 AirPods 监控头部运动,同步大象机器人myCobot 280协作机械臂
AirPods 监控头部运动,同步大象机器人myCobot 280协作机械臂

本篇文章是经过作者kimizuka授权,进行编辑转载。
原文链接:AirPods → iPhoneアプリ → Express → python-shell → pymycobot → myCobotと繋いでいって、AirPodsの回転角とmyCobotの姿勢と同期する
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
python
+关注
关注
58文章
4884浏览量
90299 -
机械臂
+关注
关注
14文章
601浏览量
26184 -
大象机器人
+关注
关注
0文章
87浏览量
405
发布评论请先 登录
相关推荐
热点推荐
使用myCobot 280 Jeston Nano进行物体精确识别追踪
,以便在实际应用中发挥作用,这个项目涉及到许多技术和算法,包括视觉识别、手眼协同和机械臂控制等方面。 机械臂的介绍 mycobot280-J
结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(下)
。 本文主要深入项目内核的主要部分,同样也主要分为三个部分:机械臂的视觉抓取,LIMO Pro在ROS中的功能,建图导航避障等,以及两个系统的集成。 设备准备 myCobot 280

如何控制真实机械臂/机器人呢
数据传输的通道,如何将ROS功能包计算得到的数据发给真实机器人并使之运动是问题的关键。机械臂有点复杂,我们先以简单一些的ROS小车为例,看看ROS是如何让真实小车动起来的。大家在某宝上
发表于 09-07 09:12
Mycobot机械臂各关节的运动(三)
这一节我们开始第一个程序,就是机械臂各关节的运动。让我们首先打开Mycobot,然后登入一个终端,我们输入“python”进入python环境。 我们采用一边实验一边介绍
使用 Python 和可视化编程控制树莓派机械臂myCobot
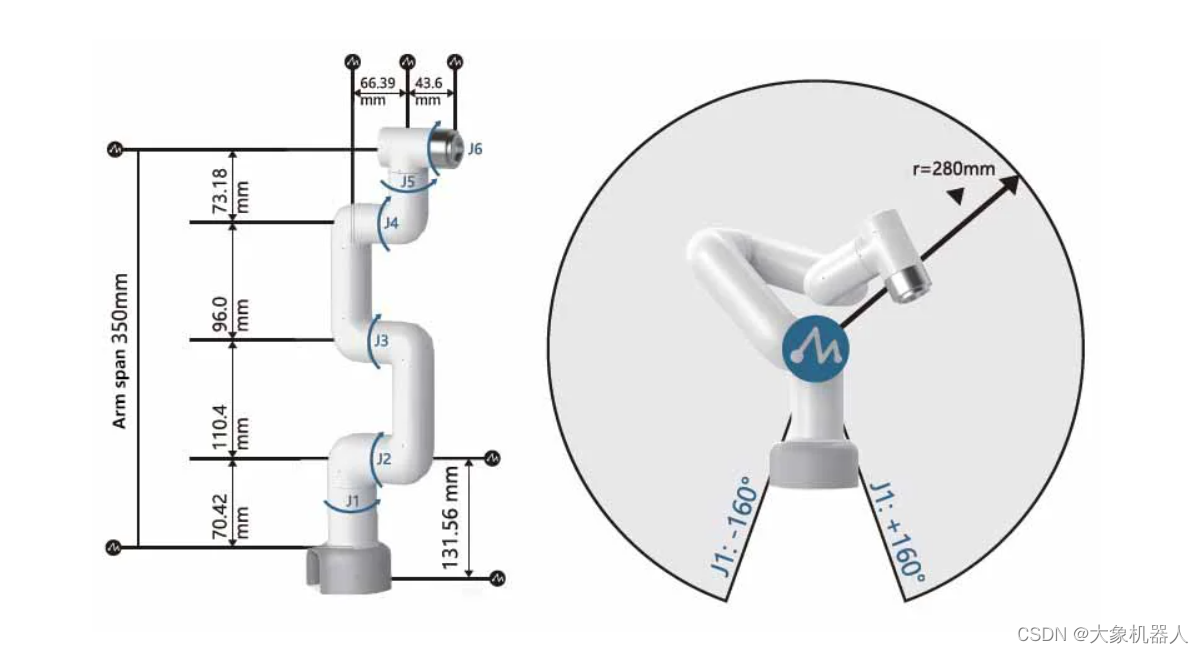
myCobot 280 Pi 是一款 6 自由度多功能桌面机械臂。它由大象机器人研发,使用 Ra



大象机器人六轴协作机械臂myCobot 320 进行手势识别!
引言 我是一名专注于机器学习和机器人技术自由者。我的热情始于大学期间的人工智能课程,这促使我探索人机交互的新方法。尤其对于机械臂的操作,我一直想要简化其复杂性,使之更加直观和易于使用。

结合大象机器人六轴协作机械臂myCobot 280 ,解决特定的自动化任务和挑战!(上)
PPRO SLAM雷达小车,它具备自主导航、地图构建和路径规划的能力;另一部分是Mycobot 280 M5机械臂,这是一个具有六自由度、工作半径
大象机器人myCobot 320六轴协作机械臂用户开箱!
本篇文章是经过作者はるなし的授权,进行转载编辑,感谢はるなし给我们贡献了一篇很好的开箱文章。 引言 HI,我是はるなし。我是一名医学生,喜欢制作机器人和人工智能。这次我购买了myCobot pro

大象机器人开源协作机械臂myCobot 630 全面升级!
1. 开篇概述 在快速发展的机器人技术领域中,Elephant Robotics的myCobot 600已经证明了其在教育、科研和轻工业领域的显著适用性。作为一款具备六自由度的机械臂,
大象机器人开源协作机械臂机械臂接入GPT4o大模型!
和智能化的任务,提升了人机协作的效率和效果。我们个人平时接触不太到机械臂这类的机器人产品,但是有一种小型的机械

大象机器人推出myCobot 280 RDK X5,携手地瓜机器人共建智能教育机
摘要大象机器人全新推出轻量级高性能教育机械臂myCobot280RDKX5,该产品集成地瓜机器人

大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形




评论