 自动驾驶毫米波雷达之间会相互干扰吗?
自动驾驶毫米波雷达之间会相互干扰吗?

[首发于智驾最前沿微信公众号]随着智能网联汽车的发展,交通环境感知技术(包括毫米波雷达、激光雷达和摄像头等)日益成为自动驾驶的核心组成部分。在这些传感器中,毫米波雷达因其全天候、高精度、抗干扰能力强等优点,被广泛应用于自动驾驶和高级辅助驾驶系统。近年来,量产车型上毫米波雷达的装配率不断提高,小鹏P7就配备了5颗毫米波雷达,理想ONE配备了4颗毫米波雷达,而华为支持的极狐阿尔法S高阶版更是搭载了6颗毫米波雷达。车辆越多、雷达部署越密集,毫米波频段的电磁信号越趋“拥挤”,这就带来了雷达互相干扰的潜在风险。在之前和大家讨论激光雷达是否会相互干扰时,就有小伙伴提问毫米波雷达之间是否会相互干扰,今天智驾最前沿就和大家聊聊这个话题。

毫米波雷达的工作原理
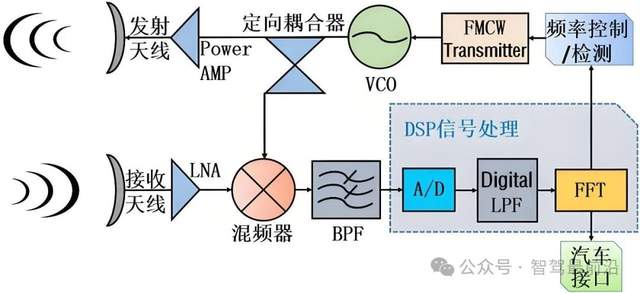
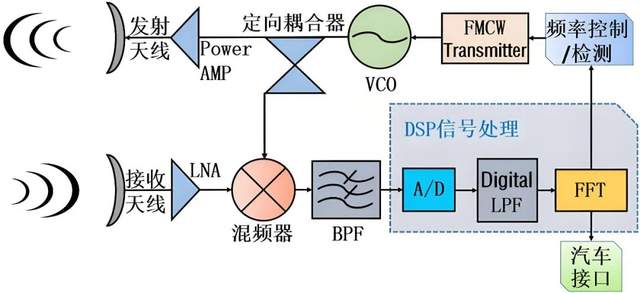
在聊毫米波雷达是否会相互干扰前,我们先了解下毫米波雷达是如何工作的。毫米波雷达其实是一种利用高频电磁波来测量周围目标的传感器。它通过天线发射毫米波(波长通常在1 mm~10 mm),然后接收目标反射回来的回波信号。雷达系统根据发射脉冲和接收回波之间的时间差来计算目标与车辆之间的距离;如果目标在运动,反射波的频率会发生多普勒偏移,雷达也能据此测量目标的相对速度和行驶方向。经过处理后,毫米波雷达可以快速获取汽车包括障碍物的位置、速度、角度等周围环境信息。与摄像头不同的是,毫米波雷达几乎不受光照和天气影响,即使在夜间、雨雪、雾霾等恶劣条件下也能稳定工作。

多车环境下可能产生的雷达干扰现象
先说结论,当道路上多辆自动驾驶汽车同时运行、各自发射毫米波信号时,还真会出现雷达互相干扰的情况。这些干扰可分为两类,即杂波(拒绝式)干扰和欺骗式干扰。
杂波干扰指的是一个雷达接收到了其他雷达发射的强信号,从而提高了本底噪声。如当两辆车迎面而行时,如果它们的雷达信号在时间上不重叠但处于同一频段,强烈的干扰信号就会抬高受害雷达的噪声底线,导致一些小目标(雷达散射截面小的物体)消失在噪声中。
那什么是欺骗式干扰呢?如果两个雷达的波形恰好在时间上同步,但存在微小的延迟,就会在一定的距离处产生欺骗性假目标,使雷达认为前方有一个并不存在的障碍物。此外,在密集路况下,多个雷达工作频带重叠也会导致信号叠加,使雷达产生误判或漏判。总之,多车环境下的雷达干扰包括底噪抬升、虚假回波和重叠信号等现象,这些都可能让雷达误把其他车辆的信号当成目标回波或忽略真实目标。

干扰会带来什么问题?
雷达干扰会直接影响自动驾驶系统对环境的判断能力。由于噪声抬升或假目标的出现,雷达可能漏检真实障碍物,也可能对虚假目标作出反应。具体表现在几个方面,车辆对真实车辆、行人或障碍物的探测距离变短,动态检测范围缩小;同时出现误报警或忽警的情况。这些干扰将严重降低系统的可靠性和安全性。就曾有一项测试,研究人员利用干扰设备干扰特斯拉汽车前向雷达,使车辆在距离一堆泡沫障碍物约5米时“看不见”前方物体,没有及时刹车而加速撞上了障碍物。该事件表明,一旦雷达丧失目标感知能力,自动驾驶辅助系统就可能失灵,带来严重的安全隐患。

当前主流厂商的应对方案
针对毫米波雷达互相干扰的问题,芯片厂商和整车厂商已经提出了多种缓解策略。一种常用做法是在发射参数上随机化,比如随机改变雷达的啁啾信号斜率或起止频率,以减少不同车辆雷达信号偶然同步的概率;还可以对可用频谱进行分配,使周围雷达尽量在不同频率段工作。在硬件上,使用更窄的天线波束和电子扫描也能降低干扰风险,因为窄波束会减少接收到旁瓣干扰的机会。在信号处理方面,也在利用高级算法来识别和去除干扰。如短时傅里叶变换(STFT)等时频分析方法可以将雷达回波分解到时频域,从而更容易滤除快速变化的干扰信号;而对发射的FMCW波形进行相位编码可以利用独特的码序特征来抑制假目标,使雷达对欺骗式干扰具有更强的抵抗力。除此之外,车载雷达系统通常与摄像头、激光雷达等传感器融合使用,当雷达数据不确定时可以借助其他传感器进行交叉验证,从而提升整体感知的鲁棒性。
国内外厂商也在积极布局更高性能的毫米波雷达以提升抗干扰能力。特斯拉在其HW4.0硬件平台中重新加入了高精度4D成像毫米波雷达,以增强对障碍物的识别能力。国内诸如小鹏、理想、蔚来等车型已经普遍采用多颗雷达的组合方案提升环境感知。此外,还有越来越多包括大陆、采埃孚、博世、安波福等传统Tier1,以及Waymo、Mobileye、华为等自动驾驶解决方案提供商等推出4D毫米波雷达产品(如华为4D成像雷达采用12T24R阵列,可实现高分辨率广视角探测),从而确保感知的精确性。还有很多研究提议通过标准化协议或车载通信,使雷达传感器之间实现时序或频率的协调,甚至将雷达与5G/6G通信功能融合,使车辆之间共享传感信息来避免互相干扰。

未来展望
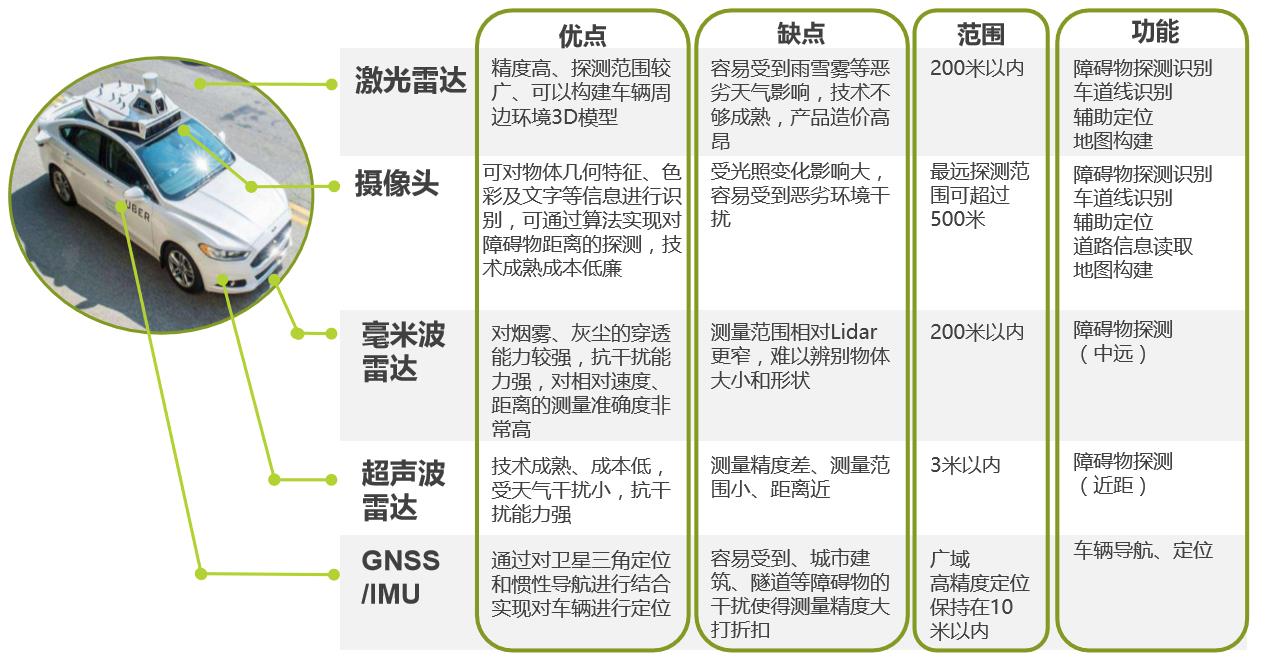
未来,毫米波雷达技术将继续向4D成像方向发展,并与其他传感器协同工作。一方面,4D毫米波雷达在传统三维信息(距离、方位、速度)的基础上增加了高度维度,可以输出类似激光雷达的点云信息。与激光雷达相比,4D毫米波雷达成本更低,且同样具有全天候工作能力(能够穿透雨、雪、雾霾),因此被视为能在更多场景下补充激光雷达的短板。另一方面,无论是顶级车企还是研究机构,都认为未来多传感器融合才是主流方向。毫米波雷达、摄像头和激光雷达各有优劣,摄像头可识别色彩与纹理,毫米波雷达在恶劣天气下稳定可靠,激光雷达提供高密度点云。几种传感器组合使用,能够相互补充。就有分析认为毫米波雷达虽然可以生成点云,但分辨率目前还难以与高线束激光雷达相比;因此毫米波雷达和激光雷达更可能互为补充,共同提升自动驾驶的安全性。总之,随着4D毫米波雷达、激光雷达和摄像头等传感器技术的共同进步,以及计算能力和算法的提升,未来自动驾驶系统的环境感知将更加精准可靠。

最后的话
毫米波雷达作为自动驾驶汽车的关键传感器,具有全天候、精准测距和速度测量的独特优势。在大量自动驾驶车辆同时运行的场景中,毫米波雷达之间的互相干扰问题确实存在,这可能导致目标探测失败或虚假目标出现,从而影响系统安全。随着毫米波雷达技术(如4D成像雷达)的升级以及相关标准的制定,多车环境下的雷达干扰风险将被进一步降低。可以预见,在自动驾驶普及进程中,毫米波雷达依然会发挥重要作用,其干扰问题虽不容忽视,但通过技术创新与产业协作是可以有效控制的。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55567浏览量
794097 -
自动驾驶
+关注
关注
795文章
15008浏览量
181647 -
毫米波雷达
+关注
关注
109文章
1176浏览量
66415
发布评论请先 登录
浅析车载毫米波雷达
毫米波雷达(一)
77G毫米波雷达在 ADAS 功能和 AD 自动驾驶中的角色和功能
毫米波/激光/超声波雷达的区别 精选资料推荐
用于ADAS系统和自动驾驶车辆中雷达的毫米波传感器
ADAS系统无人驾驶的眼睛毫米波雷达
自动驾驶使得毫米波雷达迎来百亿市场 中小厂商如何抢夺市场
脑洞大开!除了自动驾驶,毫米波雷达还能这么用!
毫米波雷达模块在自动驾驶系统中的关键功能
自动驾驶传感器中如何现在激光雷达和毫米波雷达?

毫米波雷达在自动驾驶中有何关键作用?



评论