 富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术

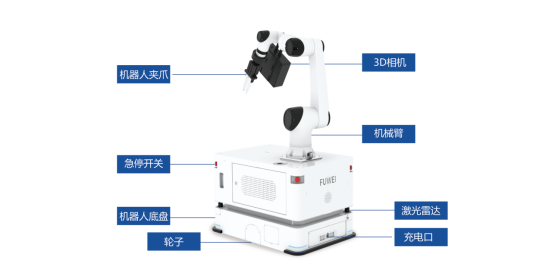
富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对接。此外,富唯智能机器人还集成了协作机器人、移动机器人和视觉引导技术,具有物料高精度抓取或放置功能,可满足各种复杂场景的协作搬运需求。
富唯智能移动机器人的核心技术
1、计算机视觉技术
计算机视觉是富唯智能机器人的重要核心技术之一。通过先进的计算机视觉技术,机器人能够识别和理解环境中的物体和场景,从而实现自主导航、目标追踪等功能。富唯智能机器人利用深度学习算法对图像进行识别和处理,提高了机器人在复杂环境中的适应能力和精度。
2、传感器融合技术
传感器融合技术是富唯智能机器人的另一项核心技术。机器人通过集成多种传感器,如激光雷达,收集各种环境信息。然后,通过先进的算法将不同传感器的数据进行融合,以获得更准确的环境模型和机器人状态信息。这种技术提高了机器人在复杂环境中的导航和定位精度,增强了机器人的稳定性和可靠性。
3、自主导航技术
自主导航技术是移动机器人的核心功能之一。富唯智能机器人采用了先进的SLAM导航技术,导航精度为±5mm,实现了机器人在未知环境中的自主导航。通过传感器采集数据并构建地图,机器人能够实时确定自身的位置和姿态,并规划出最优的路径,实现自主移动。
4、人工智能技术
人工智能技术是富唯智能机器人的重要支撑。通过深度学习和强化学习等技术,机器人能够不断地学习和改进自身的行为和决策,提高自身的智能水平。这种技术使得机器人能够更好地适应不同的任务和环境,为机器人的应用提供了更广阔的领域和前景。
富唯智能移动机器人以核心技术为引擎,驱动着创新的飞速发展。无论是先进的导航技术、传感器融合技术,还是人工智能和机器学习技术,都让富唯智能机器人在行业中独领风骚。这些技术不仅提升了机器人的能力,更为未来的应用开拓了无限可能。
审核编辑 黄宇
-
机器人
+关注
关注
214文章
31691浏览量
224632 -
计算机视觉
+关注
关注
9文章
1716浏览量
47779
发布评论请先 登录

智能融合,即刻启航:富唯智能复合机器人引领柔性制造新时代
Infineon移动机器人电机控制方案深度解析
复合机器人开启血浆包“零接触”搬运新时代

移动的智慧:复合机器人开启24小时不间断上下料新纪元

移动机器人技术的发展历程
当复合机器人碰到障碍物,会触发怎样的智能绕障机制?
复合机器人3C行业集成方案:智能制造的创新引擎
恩智浦自主移动机器人设计要点

复合机器人通讯协议:富唯智能的技术突破与行业引领




评论