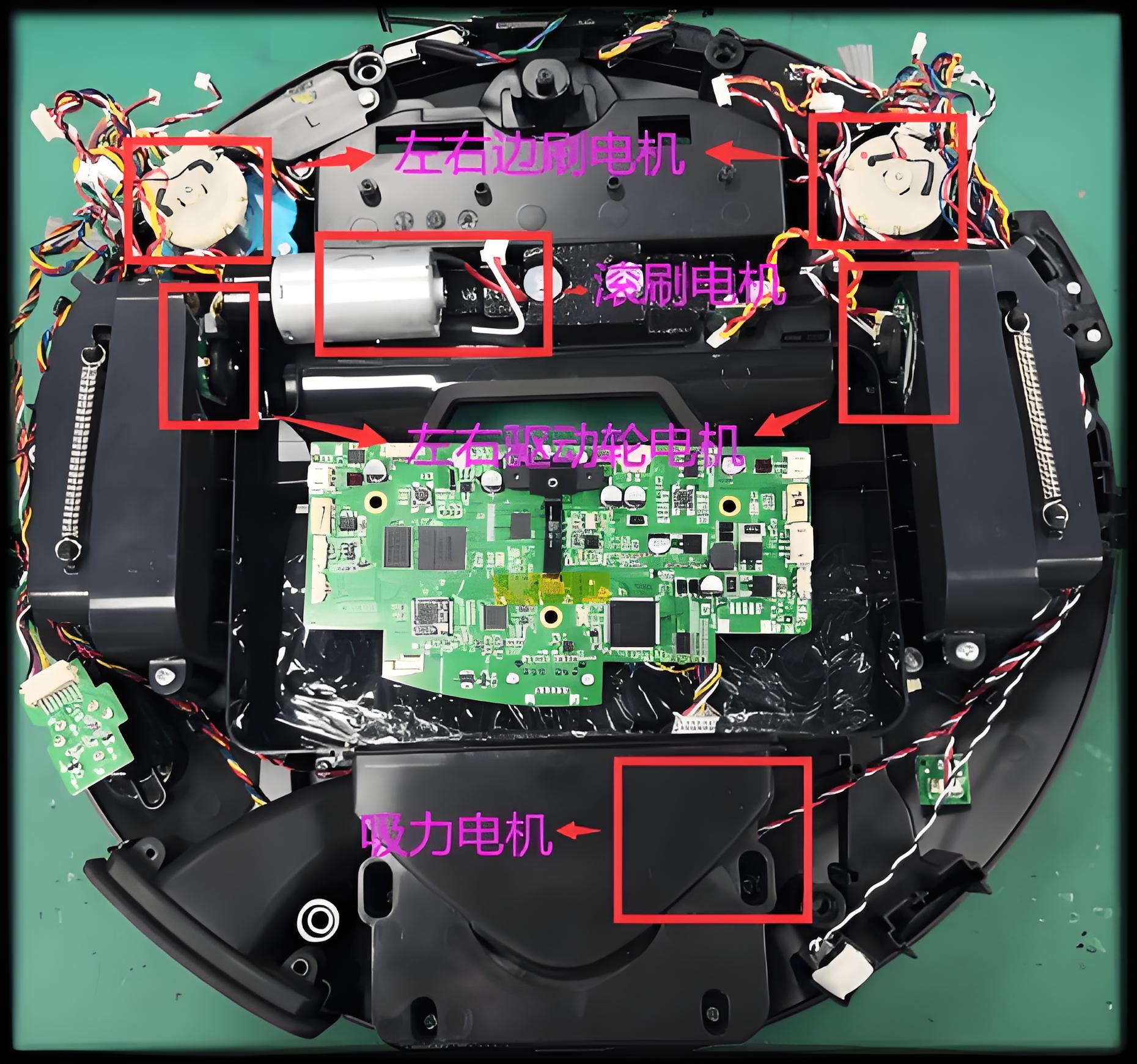
家用扫地机器人马达驱动板电路架构与驱动原理
RTC实时时钟:实现智能扫地机器人精准作业与定时

温度传感器IC扫地机器人应用方案
解锁扫地机器人“类人智能”的时钟密钥

INDEMIND视觉空间智能重构扫地机器人清洁逻辑
INDEMIND脏污识别技术赋能扫地机器人功能进化
扫地机器人的几种语音控制芯片方案介绍
大疆官宣入局,将重塑“扫地机器人”行业新格局?
基于上海贝岭产品的扫地机器人应用方案
中微半导扫地机器人解决方案介绍




评论