 AUTOSAR通信与CAN协议的关系
AUTOSAR通信与CAN协议的关系

AUTOSAR通信模型:
AUTOSAR定义了一个分层的软件架构,其中包括应用层、基础软件层和微控制器抽象层。在这些层中,通信模型是实现ECU之间通信的关键部分。AUTOSAR通信模型基于事件和信号的概念,允许应用层组件(如软件组件和ECU抽象层)通过定义良好的接口进行通信。
1. 通信服务:
AUTOSAR提供了一系列通信服务,包括复杂驱动通信(COM)、网络管理(NM)、诊断通信(DCM)和CAN通信(CAN)。这些服务确保了不同ECU之间数据的有效传输。
2. 信号和事件:
在AUTOSAR中,信号是ECU之间传输的数据的基本单位,而事件则是触发信号传输的机制。这种基于事件的通信模型提高了系统的响应性和效率。
CAN协议:
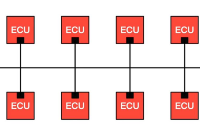
CAN协议是一种用于车辆内部网络的通信协议,它允许多个ECU通过共享的双绞线传输数据。CAN协议的关键特性包括:
1. 消息和帧:
CAN协议定义了消息和帧的概念。消息是ECU之间传输的数据包,而帧是实际在物理介质上传输的数据单元。
2. 仲裁和错误处理:
CAN协议具有基于优先级的仲裁机制,确保高优先级的消息能够优先传输。此外,它还具有强大的错误检测和处理能力,确保通信的可靠性。
AUTOSAR与CAN的集成:
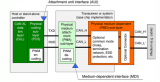
AUTOSAR通信模型与CAN协议的集成是通过AUTOSAR的CAN通信服务实现的。这个服务提供了一个抽象层,允许AUTOSAR应用层组件与底层的CAN硬件接口进行通信。
1. CAN驱动:
AUTOSAR定义了CAN驱动,这是一个软件组件,负责管理CAN硬件接口,并提供与AUTOSAR通信服务的接口。
2. CAN网络管理:
网络管理服务(NM)负责监控和管理CAN网络上的ECU状态。它确保ECU在启动时能够正确地加入网络,并在运行时保持网络的稳定性。
3. 信号和消息映射:
在AUTOSAR中,信号和事件被映射到CAN消息和帧。这种映射确保了AUTOSAR通信模型的抽象性,同时允许开发者利用CAN协议的高效性和可靠性。
案例研究:
为了更好地理解AUTOSAR通信与CAN协议的关系,我们可以考虑一个实际的案例。例如,在现代汽车中,发动机控制单元(ECU)和车身控制模块(BCM)需要频繁地交换信息。AUTOSAR通信模型允许这些ECU通过定义的接口发送和接收信号,而CAN协议则确保这些信号在物理层面上可靠地传输。
1. 发动机控制单元(ECU):
发动机ECU负责监控和控制发动机的性能。它需要从BCM接收关于车辆状态的信息,如车门是否关闭,以及发送关于发动机状态的信号。
2. 车身控制模块(BCM):
BCM负责监控车辆的车身系统,如门锁和窗户。它需要从发动机ECU接收关于发动机状态的信号,并发送关于车身状态的信号。
3. 通信过程:
在AUTOSAR通信模型中,发动机ECU和BCM定义了需要交换的信号和事件。然后,这些信号和事件被映射到CAN消息和帧。CAN协议确保这些消息在ECU之间可靠地传输。
-
微控制器
+关注
关注
49文章
8863浏览量
165681 -
通信
+关注
关注
18文章
6450浏览量
140261 -
AUTOSAR
+关注
关注
11文章
406浏览量
23754 -
CAN协议
+关注
关注
1文章
42浏览量
13208
发布评论请先 登录
工业通信升级:耐达讯自动化CAN转EtherCAT网关的高效落地方案

CAN转EtherCAT协议桥接:耐达讯自动化打破工业设备通信壁垒

CAN协议的深度剖析

机器人通信协议EtherCAT和CAN如何选择
车载以太网通信协议栈如何测?UT和SP联手!

CAN网关的协议栈架构分析及性能优化策略

直流电源的 CAN 通信设置与实践

如何实现安全的AUTOSAR通信栈
RT-Thread睿赛德正式加入AUTOSAR 组织,成为开发合作伙伴!

【干货】一文带你了解CAN、Modbus与LoRa三种通信协议的区别

CAN XL通信技术在车载毫米波雷达中的应用(2)

打破协议壁垒,CAN转EtherCAT连接工业相机秒变跨国CP”!
从手写代码到AUTOSAR工具链:J1939Tp应用篇
一文读懂CAN XL协议



评论