 如何提高系统的鲁棒性
如何提高系统的鲁棒性

在当今的技术环境中,系统面临着各种挑战,包括硬件故障、软件缺陷、网络攻击和人为错误。鲁棒性是指系统在面对这些挑战时保持正常运行的能力。
一、定义鲁棒性
鲁棒性是指系统在面对异常输入或意外情况时,仍能保持其核心功能的能力。一个鲁棒的系统能够抵御故障,从错误中恢复,并在不确定的环境中保持稳定。
二、系统设计阶段的鲁棒性考量
- 模块化设计 :通过将系统分解为独立的模块,可以隔离故障,减少系统其他部分的影响。
- 冗余设计 :在关键组件中引入冗余,确保在部分组件失败时系统仍能继续运行。
- 容错机制 :设计能够检测和处理错误的机制,如错误检测和纠正码(ECC)。
- 异常处理 :在软件中实现异常处理逻辑,以优雅地处理意外情况。
三、软件开发中的鲁棒性
- 代码审查 :通过代码审查来识别和修复潜在的错误和安全漏洞。
- 单元测试 :编写单元测试来验证每个模块的功能,确保它们在各种条件下都能正常工作。
- 集成测试 :确保各个模块在集成后能够协同工作,没有意外的交互问题。
- 压力测试和负载测试 :模拟高负载条件,以测试系统在极端情况下的表现。
四、硬件和网络层面的鲁棒性
- 硬件冗余 :使用多个电源、网络接口卡和其他关键硬件组件,以防止单点故障。
- 网络冗余 :通过多路径路由和负载均衡技术,确保网络连接的高可用性。
- 电源管理 :设计电源管理系统,以防止电压波动和电源中断对系统的影响。
五、系统监控和日志记录
- 实时监控 :实施实时监控系统,以便及时发现和响应系统异常。
- 日志记录 :记录系统操作的详细日志,以便于事后分析和故障排除。
六、灾难恢复和备份
- 数据备份 :定期备份关键数据,以防数据丢失或损坏。
- 灾难恢复计划 :制定灾难恢复计划,以确保在发生重大故障时能够迅速恢复服务。
七、用户界面和用户体验
- 错误处理 :设计用户友好的错误消息,指导用户如何解决问题。
- 用户反馈 :鼓励用户提供反馈,以便不断改进系统的鲁棒性。
八、持续集成和持续部署(CI/CD)
- 自动化测试 :在CI/CD流程中集成自动化测试,以确保新代码不会破坏现有功能。
- 持续监控 :在部署后持续监控系统性能,以便快速识别和修复问题。
九、安全措施
- 安全审计 :定期进行安全审计,以识别和修复安全漏洞。
- 入侵检测系统 :部署入侵检测系统,以监控和防御网络攻击。
十、人员培训和文化建设
- 培训 :对开发人员和运维人员进行鲁棒性相关的培训,提高他们对系统鲁棒性的认识。
- 文化 :建立一种重视鲁棒性和质量的企业文化,鼓励团队成员共同努力提高系统稳定性。
结论:
提高系统的鲁棒性是一个持续的过程,需要从设计、开发、部署到维护的每个阶段都进行考虑。通过实施上述策略和实践,可以显著提高系统在面对各种挑战时的稳定性和可靠性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电源
+关注
关注
185文章
19072浏览量
265262 -
硬件
+关注
关注
13文章
3682浏览量
69264 -
鲁棒性
+关注
关注
2文章
48浏览量
13210 -
电压波动
+关注
关注
0文章
60浏览量
8737
发布评论请先 登录
相关推荐
热点推荐
20%丢包率仍可解码,安谋科技新一代“玲珑”VPU IP高鲁棒性加持
,不稳会花屏。安谋科技发布的新一代VPU IP—— “玲珑”V560/V760,从架构设计之初就瞄准这个市场痛点,通过两项核心能力实现视频处理“快且稳”:一是独创条带级编解码控制技术,显著降低延时;二是全维度高鲁棒性设计,让视频

MAX8969:手持设备应用的高效升压转换器
转换器,看看它是如何满足手持设备的各种需求的。 文件下载: MAX8969.pdf 一、产品概述 MAX8969是一款专为单节锂离子电池应用设计的简单1A升压转换器,采用了小巧的封装。它具备多种保护功能,如输入欠压锁定、短路保护和过温关断等,能有效提高系统的
合科泰高可靠性MOSFET的核心应用场景
智能工厂的“零中断”运营,最终依赖于能量转换与分配系统的绝对可靠。作为电力控制的核心执行单元,功率MOSFET的可靠性直接决定了电机驱动、电源转换等关键环节的效能与鲁棒
瞻芯电子G2 650V SiC MOSFET的鲁棒性验证试验
瞻芯电子(IVCT)基于经典寿命模型,对大样本量的第二代(G2)650V SiC MOSFET 进行了鲁棒性验证试验(Robustness-Validation)。该试验严格遵循AEC-Q101
基于热-流固多场耦合的航空柱塞泵壳体回油干扰失稳机理及鲁棒性控制
随着飞机系统复杂性的增加,液压系统架构也在不断演进,其中多泵并联液压系统因能满足多余度、大功率和低自重的需求而成为大型飞机的首选方案。这种系统

一文探究SiC MOSFET的短路鲁棒性
SiC MOSFET具有导通电阻低、反向阻断特性好、热导率高、开关速度快等优势,在高功率、高频率应用领域中占有重要地位。然而,SiC MOSFET面临的一个关键挑战是降低特征导通电阻(RON,SP)与提升短路耐受时间(tSC)之间的权衡。

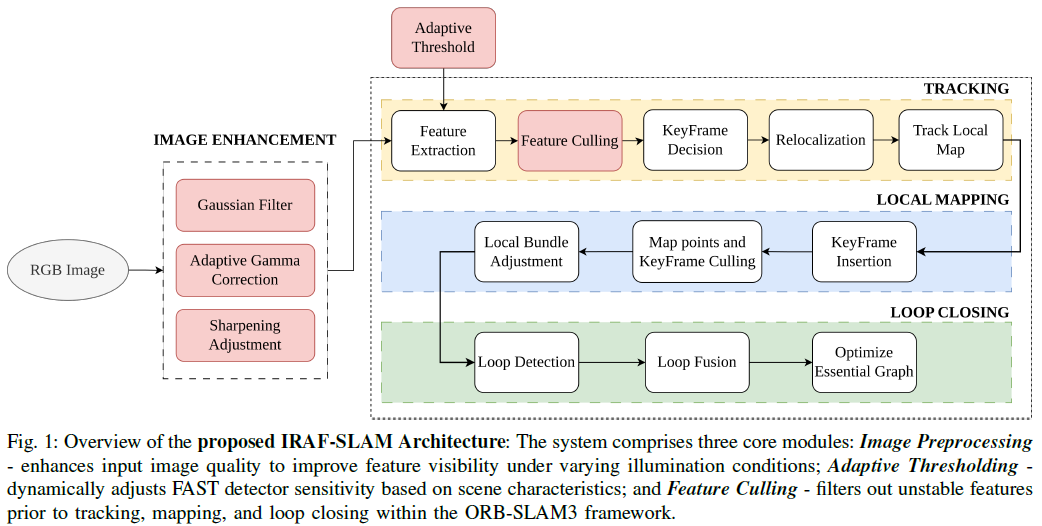
具备光照鲁棒和自适应特征剔除的VSLAM前端框架
现有的基于特征的VSLAM系统依赖于固定的前端参数,这使得它们在面对光照突变时显得十分脆弱,且特征跟踪也不稳定。为应对这些挑战,我们提出了“IRAF-SLAM”,这是一种具备光照鲁棒性
SiLM2004ECA-DG 200V 高鲁棒性半桥门极驱动器
兼容性(3.3V/5V)。内置的防交叉导通逻辑和欠压保护进一步提升了系统安全性。
#SiLM2004 #低压驱动芯片 #半桥驱动 #门极驱动
发表于 07-30 08:49
永磁同步电机高性能控制系统研究
。目前,基于PID的位置-速度-电流串级控制是 PMSM 控制系统普遍采用的典型控制架构。这种结构中,外环到内环带宽依次升高,系统稳定性和鲁棒性
发表于 07-17 14:31
高压MOS管MDD7N65F/MDD7N65P/MDD7N65D数据手册
超低栅极电荷 低反向传输电容 快速开关能力 雪崩能量测试 增强型dv/dt耐受能力,高鲁棒性
发表于 07-09 14:42
•1次下载
高压MOS管MDD2N65F/MDD2N65P/MDD2N65D数据手册
超低栅极电荷 低反向传输电容 快速开关能力 雪崩能量测试验证 增强型dv/dt耐受性,高鲁棒性
发表于 07-09 14:30
•1次下载
无刷直流电机抗饱和变结构PI控制研究
了控制系统仿真模型,仿真结果表明:相对于传统的 P 控制算法,抗饱和变结构控制算法能够使系统的积分饱和现象得到抑制,速度响应的超调量更少,到达稳态时间更短,同时还提高了系统对负载扰动的
发表于 06-27 16:51
无刷直流电机单神经元自适应智能控制系统
PID3个参数的自适应。采用分段线性化方法建立BLDCM反电动势梯形波,采用环电流控制器实现电流调节,并在Matab/Simulink仿真平台上搭建仿真模型,结果表明智能PID控制效果和鲁棒性皆优于
发表于 06-26 13:36
意法半导体推出两款高压GaN半桥栅极驱动器
意法半导体推出两款高压GaN半桥栅极驱动器,为开发者带来更高的设计灵活性和更多的功能,提高目标应用的能效和鲁棒性。



评论