 虹科分享 功夫机器人来了!CMG擂台之上的技术决胜点是什么?
虹科分享 功夫机器人来了!CMG擂台之上的技术决胜点是什么?

近日,全球首个以人形机器人为参赛主体的CMG世界机器人格斗擂台赛正式开战。
人形机器人化身「铁甲拳手」,精准闪避、组合连击等高难度动作频现,甚至模拟人类「鲤鱼打挺」起身。
 来源 央视新闻
来源 央视新闻
赛事采用3回合积分制,规则直指人形机器人技术核心:击中头部/躯干得分、倒地8秒未起扣分的机制,实质是对机器人动态平衡、抗冲击能力与实时响应系统的极限考验。
 来源 央视新闻
来源 央视新闻
任何通讯延迟或数据丢包都可能导致「致命踉跄」,正如网友调侃「机器人打架,拼的是背后的程序员」——而更深层的胜负关键,则是毫秒级通讯控制与多模态协同能力。
擂台之上
技术决胜的三重维度
超低延迟
格斗场景中,机器人需在0.1秒内完成「对手动作识别-路径规划-关节响应」的完整闭环。若指令传输延迟超过临界值,轻则动作滞后,重则失衡倒地。
多模态融合
视觉、力觉、关节电机等传感器数据需无缝协同。以倒地起身动作为例,某参赛机器人需调动全身29个电机进行同步控制,任何数据丢包或时序错乱都将导致动作失败。
抗干扰设计
高强度电磁干扰、连续物理冲击与电机过热等极端场景下,通讯链路稳定性直接决定机器人「生存能力」。赛场上某款「伤痕累累却运转如常」的机器人,以核心功能零故障的表现,印证了抗干扰设计在实战中的决定性作用。
虹科方案
技术赋能人形机器人应用落地
在人形机器人行业技术竞速中,虹科以深耕智能通讯领域的深厚积淀,提供全栈式解决方案。
虹科PCAN方案

虹科CAN通讯技术在人形机器人领域实现全链路支持:
▶ 传感器系统方面,通过虹科PCAN模块高效传输力、视觉、触觉及红外等多模态传感器数据至主控器,支持ECU烧写与实时信号检测,精准调试关节电机与力传感器的通信协议。
▶ 针对功能测试需求,依托CAN FD 12Mbit/s高带宽特性,同步处理机械臂轨迹数据及指尖气压、足部力扭矩传感器信息,保障长时间高负载测试不丢帧。
▶ 在执行器控制环节,中央控制器经虹科PCAN卡下发指令至执行器,凭借丰富API资源与Linux/Windows跨平台兼容性,为人形机器人的分布式控制架构提供标准化协议支持。
▶集成度高,采用M.2接口(PCIe)直接嵌入主控板(如Intel/NVIDIA),支持单/双/四通道CAN FD通信,紧凑型隔离结构保障复杂电磁环境下的高精度数据传输。
虹科EtherCAT方案
虹科EtherCAT总线方案为人形机器人领域中设备开发、数据采集、运动控制、网络诊断提供全场景技术支持与解决方案。
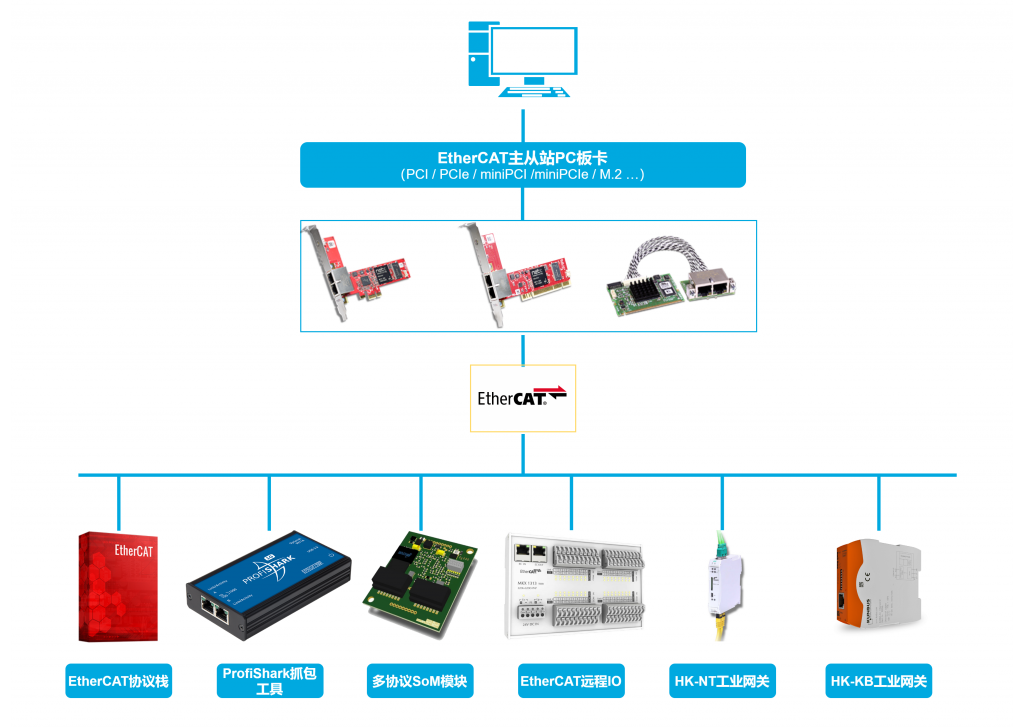
▶ 设备开发支撑方面,虹科高性能HK-OEM/SoM IoT芯片模组与EtherCAT从站软件协议栈具备开发便捷性、适配性和功能完整性等特点,为人形机器人伺服电机、传感器、编码器及末端执行器等关键零部件集成标准化EtherCAT通讯接口提供有力支持,帮助用户快速开发产品,降低开发难度与成本。
▶ 运动控制升级方面,虹科EtherCAT EEMaster主站协议栈与CIFX PC板卡,提供完整的二次开发工具包及标准化API接口,支持现有运控系统无缝迁移至EtherCAT通信协议,从而满足人形机器人分布式控制、多关节高精度协同运动的需求。
▶ 数据采集集成方面,通过虹科netTAP网关的协议转换技术,实现EtherCAT、CANopen、Modbus、串口等不同通讯接口类型设备数据融合采集,显著提升系统集成效率,构建统一的数据采集与处理平台。
▶ 网络诊断优化方面,配备HK-netANALYZER与ProfiShark便携式网络分析仪,可实时捕获解析网络报文、过程数据及通信协议事件,同步监测网络负载与抖动参数,为机器人开发提供高效现场诊断能力。
虹科机器人灵巧手
虹科Seed Robotics灵巧手兼具灵活性和可靠性,赋予机器人「仿生级」操作能力。

▶ 仿生架构:虹科RH8D(19 自由度)、虹科RH6D(15 自由度)等系列产品,通过磁性分离手指、Dyneema肌腱等创新设计,保障设备耐用性。
▶ 智能感知:集成实时高频反馈系统,可同步采集位置、速度、PWM输出和高分辨率电流测量等参数,结合电容式触摸板,为人机交互(HRI)提供多维数据支撑。
▶ 开源生态:URDF仿真模型与ROS开源包,助力开发者快速完成从算法验证到硬件集成的全流程开发,在虹科NICO开源机器人等场景中,已实现情感交互、物体识别等前沿应用。
无论是优化机器人的动态平衡算法,还是构建复杂环境下的稳定通讯链路,虹科都能够依托成熟的产品矩阵与定制化开发能力,为您提供从通讯协议优化到整机控制的全流程技术支持,让科技想象落地为可信赖的解决方案。
若您正面临人形机器人领域的开发测试难题,欢迎联系虹科,为您提供成熟方案与定制化支持。
审核编辑 黄宇
-
CAN
+关注
关注
59文章
3097浏览量
473509 -
通讯技术
+关注
关注
1文章
95浏览量
14615 -
人形机器人
+关注
关注
7文章
1056浏览量
18544
发布评论请先 登录
从“秧歌”到“功夫”,解锁春晚机器人背后的核“芯”密码
虹科动态 | 华工MBA校友一行走进虹科,对话多领域技术底座

如何实现机器人的精准控制?虹科PCAN-M.2 接口卡高效赋能人机交互
Neway电机方案在机器人技术方面的优势
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
最新发布!泰科机器人发布首款自研双足人形机器人

虹科动态 | 2025年8月精彩回顾

会议回顾丨虹科汽车×AI×机器人技术研讨会圆满落幕!
虹科动态 | 广东省机器人协会一行走访虹科,共探机器视觉新未来



评论