 转运机器人支持Wi-Fi漫游和无轨化激光SLAM导航技术
转运机器人支持Wi-Fi漫游和无轨化激光SLAM导航技术

随着科技的不断进步,智能机器人已经成为推动产业升级的重要力量。在物流领域,富唯智能转运机器人凭借其卓越的性能和智能化的设计,正逐渐成为行业的新星。
富唯智能转运机器人内部搭载了ICD系列核心控制器,拥有强大的处理能力,可以应对各种复杂的转运任务。其负载能力高达1000kg,重复精度高达±5mm,确保了转运的准确性和稳定性。同时,支持Wi-Fi漫游和无轨化激光SLAM导航技术,使得机器人能够在复杂的环境中灵活穿梭,实现稳健的网络数据交互。
更令人惊喜的是,富唯智能转运机器人还配备了3D避障相机等多传感器进行安全防护,有效避免了在转运过程中可能出现的碰撞事故,大大提高了转运的安全性。
在应用场景上,富唯智能转运机器人表现出了极高的适应性。无论是汽车、新能源、电子等行业,还是物流、食品与饮料、生命科学等行业,都可以看到它的身影。它能够轻松应对不同场景下的料箱、物料等转运工作,实现无人化运输,为企业节省了大量的人力成本。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31439浏览量
223619 -
wi-fi
+关注
关注
15文章
2464浏览量
130019 -
SLAM
+关注
关注
24文章
459浏览量
33416
发布评论请先 登录
相关推荐
热点推荐
ROS2 SLAM建图与导航实战--基于米尔RK3576开发板
?
在ROS2生态中,SLAM(同时定位与建图)与导航(Navigation)是机器人自主移动的核心技术。SLAM Toolbox由Stev
发表于 03-12 17:55
技术资讯 I Wi-Fi 模块设计
本文要点Wi-Fi模块设计旨在打造一套紧凑且高效的硬件和软件解决方案,使设备能够通过Wi-Fi网络实现通信。Wi-Fi模块设计是一个复杂的过程,要求研发人员兼具硬件与软件工程方面的专业知识

Wi-Fi:无线连接的全球通用语
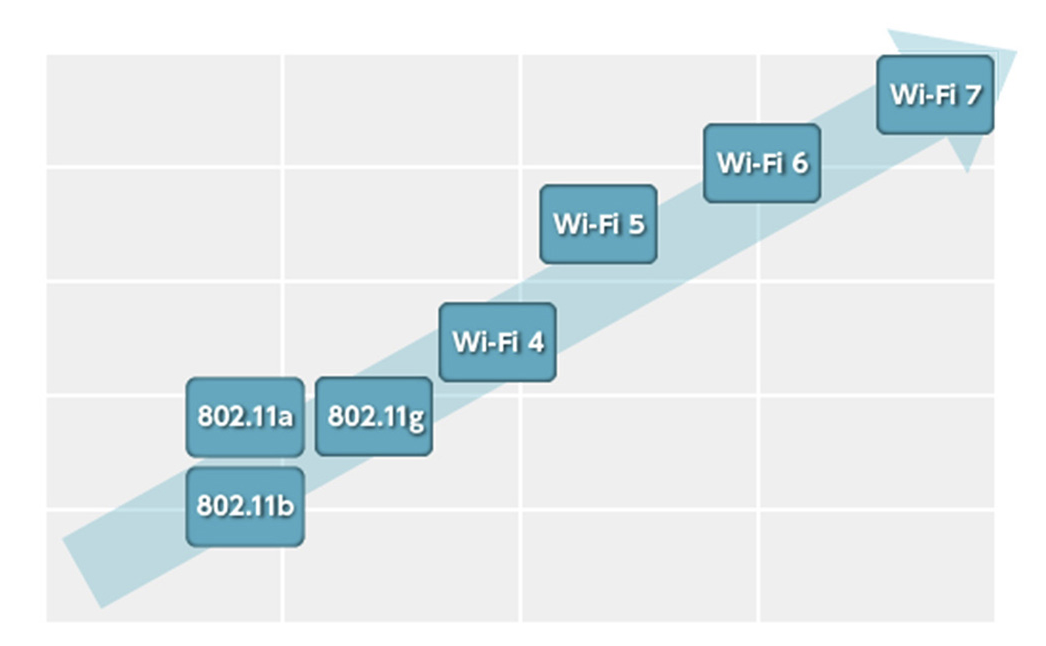
Wi-Fi功能,跨品牌、跨设备互联互通性强,生态完整。3. 灵活部署,易于扩展支持星型、Mesh等多种组网方式,可根据环境灵活布置接入点,扩大覆盖范围。4. 技术持续演进从802.11a/b/g到
发表于 01-07 09:49
Nordic发布nRF7002 EBII 开发板, 支持Wi-Fi 6, 解锁nRF54L新玩法
Wi-Fi 6 的开发进程。开发人员可依托Nordic在低功耗无线技术领域的专业优势,构建先进的互联多协议应用。
针对兼容性进行优化
nRF7002 EBII 支持双频 Wi-Fi
发表于 12-10 11:58
Wi-Fi几乎渗透到所有需要无线连接的场景中,是构建本地无线网络的首选技术。
,部分支持6GHz,不同频段在覆盖、穿透与速率上各有特点。
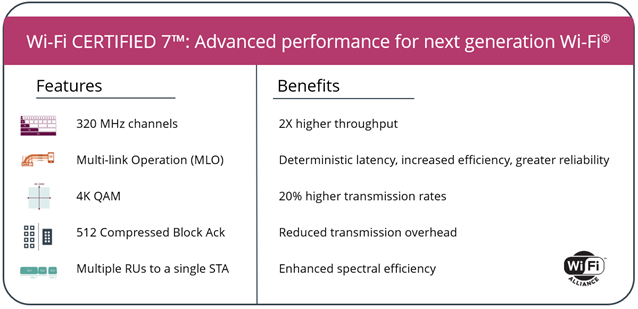
MIMO与OFDMA: Wi-Fi 6/7中的关键技术,提升多设备并发效率与网络容量。
四、典型应用场景
家庭与办公网络| 公共场所无线覆盖
发表于 12-08 17:23
浅谈Wi-Fi 6E与Wi-Fi 7的关键器件——BAW滤波器新技术
,美国联邦通信委员会(FCC)投票通过将6GHz频谱划为免许可频段供Wi-Fi使用,这标志着Wi-Fi正式进入“三频”时代——除Wi-Fi 6及前代技术使用的2.4GHz和5GHz频段
发表于 09-19 18:29
•2460次阅读
解读Nordic基于SSID的Wi-Fi定位解决方案
,与 nRF91 系列蜂窝物联网模组配合使用,可实现基于 SSID 的 Wi-Fi 定位。Nordic基于SSID的Wi-Fi定位可以在室内和室外、城市和郊区以极其省电的方式获取精确的位置信息。这是对全球导航卫星系统(GNSS)

基于 SSID 的 Wi-Fi 定位:与其他定位服务的性能比较
是一种著名的无线网络技术,用于设备的局域网和互联网接入。Wi-Fi 通过 Wi-Fi 网络为家庭、办公室和学校等环境提供便捷的无线互联网接入服务。
Wi-Fi 定位是一种地理定位功能
发表于 08-31 21:01
Wi-Fi 8:开启极高可靠性 (UHR) 连接的新纪元——1
2023年11月成立,将持续致力于推动802.11bn的标准化进程,直至符合Wi-Fi 8标准且通过完整认证的产品问世。
表1. Wi-Fi 技术的演进
图2. IEEE 802.
发表于 06-13 11:09
迅通PTR7002 Wi-Fi 6模块技术解析
在物联网设备对无线连接性能要求日益严苛的背景下,迅通推出的PTR7002 Wi-Fi 6模块凭借其技术特性成为开发者关注的硬件方案。本文将从芯片架构、射频性能及开发支持等维度进行深度剖析
发表于 06-10 10:38
详细介绍机场智能指路机器人的工作原理
带)定位、Wi - Fi 定位等。蓝牙定位可以通过与机场内部署的蓝牙信标进行通信,获取机器人的大致位置信息。UWB 定位则利用超宽带信号实现更精确的定位,能够在复杂的室内环境中达到较高的定位精度,误差
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
这一部分内容,我掌握了如何在ROS 2中实现SLAM,这对于提高机器人的自主导航能力具有重要意义。
其他内容概述
除了二维码识别和SLAM技术
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
、Gazebo仿真(含RGBD相机/激光雷达仿真)、实物机器人运动控制,实现\"仿真→实物\"的无缝衔接
高阶应用篇(7-9章)
聚焦视觉SLAM、自主导航等前沿场景,提供完整项目链路
发表于 04-27 11:24



评论