 mpu6050航向角漂移很严重的原因及解决方法
mpu6050航向角漂移很严重的原因及解决方法

给大家简单分析一下MPU6050 航向角漂移严重的原因及解决方法
MPU6050 航向角漂移严重的原因分析
- 传感器自身特性
- 陀螺仪漂移 :陀螺仪测量角速度,通过积分得到角度,但积分过程中,即使角速度为零,由于陀螺仪的噪声、温度变化等因素,也会产生微小的角速度输出,积分后导致角度漂移。
- 加速度计误差 :加速度计可辅助测量角度,但受振动、重力加速度变化等影响,输出存在误差。当用加速度计数据修正航向角时,这些误差会间接导致航向角漂移。
- 外部环境因素
- 系统设计与算法问题
- 采样频率低 :若采样频率过低,在两次采样间隔内,传感器可能已经发生了较大的角度变化,导致积分计算时丢失部分角度信息,累积起来造成明显的航向角漂移。
- 滤波算法不佳 :如果滤波算法选择不当或参数设置不合理,无法有效滤除传感器噪声和干扰信号,会使测量数据波动较大,表现为航向角漂移。
- 未校准或校准不当 :MPU6050 在使用前需要进行校准,以消除传感器的零偏、比例因子误差等。未进行校准或校准不准确,会使测量的初始值就存在偏差,随着时间推移,漂移现象会越来越严重。
MPU6050 航向角漂移严重的解决方法
- 硬件方面
- 温度补偿 :可增加温度传感器,实时监测环境温度,根据温度与航向角漂移的关系,在软件中进行温度补偿计算。
- 电磁屏蔽 :将 MPU6050 模块用金属屏蔽罩进行屏蔽,并良好接地,减少外部电磁干扰。同时,合理布线,避免传感器的信号线与强电线路平行敷设。
- 减震措施 :使用减震材料,如橡胶垫、海绵等,将 MPU6050 与设备的安装部位隔开,减少振动传递。
- 软件方面
- 提高采样频率 :在硬件资源允许的情况下,适当提高 MPU6050 的采样频率,使积分计算更精确,减少角度信息的丢失。
- 优化滤波算法 :采用卡尔曼滤波、互补滤波等先进的滤波算法,根据具体应用场景,合理调整滤波参数,有效滤除噪声和干扰信号。
- 校准与标定 :在使用前对 MPU6050 进行严格的校准,包括零偏校准、比例因子校准等。还可以定期进行校准,以适应环境和设备状态的变化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
陀螺仪
+关注
关注
44文章
873浏览量
101094 -
MPU6050
+关注
关注
39文章
310浏览量
74481 -
航向角误差补偿
+关注
关注
0文章
2浏览量
2983
发布评论请先 登录
相关推荐
热点推荐
用dma加iic读取mpu6050数据遇到的疑问求解
我在用dma加iic读取mpu6050数据时,试着用dma传输4个数,但是用freemaster查看数据以后,发现只有数组里面的第一个数有值,其他的都为0,而且发现没进dma传输完成中断,把传输数量改成1以后,就能进入dma传输完成中断,就好像dma只能传输一个数一样,有没有大佬知道这是怎么回事啊
发表于 12-09 07:41
STM32+DP83848跑10M可以,100M丢包很严重,请问有人遇到过吗?
大佬们,stm32驱动dp83848,跑10M可以,100M丢包很严重,请问有人遇到过吗
发表于 08-20 10:04
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据
本示例将演示使用 DMP6 从 MPU6050 获取数据。MPU6050 配备了数字运动处理器 (DMP),用于处理运动算法的计算,如转换为三轴偏航/俯仰/滚动平面、转换为四元数或转换为欧拉角。
求助,关于ST的IMU和地磁计用motionfx库融合后航向角异常的问题求解
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北
发表于 06-10 07:19
ST的IMU和地磁计用motionfx库融合后航向角异常的原因?
传感器IMU是LSM6DSL型号,磁强计是LIS3MDL型号,使用motionfx库进行姿态解算,遇到航向角不准确的问题。我查看地磁计的值是正常的,但是航向角不正常:例如传感器指向正北
发表于 04-23 08:11
STM32F103对ADS1298和MPU6050同时采集数据会出现ADS1298数据丢失
你好,请问我用STM32F103对ADS1298和MPU6050同时采集数据为何会出现ADS1298数据丢失,而单独对期中任何一个传感器单独进行数据采集就没有任何问题
发表于 03-22 17:29
关于mpu6050问题
我很早之前买了一个,我现在使用这个mpu6050,我在调mpu6050数据时候,数据抖动特别大,我没动这个mpu6050,它自己都有抖动,然后本来放在水平,他的机械中值是2.5,但是我水平抖动后,机械中值突然变成了-258,这是
发表于 03-09 17:17
零知开源——ESP8266+MPU6050 实现运动姿态检测
Wi-Fi模块,可以实现数据无线传输,将姿态数据上传至服务器或云端,便于实时监测。 然而,MPU6050 没有磁力计,直接使用陀螺仪的角速度积分计算yaw角(航向角)会导
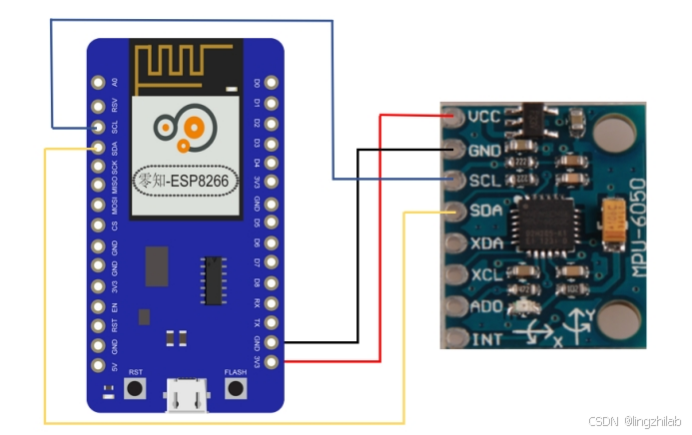
零知开源——ESP8266+MPU6050 实现运动姿态检测
,可以实现数据无线传输,将姿态数据上传至服务器或云端,便于实时监测。
然而,MPU6050 没有磁力计,直接使用陀螺仪的角速度积分计算yaw角(航向角)会导致累积
发表于 02-20 17:44
零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
零知增强板I2C通信 本教程将指导您如何使用零知增强板与MPU6050六轴传感器模块进行交互。MPU6050是一款含有三轴加速度计和三轴陀螺仪的传感器,能够测量设备的倾斜情况和旋转
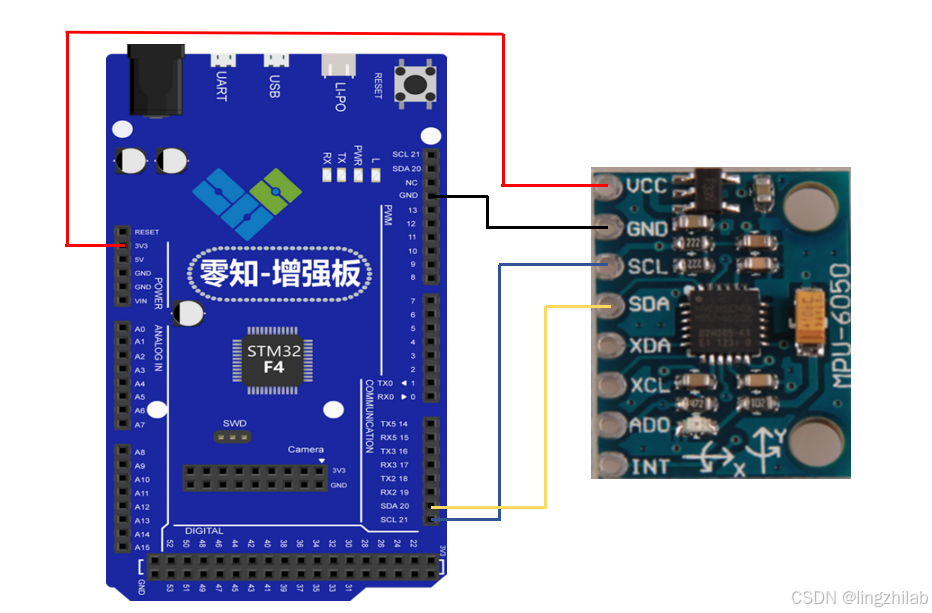
零知开源——MPU6050六轴传感器模块实践教程,轻松实现运动检测!
本帖最后由 PCB56242069 于 2025-2-20 17:27 编辑
零知增强板I2C通信
本教程将指导您如何使用零知增强板与MPU6050六轴传感器模块进行交互
发表于 02-20 15:53
使用ADS1298采集的心电信号已经可以显示出来,只要测试时呼吸咳嗽时心电的基线漂移会很严重,如何解决?
使用ADS1298采集的心电信号已经可以显示出来,但是只要测试时呼吸咳嗽时 心电的基线漂移会很严重,另外会有50hz的工频干扰请问如何解决这些问题
发表于 02-13 06:33
ADS1298在采集心电信号时出现了很严重的工频干扰,每个通道都有,而且相对于心电信号来说非常大,怎么解决?
在采集心电信号时出现了很严重的工频干扰,每个通道都有,而且相对于心电信号来说非常大,心电信号几乎埋没了。求如何解决这个问题
发表于 02-12 08:37
ADS1292采集到的信号的波形,50Hz的干扰很严重怎么解决?
ADS1292采集到的信号的波形如下:
但是50Hz的干扰很严重,已经加了右腿驱动了,还能看到明显的干扰。
请问如何把这个干扰滤除?
是需要采集之后做数字滤波吗?有没有数字滤波的算法供参考一下?
发表于 02-05 08:05





 工商网监
工商网监
评论