 XKCON祥控轨道式输煤栈桥智能机器人巡检系统解决方案
XKCON祥控轨道式输煤栈桥智能机器人巡检系统解决方案

一、背景
输煤栈桥是火电、煤矿等企业的重要燃料运输系统,其运行过程中的环境与设备等问题不容忽视。但输煤栈桥内环境复杂,人工巡检需要花费大量时间,不仅难以做到全面、及时的防控安全风险,还会对人体健康造成一定的危害。
二、系统介绍
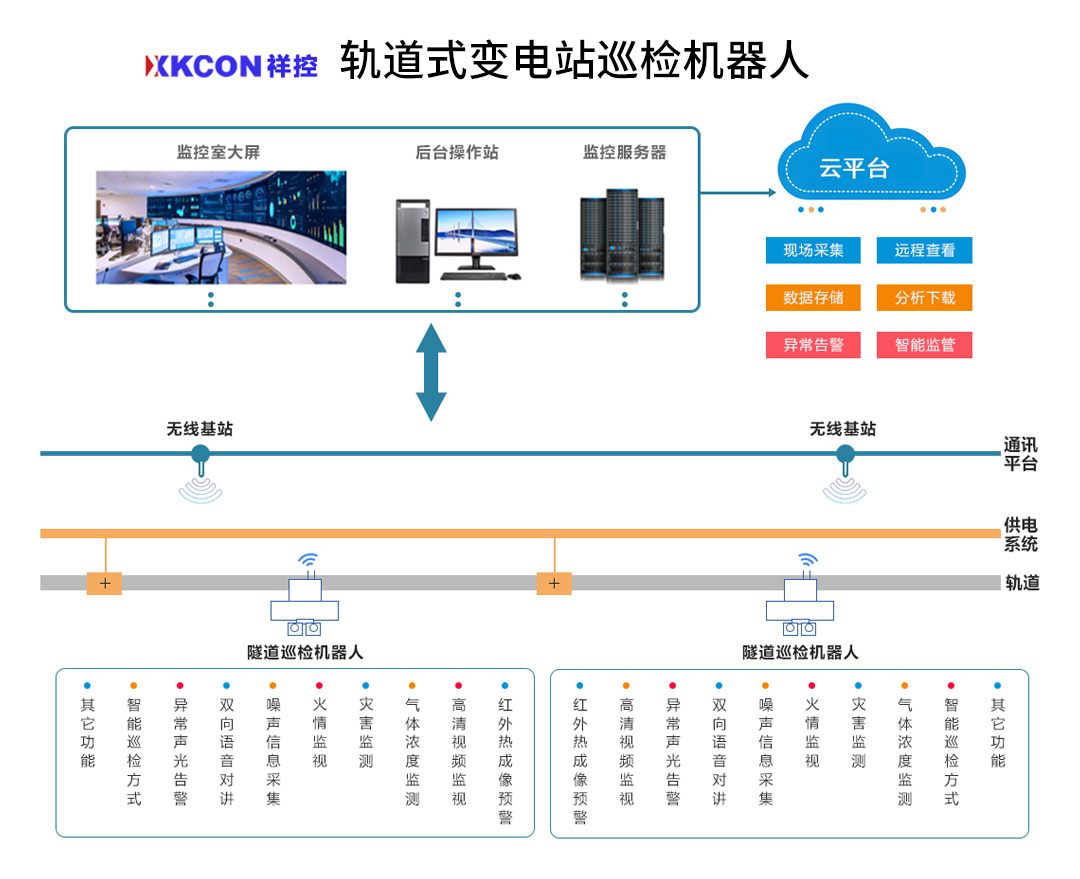
XKCON祥控轨道式输煤栈桥智能机器人巡检系统采用机器人巡检方式代替人工巡检,这种巡检方式既不影响输煤系统的正常运行,还能与人工巡检形成互补,实现24小时不间断运行,进行全方位、无死角安全巡检,有效提升栈桥输煤系统的安全系数和工作效率。
根据系统下达的任务,轨道式巡检机器人开始沿着轨道运行,通过视频巡检方式对运行中的输煤皮带进行全面检查,掌握皮带的运行情况;并通过传感器设备对输煤环境进行数据采集,然后采集到的所有数据和视频,同步回传至企业安全监控中心。
主要功能:
(1)自主巡视:机器人按照设置好的路线自动行驶开始自动巡检,并将所有数据实时上传到云平台,使工作人员可以实时监测输煤栈桥的运行情况;
(2)环境监测:机器人自带的传感器能够对输煤栈桥环境内的温湿度、煤堆温度、有毒气体浓度、煤粉实时浓度、异响等信息进行数据采集与在线监测;
(3)数据分析:通过大数据分析和深度学习算法,对输煤栈桥所有监测数据进行智能分析,判断输煤皮带的运行状态及环境各要素的实时信息,及时发现潜在隐患;
(4)异常告警:一旦检测到异常情况,如皮带跑偏、设备故障、煤粉堆积、等问题,机器人会立即发出警报,并通过远程通信系统通知相关管理人员;
(5)视频监控:系统界面清晰地显示输煤栈桥内的实时视频画面与实时红外热成像画面,并自动捕捉最高温度点,管理人员可根据需要对检测画面的点、区域进行温度分析;
(6)存储分析:自动存储所有的巡检数据和异常情况,并自动生成相关报告,为管理人员后续分析提供精确的数据支持。
XKCON祥控轨道式输煤栈桥智能机器人巡检系统支持远程人工操作和设定巡检方案两种监控方式,机器人可自动避开障碍物,对栈桥环境和皮带运输状态进行全天候、高精度远程监视,安全性高。
-
机器人
+关注
关注
213文章
31386浏览量
223540 -
巡检系统
+关注
关注
0文章
161浏览量
15646
发布评论请先 登录
隧道巡检机器人

铁路机器人用锂电池完整设计方案要求

巡检机器人联网监控在线管理系统方案

科义机器人:让工业巡检从"人海战术"转向"智能时代"
51camera隧道综合巡检机器人 全维度隧道健康管家

配电房 AI 巡检机器人系统 挂轨式移动架构 精准感知、稳定运行、智能分析

轨道式智能巡检机器人XKCON-RTI应用于变电站,对站内设备进行定期巡视和检查,及时发现隐患并报警
巡检机器人落地攻略:RK3576驱动12路低延迟视觉

高速巡检新突破:轨道扣件移位智能检测方案

XKCON祥控输煤管廊巡检机器人通过搭载的双光谱云台与各类传感器,对设备运行状态、环境参数、煤温等进行
鲁渝能源巡检机器人无线充电方案
智能电网第3期 配电房巡检机器人通信升级方案




评论