 步进电机的 LabVIEW 控制与应用
步进电机的 LabVIEW 控制与应用

步进电机的 LabVIEW 控制与应用
本文介绍了树莓派 RP2350 开发板使用 LabVIEW 上位机串口发送指令,实现步进电机 单步 和 连续 旋转指定角度的项目设计。进一步结合具体的应用场景,设计了开发板与仪器的联合调用、进而实现数据自动采集的应用案例。
项目介绍
在前面关于串口发送 json 指令使 RP2350 通过 ULN2003 驱动 28BYJ-48 步进电机旋转指定角度的项目设计的基础上,使用 LabVIEW 上位机串口发送指令,实现步进电机旋转指定角度。
LabVIEW 介绍
LabVIEW (Laboratory Virtual Instrument Engineering Workbench)是 National Instruments(NI)公司开发的一种图形化编程语言。主要用于数据采集、仪器控制、工业自动化以及测试测量系统的开发。
关键组件
- 前面板(Front Panel)
用户交互界面,包含按钮、图表、指示灯等控件。 - 程序框图(Block Diagram)
图形化编程区域,通过连线连接函数、结构和子VI。 - VI(Virtual Instrument)
LabVIEW程序的基本单元,每个VI包含前面板和程序框图,可嵌套使用。 - 工具包与模块
- DAQmx :数据采集驱动;
- Vision Development Module :机器视觉处理;
- LabVIEW NXG :新一代Web化设计工具。
详见:[艾默生旗下测试和测量系统 - NI] .
环境配置
下载并安装最新完整版 [LabVIEW] ;
安装时注意 VISA 串口驱动器的安装,后续测试将调用该模块。
工程设计
介绍了 LabVIEW 软件工程创建与程序设计的流程,实现上位机编写、旋转角度的串口发送、状态显示等。
1 单步控制
功能实现
- 串口发送 json 格式的角度值;
- 打印发送和接收的数据至前面板;
- 显示旋转状态(静止或运动)等。
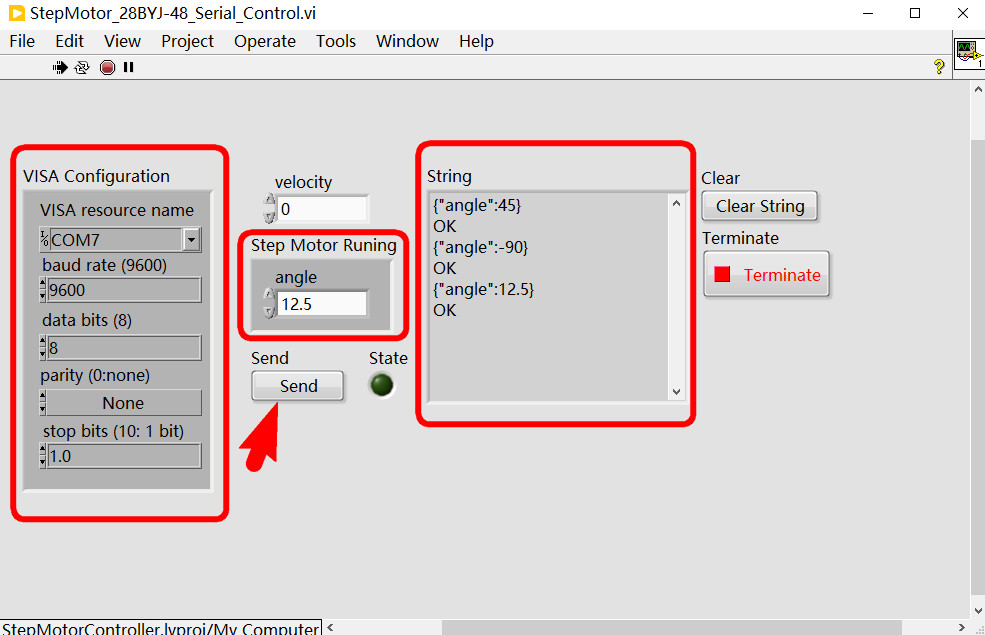
前面板
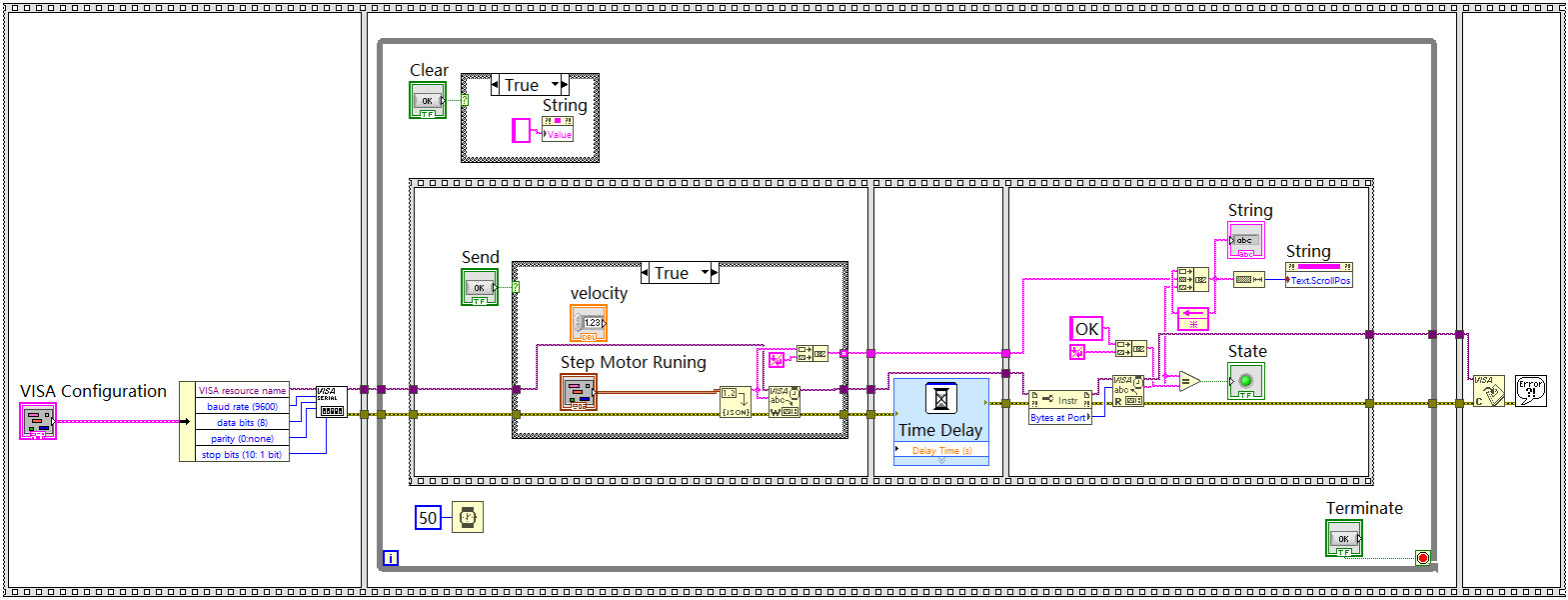
程序框图
功能实现
程序使用步骤
- 选择目标串口对应的端口号,配置波特率等信息;
- 点击运行按钮,自动打开串口;
- 输入目标旋转角度值,点击
Send发送按钮; - 字符面板显示发送和接收的信息;
State指示灯将在完成旋转任务后(收到OK)闪烁一次;
参考:[Labview 自动化测试信息转JSON字符串] 、[基于LabView开发的串口助手] 、[利用VISA进行串口通信]
2 连续控制
在实现单步控制的基础上,介绍了循环发送旋转角度指令,进而实现连续旋转的控制。
子VI定义
为了方便连续控制并旋转指定角度,采用模块化设计,定义步进电机旋转子 VI 程序。
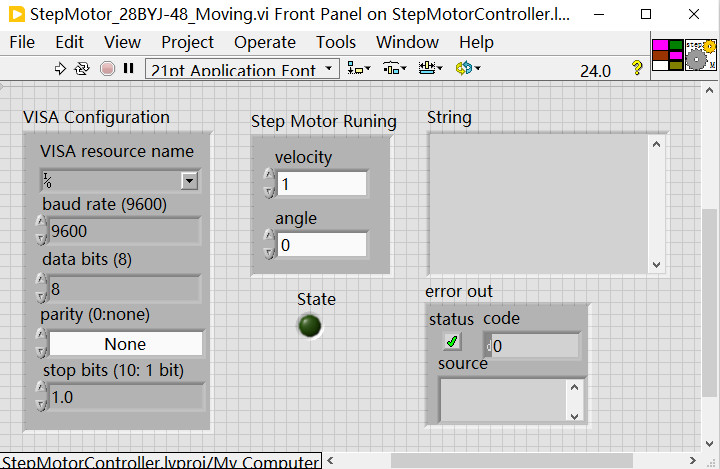
前面板
程序框图

功能实现
- 输入端口:串口配置参数 (波特率等)、步进电机的旋转速度
velocity和目标旋转角度angle; - 运行程序;
- 待检测到串口反馈回 OK 字样,表明任务执行完毕;
- 打印字符串,点亮
State状态指示灯。
连续运行
利用模块化设计的旋转子 VI 程序,结合 while 循环实现连续旋转控制。
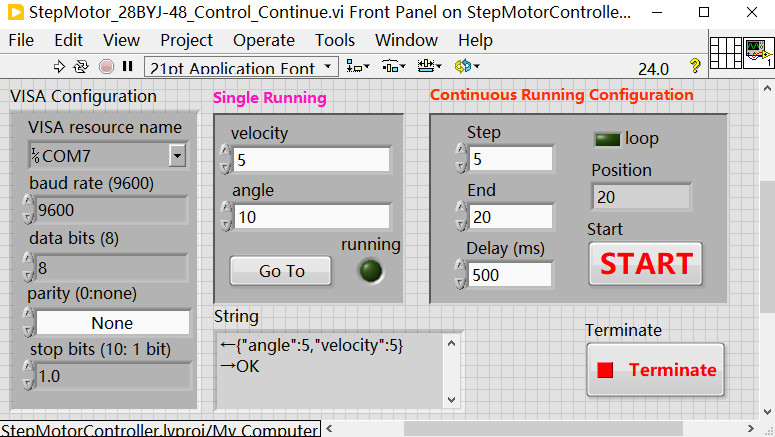
前面板
程序框图
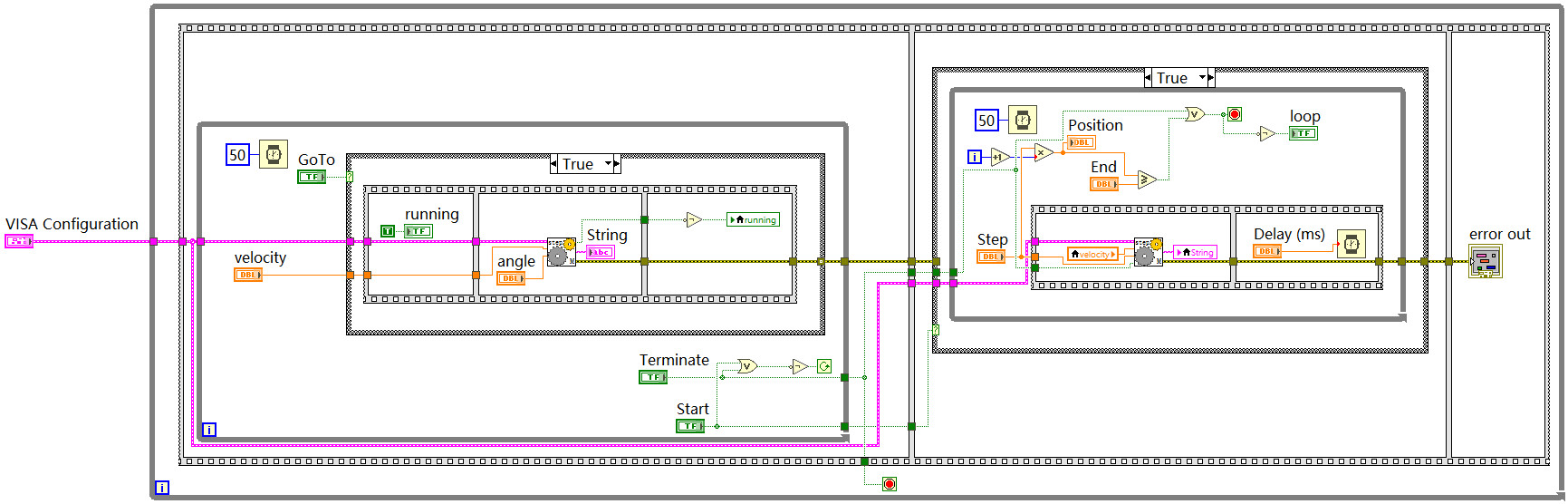
功能实现
- 串口配置参数 (波特率等);
- 运行程序;
- 单步运行:
- 输入旋转速度
velocity和目标旋转角度angle; - 点击
Go To按钮; - 待字符串面板显示 OK ,完成单步运行流程 .
- 输入旋转速度
- 连续运行:
- 在步长
Step(单次旋转的角度)、最终需要的角度值End、延时Delay栏分别输入对应的数值; - 点击
START按钮,开始运行程序; Position显示当前位置、loop 指示灯显示连续运行状态,同时输出提示字符串;- 待循环结束,到达目标角度,loop 指示灯熄灭,表明连续运行结束。
- 在步长
- 点击
Terminate按钮终止程序。
应用案例
介绍了开发的 LabVIEW 上位机步进电机控制系统 的应用案例。
案例一:自动数据采集装置
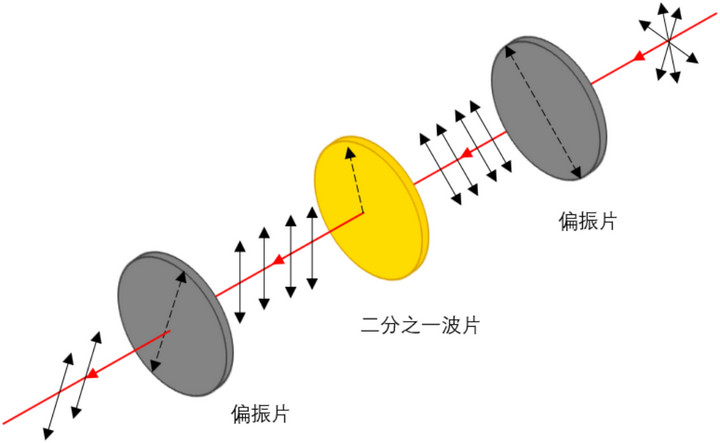
实验中通常使用二分之一波片或中性密度滤光片(Neutral Density, ND)实现光束的强度和光功率的调节。
也可以通过旋转起偏器或检偏器实现光强的精细调节
参考:[二分之一波片的四种用法]
方案介绍
使用 LabVIEW 上位机通过串口向单片机循环发送指令,精确控制步进电机的旋转角度,进而机械驱动波片旋转,实现光强的精确控制。
介绍了两种实现光功率调节的方案,分别是采用二分之一波片和 ND 滤波片的解决方案。
工作原理
介绍旋转二分之一波片实现光强控制的基本原理。
马吕斯 (E. L. Malus) 定律
I = I_0cdot cos^2{theta}
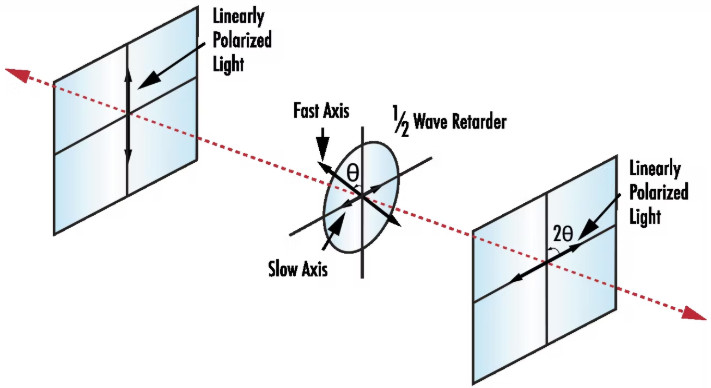
结合本项目设计,使用 LabVIEW 控制单片机驱动步进电机,进而旋转波片,实现光强的精确控制。
中性密度滤光片
ND 滤光片大致分为两种
- 不连续变化

详见:[Round, Step-Variable, Metallic Neutral Density Filters]
- 连续变化

详见:[Round Continuously Variable Metallic Neutral Density Filters] .
两种滤波片均可通过控制旋转角度,调整光斑入射至 ND 的相对位置,进而实现光强的精确调控。
数据采集
实验室中的光强数据采集通常由 光敏探头 结合 光功率计 完成

参考:[Power Meter Kits - Thorlabs]
或使用光电探测器(PD)、雪崩探测器 (APD)、光电倍增管 (PMT)、CCD 传感器等。

参考:[平衡光电探测器] 、[光电倍增管] 、[雪崩光电二极管] 、[CCD]
这里使用混入噪声的锯齿波模拟旋转 ND 时,光强信号的变化。
项目工程
介绍了 LabVIEW 上位机联合调用设备实现自动化数据采集的项目设计,包括面板设计、程序框图、功能实现等。
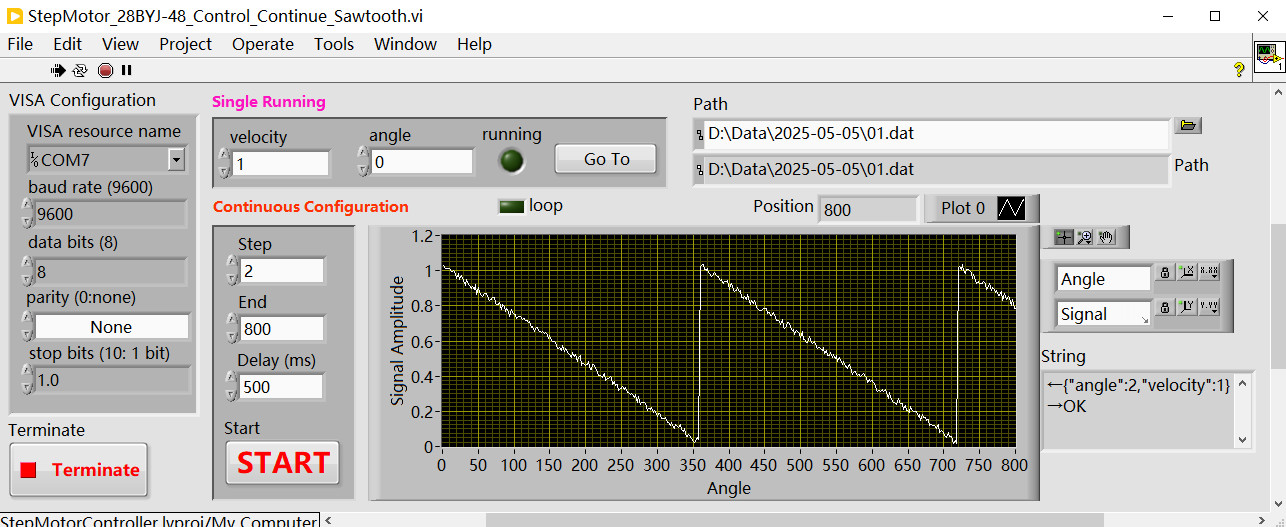
前面板
程序框图
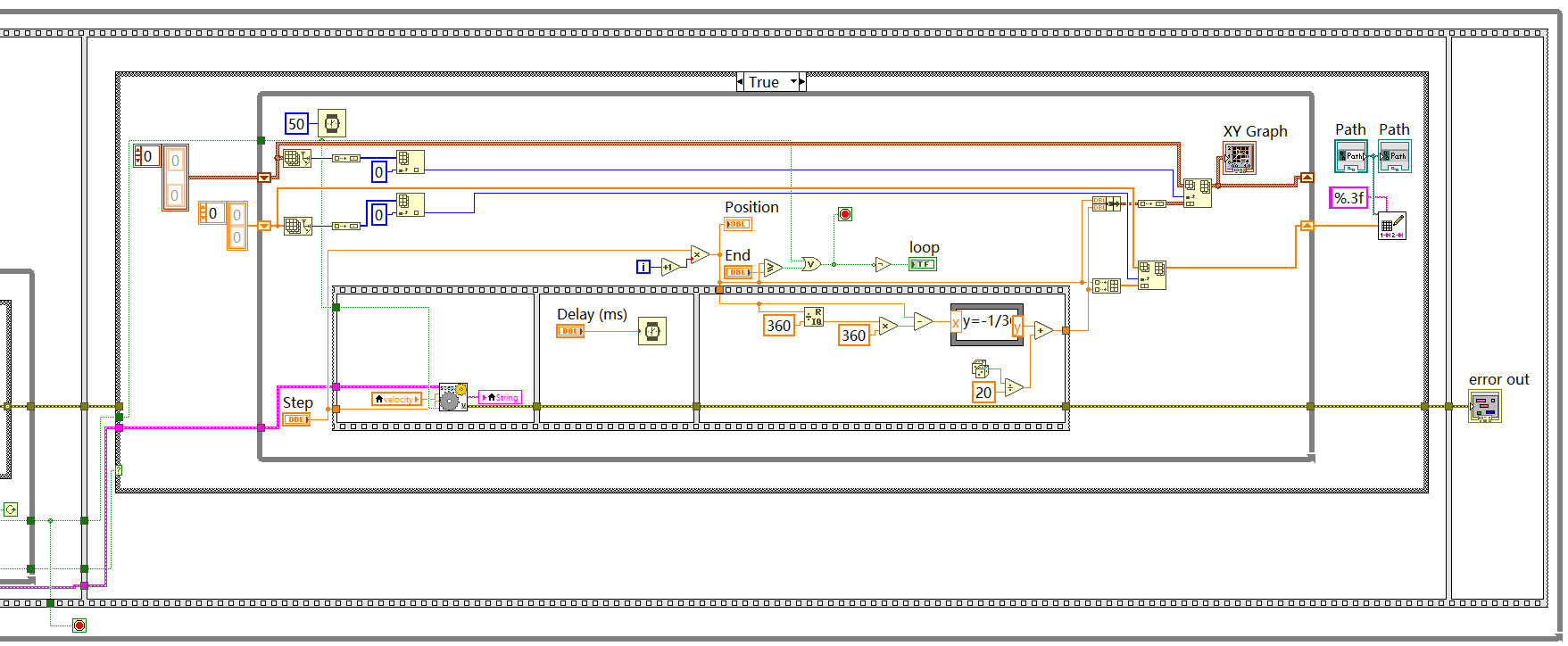
功能实现
- 选择目标串口对应的端口号,配置波特率等信息;
- 点击运行按钮,自动打开串口;
- 单次运行:
(a)输入目标旋转角度值;
(b)点击Go To按钮,字符面板显示发送和接收的信息;
(c)Running指示灯显示旋转状态(运行时点亮,静止时熄灭); - 连续运行:
(a)输入步长、目标角度、延时、文件保存路径;
(b)点击START按钮开始运行;
(c)实时显示位置、循环状态、提示字符串;
(d)显示数据与角度演化曲线;
(e)运行结束后,曲线数据自动保存至目标路径。 - 点击
Terminate按钮终止程序。
效果演示
参数配置完成后点击 START 按钮运行程序
数据保存样式
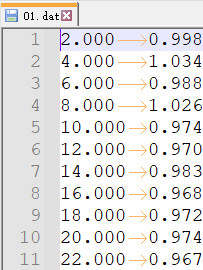
至此完成了 RP2350 开发板结合 LabVIEW 上位机实现自动数据采集的项目。
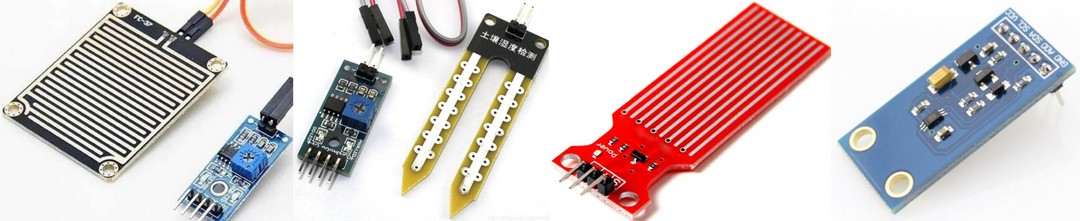
案例二:自动雨刷(自动撑伞装置、自动浇水器、自动换水鱼缸)
结合雨滴传感器、土壤湿度传感器、水位传感器、光强传感器等,当检测到传感器模拟信号变化或达到阈值,旋转步进电机实现力矩传递和机械驱动目标装置,实现摆动、进动、旋动、开关等操作,自动完成设定任务。
总结
本文介绍了 DFRobot Beetle RP2350 开发板使用 LabVIEW 上位机串口发送指令,实现步进电机 单步 和 连续 旋转指定角度的项目设计。
进一步结合具体的应用场景,设计了开发板与仪器的联合调用、进而实现数据自动采集的应用案例。
结合其他应用场景,有针对性地提出了工程设计思路与解决方案。
上述系统性的测试为电机驱动等相关类似项目提供了新思路,也为该型号开发板的应用提供了具有 LabVIEW 上位机控制的一系列有价值的参考。
审核编辑 黄宇
-
LabVIEW
+关注
关注
2025文章
3692浏览量
349486 -
步进电机
+关注
关注
153文章
3278浏览量
152969
发布评论请先 登录
步进电机控制方案中驱动板的核心作用与技术解析
步进电机的位置控制与速度控制

多功能步进电机驱动控制板设计:适配多场景的集成化方案
步进电机驱动器的作用介绍

步进电机发热问题及对策
Trinamic步进电机驱动芯片有哪些优点?

DRV8821 双路步进电机控制器与驱动器技术文档总结
DRV8711 步进电机控制器技术文档总结





评论