 如何选择并整合多维安全系统来保护工人免受协作机器人伤害
如何选择并整合多维安全系统来保护工人免受协作机器人伤害

作者:Jeff Shepard
投稿人:DigiKey 北美编辑
2024-11-13
在工厂和物流设施中部署协作机器人、自主移动机器人 (AMR) 和自动导引车 (AGV) 时,安全至关重要。这是一个复杂、多维的系统,
需要根据国际标准化组织 (ISO) 13849、国际电工委员会 (IEC) 62061 和 IEC 61800-5-2 标准对机器移动进行监测和控制,而这些标准为控制系统 (SRP/CS) 安全相关部件的设计和整合原则提供了安全要求和指导。
要确保协作机器人、AMR、AGV 和类似设备的安全运行,通常需要建立一个分层的安全围护结构,涉及从最初的物体检测和接近警告,到识别物体何时进入危险区域并停止机器等多个领域。
模块化安全控制器系统可增加另一层分析和保护功能。在处理保护区域中断和扫描仪意外跳断时,高效、快速的故障分析是一个重要的考虑因素。这就需要第二个传感器来监测主传感器的保护区域。
本文首先简要介绍了 ISO 13849、IEC 62061 和 IEC 61800-5-2 标准的要求,并回顾了二维 (2D) 光探测和测距 (LiDAR) 安全激光扫描仪的基础知识。然后,深入探讨了如何实现分层安全围护,以保护人们免受协作机器人、AMR、AGV 和类似设备的伤害。
其中包括对 2D LiDAR 的使用和整合的回顾,将这些传感器与模块化可编程安全控制器相结合以提供额外层面的安全防护,以及使用事件相机对保护区域意外中断进行故障分析。其间会介绍来自 [SICK] 的实例器件。
IEC 61508 是“电气/电子/可编程电子安全相关系统(E/E/PE 或 E/E/PES)功能安全”标准的基础标准,适用于所有行业。此外,还有针对特定行业和应用的分支和变体标准。
IEC 62061 “机械安全:电气、电子和可编程电子控制系统的功能安全”是 IEC 61508 的机械专用变体标准。IEC 61800-5-2“可调速电力驱动系统 – 第 5-2 部分:安全要求 – 功能”也与 IEC 61508 有关,是设计和开发可调速驱动系统的标准。
ISO 13849 是独立开发的,并非源自 IEC 61508。两者都涉及功能安全。IEC 61800-5-2 使用安全完整性等级 (SIL) 来定义安全要求,而 ISO 13849 则定义了所需的性能等级 (PL r )。
ISO 13849 和 IEC 61508 基于每小时危险故障概率 ( PFHd ) 概念。ISO 13849 功能安全分析考虑三个因素:可能造成伤害的严重程度、危险发生的频率或暴露程度以及限制危险和避免伤害的可能性(图 1):
- 伤害严重程度
- S1:轻微(通常是可逆转的损伤)
- S2:严重(通常为不可逆转或死亡)
- 发生危险的频率和/或暴露程度
- F1:几乎不到很少和/或暴露时间短
- F2:频繁到持续和/或曝露时间长
- 避免危险或限制伤害的可能性
- P1:在特定条件下可能
- P2:几乎不可能
 图 1:ISO 13849 中 PL
图 1:ISO 13849 中 PLr 级别和 IEC 62061 中对应 SIL 等级的推导。这两个标准都基于每小时危险故障 (PFH d ) 的概念。(图片来源:SICK)
LiDAR 工作方式?
在个人防护应用中使用 2D LiDAR 安全传感器需要通过 ISO 13849 的 PLb 认证。[TiM 2D LiDAR 传感器](系列包括符合这一要求的型号。2D LiDAR 传感器利用光学飞行时间 (ToF) 技术扫描周围环境。ToF 是通过使用旋转镜发送激光脉冲并检测反射光来实现的。反射光到达传感器的时间越长,说明物体距离越远。
时间测量与返回信号的强度相结合,能够让传感器以毫米级精度计算多个物体的位置。由此产生的环境图像每秒可最多更新 15 次(图 2)。它可以支持实时导航、定向、控制和安全功能。
 图 2:TiM 2D LiDAR 传感器使用旋转镜和激光脉冲来生成周围环境图像,每秒最多可更新 15 次。(图片来源:SICK)
图 2:TiM 2D LiDAR 传感器使用旋转镜和激光脉冲来生成周围环境图像,每秒最多可更新 15 次。(图片来源:SICK)
TiM 2D LiDAR 传感器可探测到所要监控的指定区域(场)内的物体。根据型号的不同,扫描范围可达 25 米,工作范围可达 270°。
激光器返回的脉冲数据采用高分辨率距离测量 (HDDM) 或 HDDM+ 技术进行处理。HDDM 可在短距离内实现极高的测量精度,适用于像对接操作之类应用中的精细定位。HDDM+ 对边缘反射的处理能力特别强,因此最适合动态环境中的定位和防碰撞应用。
在这两种情况下,获得专利的 HDDM/HDDM+ 多脉冲技术使得 TiM 2D LiDAR 传感器能够无间隙地探测整个扫描范围,确保稳定的测量精度,并且能够处理不同的表面和折射因子。
TiM1xx、TiM3xx 和 TiM7xx 型器件可检测对象是否在预定义的区域中。16 个区域组,每个组有 3 个预先配置的区域,支持在运行过程中快速调整(图 3)。可以指定单个区域的几何形状,也可以为静态轮廓监测定义参考轮廓区域。还可以定义数字筛选条件、遮蔽区域和响应时间,即使在大雨、大雪或灰尘的情况下也能最大限度地提高性能。
 图 3:TiM 2D LiDAR 传感器中的区域组由三个预先配置的区域组成。(图片来源:SICK)
图 3:TiM 2D LiDAR 传感器中的区域组由三个预先配置的区域组成。(图片来源:SICK)
可提供区域评估数据或区域评估和测量数据的型号。区域评估传感器只能确定物体是否存在,而区域评估和测量数据则可用于提供扫描表面的准确图像。
除距离数据外,TiM 2D LiDAR 传感器还可提供角度数据和接收信号强度指示 (RSSI) 输出。这一扩展数据集尤其有助于 AMR 在不断变化的环境中避撞和导航。
安全 LiDAR ,增加第一道保护层
TiM 2D LiDAR 系列拥有与安全相关的变型 TiM361S(区域评估)和 TiM781S(区域评估和测量数据输出),符合 PLb 的要求,可用于固定和移动应用。在工业协作机器人的出入监控以及 AMR 和 AGV 等移动平台上,它们可用于个人保护。
- [TIM361S-2134101] 类型(型号 1090608)适合室内使用,探测范围 0.05 至 10 米,采用 HDDM 技术。
- [TIM781S-2174104] 类型(型号 1096363)也适合室内使用,探测距离为 0.05 至 25 米,采用 HDDM+ 技术。
简化整合
TiM 2D LiDAR 传感器旨在简化整合。外壳防护等级高至 IP67,灰尘和湿气都无法进入。它们对高达 80,000 lx 的明亮环境有很强的免疫力。其坚固耐用的设计符合 IEC 60068-2-6 的抗震要求和 IEC 60068-2-27 的抗冲击要求。必要时,还可为保护板增加阻尼固定装置来增强其坚固性。
TiM 2D LiDAR 传感器设计紧凑、重量轻、功耗低,非常适合移动平台。TIM361S-2134101 类型和 TIM781S-2174104 类型的重量都只有 250 克,典型功耗为 4 W,尺寸为长 60 mm x 宽 60 mm x 高 86 mm。
安全控制器再添另一重保障
LiDAR 激光扫描仪可探测危险并发出警报,而模块化安全控制器则可为保护系统增加另一层安全。例如,Flexi Soft 安全控制器就是一个模块化系统,可连接各种传感器和开关元件,包括激光扫描仪。根据 IEC 61508 标准,它被评为 SIL3 级;根据 ISO 13849 标准,它被评为 PLe 级,PFHd 为 1.07 x 10- ^9^ 。
一个基本系统至少由两个模块组成(图 4):
- CPU0(如 [1043783] 型号)是中央逻辑单元,用于分析和评估来自 LiDAR 等传感器的信号,从而分担了中央机器控制器的安全分析工作。CPU0 的输出端与更高级别的机器控制装置(如可编程逻辑控制器 (PLC))相连,并在通过控制器实现安全功能。
- 将激光扫描仪连接到系统需要 XTIO I/O 扩展模块,如 [1044125] 型号。每两台激光扫描仪需要一个 XTIO I/O 扩展模块,因为每台激光扫描仪使用三个开关输入。控制器最多可操作 12 个 I/O 模块。
 图 4:Flexi Soft 安全控制器系统由一个 CPU 模块 (1) 和一个或多个 I/O 模块 (2) 组成。(图片来源:SICK)
图 4:Flexi Soft 安全控制器系统由一个 CPU 模块 (1) 和一个或多个 I/O 模块 (2) 组成。(图片来源:SICK)
发生了什么?
安全系统的一个重要环节是分析和了解任何故障根本原因的能力,也就是能够回答“发生了什么导致安全激光扫描仪触发?”这个问题。SICK 的 EventCam 事件相机专门用于检测和分析工业环境中的偶发故障。
EventCam 自带光学、照明、电子和存储装置,可整合到移动或固定系统中。铸铝外壳的防护等级为 IP65,可安装在各种不同的位置。EventCam 可连接到像安全控制器这样的自动化系统或直接连接到传感器。
一旦报告了错误,EventCam 就会开始存储单帧或视频序列。内部边写边擦存储器最多可存储事件发生前 240 秒和事件发生后 100 秒的内容。在高清 (HD) 模式下,它最多可记录前 25 秒和后 15 秒。视频帧率 (fps) 从 13 到 65 不等,具体取决于所需的分辨率。
EventCam 在调试新机器或流程时也很有用。它可以监控无监督试运行,如多小时或多天的连续试验,并快速识别错误源。多个 EventCams 可以监控一个流程,同时从多个角度提供可视信息,以便对错误进行更深入、更全面的分析(图 5)。
 图 5:可以同步多个 EventCams,从多个角度同时记录单个事件。(图片来源:SICK)
图 5:可以同步多个 EventCams,从多个角度同时记录单个事件。(图片来源:SICK)
EventCam 有两种变型。[1102028] 型号的工作范围为 0.4 米至 0.6 米,适用于保护空间相对较小的固定式协作机器人。[1093139 型号的工作范围为 0.8 至 6 米,可适应较大的协作机器人、AMR 和 AGV 的较大保护空间。
结语
2D LiDAR 传感器(如 SICK 的 TiM 系列)可为协作机器人、AMR、AGV 和类似机器的安全系统提供第一道防线。它们提供了一系列保护区域,以监控人员的接近。安全控制器可增加另一层保护,能支持入侵分析并提高系统性能。最后,可以使用一个或多个 EventCams 相机监控主要 2D LiDAR 传感器,帮助确定任何偶发跳断的根本原因。
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55505浏览量
793961 -
AMR
+关注
关注
3文章
486浏览量
32292 -
AGV
+关注
关注
28文章
1572浏览量
43791 -
协作机器人
+关注
关注
2文章
544浏览量
31668
发布评论请先 登录
未来机器人发展关键——多传感系统
机器人VS人:替代还是协作?
如何保障桁架机器人的安全
机器人、协作机器人和移动机器人,你分的清楚吗
“协作机器人”如何快速处理传感器数据
协作机器人的起源_为什么需要协作机器人
协作机器人的优势有哪些
协作机器人是什么_协作机器人应用前景
什么是协作机器人?协作机器人如何选择
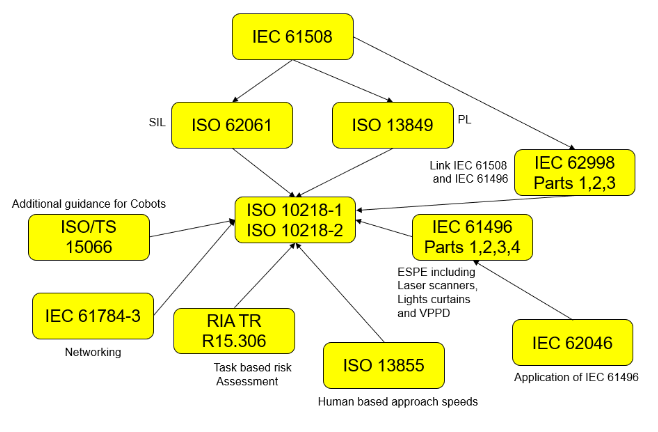
与工业机器人、协作机器人和移动机器人最相关的功能安全标准
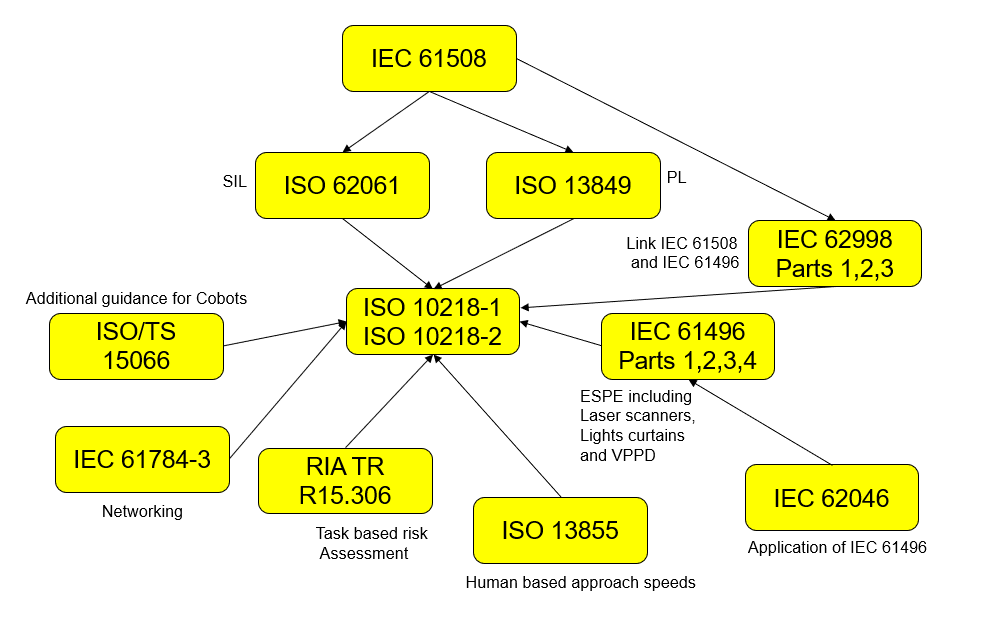
与工业机器人、协作机器人和移动机器人最相关的功能安全标准



评论