 伺服电机测速方法解析
伺服电机测速方法解析

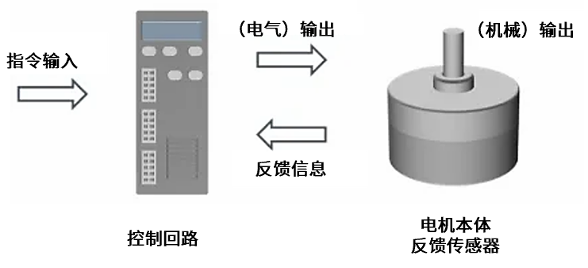
一般常见的伺服电机测速传感器分为数字,模拟两类。数字的有光电编码器,磁编码器;模拟的有测速电机;还有一种就是旋转变压器,它本质上是属于模拟类的,但是通常是将它的信号处理成为数字类的,因此也把它归结为数字类测速传感器。本文所说的测速方法都是特指对数字脉冲信号的处理而获得速度信息的方法。
一般测速方法有3类:M法,T法,M/T法。
1.M法简介:
(1)M法:开一个时间窗口,在这个时间窗口内数编码器脉冲个数, 速度越快,当然对于时间窗口数到的脉冲数就越多。
(2)角速度计算:角速度是指在时间窗口内的平均角速度。角速度= K×脉冲数 K为定常系数。
(3)精度:在时间窗口数到的脉冲数如果是N,其最大的绝对误差为1个脉冲,则理论的相对误差= 1/N。有个小窍门可以减小这个误差,就是如果数到的脉冲数为N,则把它改为N+0.5。这时的最大误差=1/2N。
(4)特点:
a.时间窗口越大,精度越高,但由测量造成的纯延时越大。
b.在时间窗口不变的情况下,转速越慢,误差越大。
2.T法简介:
(1)T法:以编码器脉冲作为时间窗口,在这个时间窗口内,数定时器时钟源的脉冲数,也就是通常说的捕捉方式。当速度越快,编码器的时间窗口越短,脉冲个数也越少。
(2)角速度:角速度是指时间窗口内的平均角速度。
角速度= K/N, 其中K为定常系数。
(3)精度:其最大的误差也是一个脉冲。相对误差=1/(N+1)。
(4)特点:转速越低,精度越高,但由测量造成的纯延时越大。
3.M/T法简介:
(1)M/T法:该法与T法类似,所不同的是T法以一个编码器脉冲为时间窗口,而M/T法以m个编码器脉冲为时间窗口,数定时器时钟源的脉冲个数。
(2)角速度:角速度是指在时间窗口内的平均角速度。角速度=Km/N, 其中K为定常系数,m为组成时间窗口的编码器脉冲个数,N为时间窗口数到的定时器时钟源脉冲个数。
(3)特点:和T法相比,M/T法在高速时可改善测量精度,但相应的增加了纯延时。
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55505浏览量
793964 -
伺服电机
+关注
关注
88文章
2200浏览量
61573 -
测速
+关注
关注
0文章
41浏览量
14604
发布评论请先 登录
行星齿轮减速机如何匹配伺服电机转速?

网线测速怎么测
PLC怎么控制多台交流伺服电机达到同步工作

三菱FX3U PLC控制伺服电机的高速脉冲模式解析

伺服电机增益详解
伺服电机的控制方式简述

派克Parker防爆伺服电机与普通伺服电机的区别

步进伺服电机的六大问题处理技巧

舵机与伺服电机的区别是什么?
伺服电机中的回原点方式

机床伺服电机的选型方法分析
伺服电机编码器与转子磁极相位对齐方法
如何判断伺服电机是否损坏




评论