 RA6T2无传感器矢量控制应用笔记 [完结篇] 评估环境说明 (2)
RA6T2无传感器矢量控制应用笔记 [完结篇] 评估环境说明 (2)

4. 评估环境说明
4.5.3 分析器功能的变量列表
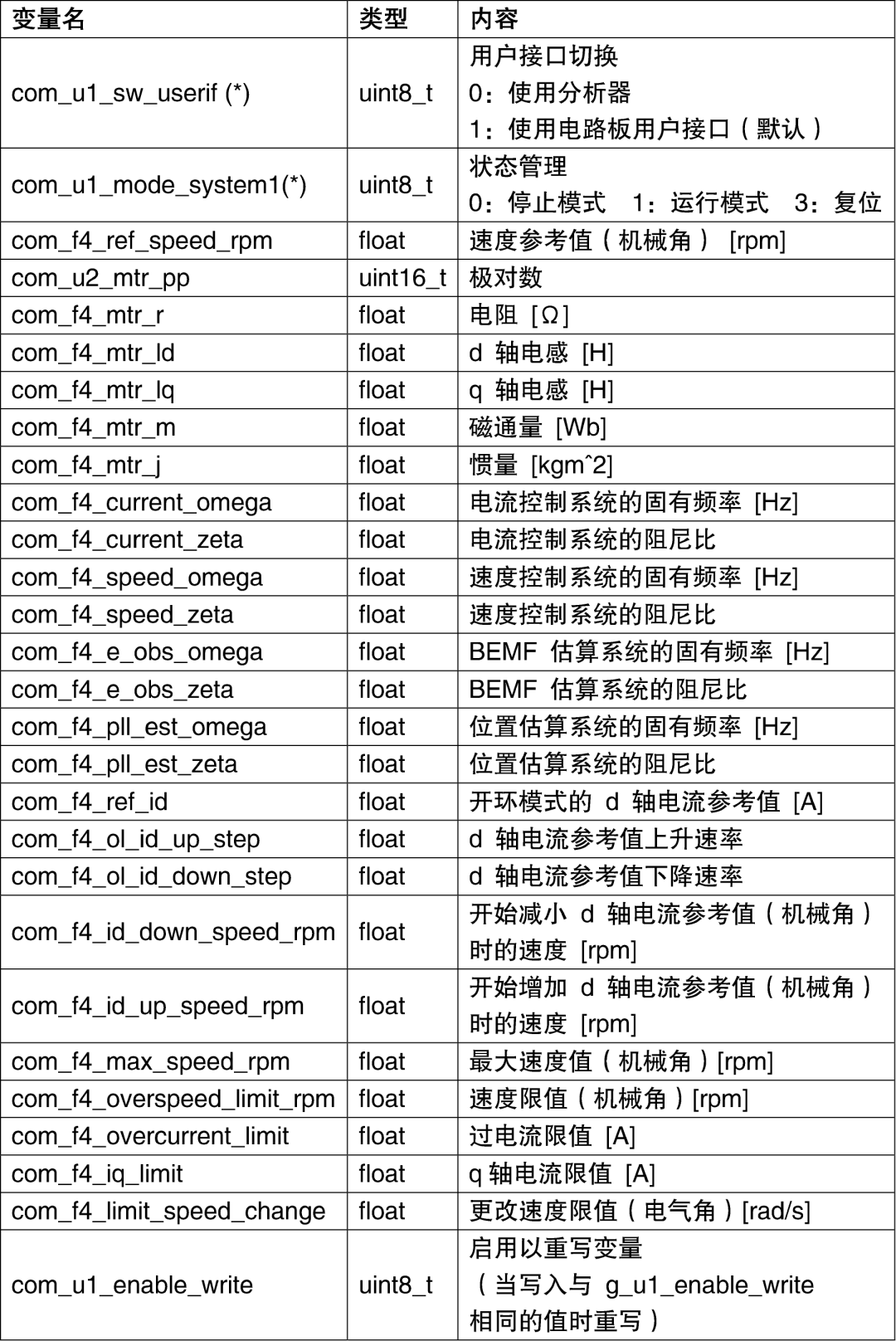
表4-3列出了分析器的变量。当与 g_u1_enable_write 相同的值写入 com_u1_enable_write 时,这些变量会反映到相应的变量中。但是,带 (*) 的变量并不依赖于 com_u1_enable_write。
表4-3 分析器变量列表
4.5.4 分析器操作示例
下例说明使用分析器的电机驱动操作。操作使用图4-4所示的“Control Window”(控制窗口)。关于“Control Window”(控制窗口)的规范,请参见“Renesas Motor Workbench 用户指南”。
将用户界面切换到分析器
1、对于“com_u1_sw_userif”标记,选中 [W?] 列的复选框。
2、在“com_u1_sw_userif”的 [Write] 框中输入“0”。
3、单击“Write”(写)按钮。
驱动电机
1、[W?] 列的复选框中包含
“com_u1_mode_system”
“com_f4_ref_speed_rpm”
“com_u1_enable_write”
对应的复选标记。
2、在“com_f4_ref_speed_rpm”的 [Write] 框中输入一个参考速度值。
3、单击“Write”(写)按钮。
4、单击“Read”(读)按钮。
选中“com_f4_ref_speed_rpm”和“g_u1_enable_write”对应的 [Read] 复选框。
5、在“com_u1_enable_write”的 [Write] 框中输入“g_u1_enable_write”的值。
6、在“com_u1_mode_system”的 [Write] 框中输入“1”。
7、单击“Write”(写)按钮。
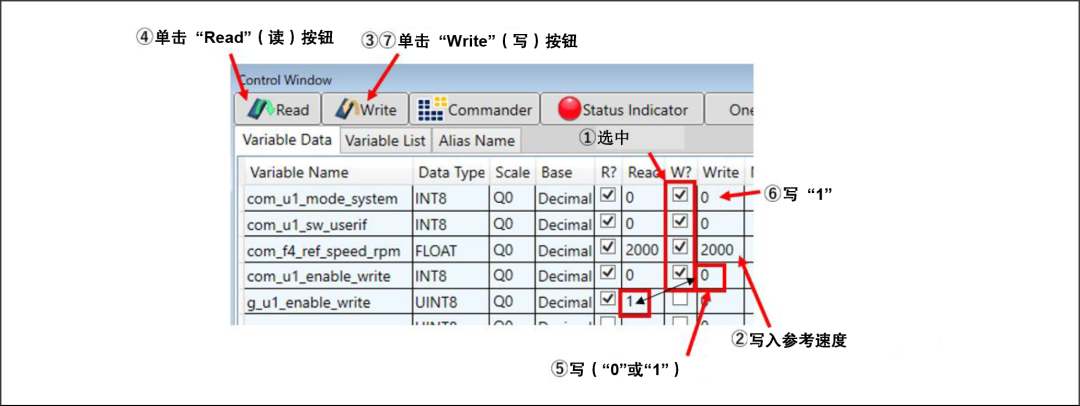
图4-9 操作步骤 - 驱动电机
停止电机
1、在“com_u1_mode_system”的 [Write] 框中输入“0”。
2、单击“Write”(写)按钮。
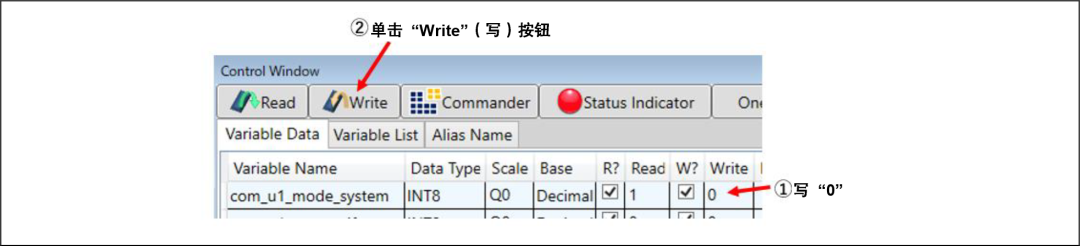
图4-10 操作步骤 - 停止电机
出错取消操作
1、在“com_u1_mode_system”的 [Write] 框中输入“3”。
2、单击“Write”(写)按钮。
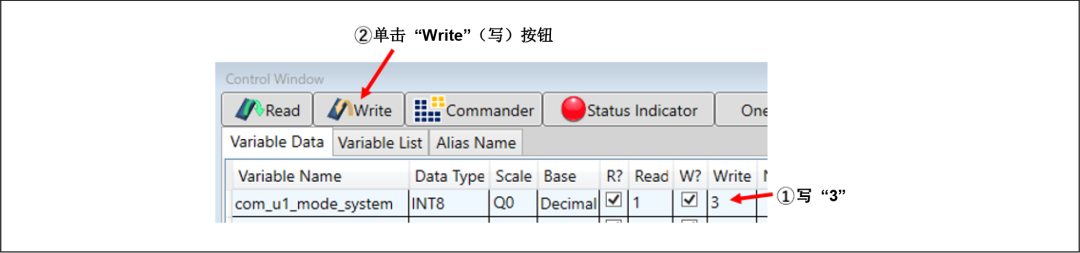
图4-11 操作步骤 - 出错取消操作
4.5.5 更改通信速度的示例
通过示例软件更改Renesas Motor Workbench通信速度的操作步骤如下所述。有关要更改的值,请参见Renesas Motor Workbench用户手册。
更改示例软件的通信速度设置(如果所需通信速率为10 Mbps)
1、按下主窗口上的“Clock”(时钟)按钮以将值改为80,000,000
该值的计算方法为将8,000,000乘以10
这是因为,UART通信波特率从1 Mbps改成了10 Mbps。
2、在“COM of Connection”(连接的COM)中选择所连套件的COM
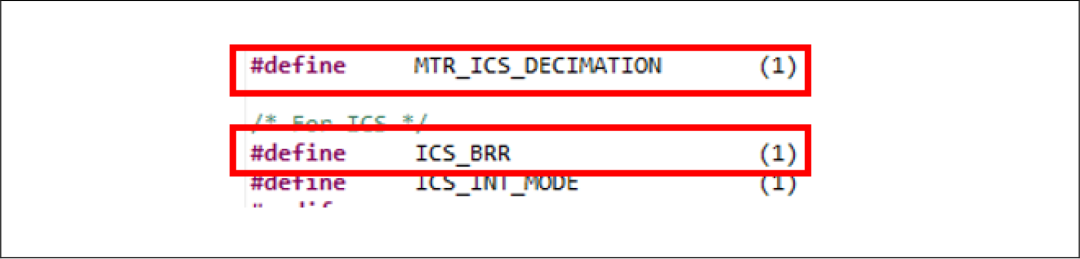
图4-12 修改 r_mtr_ics.h
更改Renesas Motor Workbench的通信速度设置以实现连接
1、按下主窗口上的“Clock”(时钟)按钮将值改为 80,000,000
2、将r_mtr_ics.h中MTR_ICS_DECIMATION的值改为1。
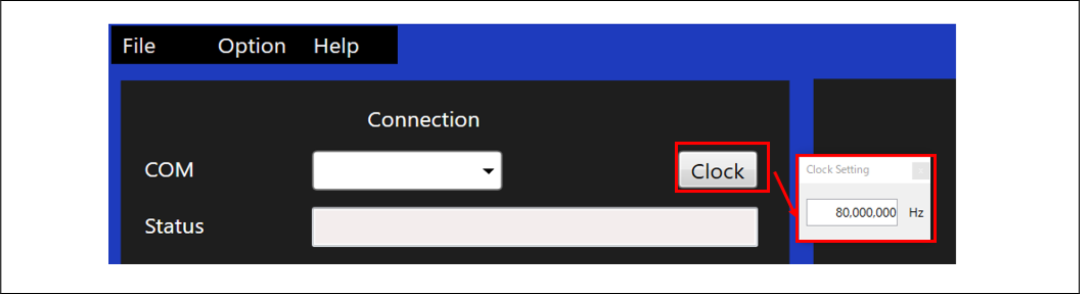
图4-13 时钟频率设置
如果连接失败,则在复位通信电路板后,重复执行重新连接步骤。
4.5.6 如何使用内置通信库
通过示例软件使用内置通信库而不是通信电路板来连接Renesas Motor Workbench的操作步骤如下所述。
PC与CPU板之间的连接
通过USB/串行转换板等连接CPU板和PC。
准备一个用于内置通信(例如921600bps)的项目
1、取消注册ICS2_RA6T2.o
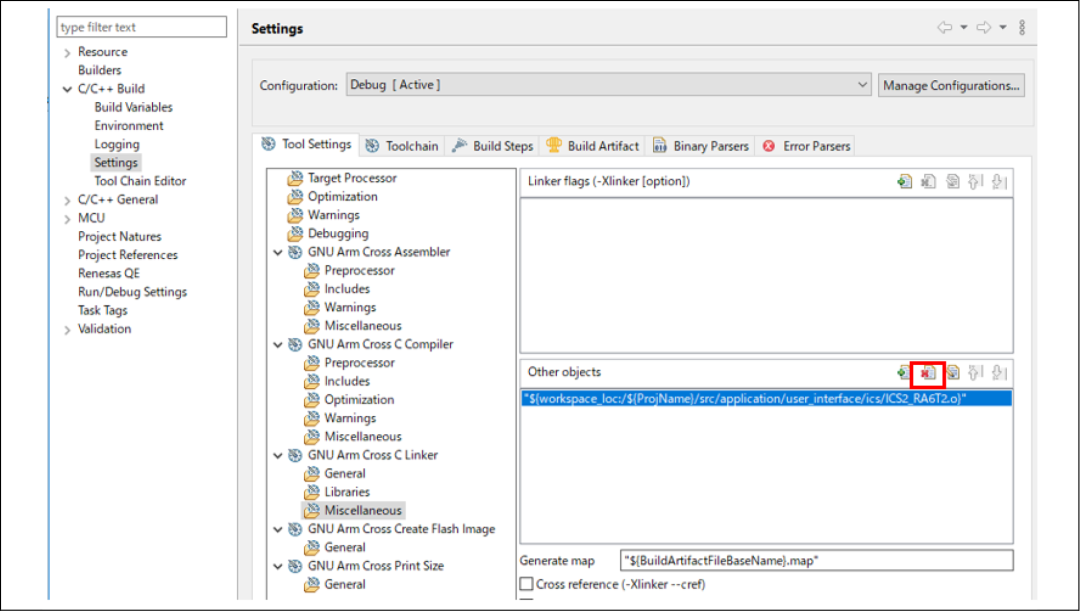
图4-14 取消注册ICS2_RA6T2.o
2、注册ICS2_RA6T2_Built_in.o
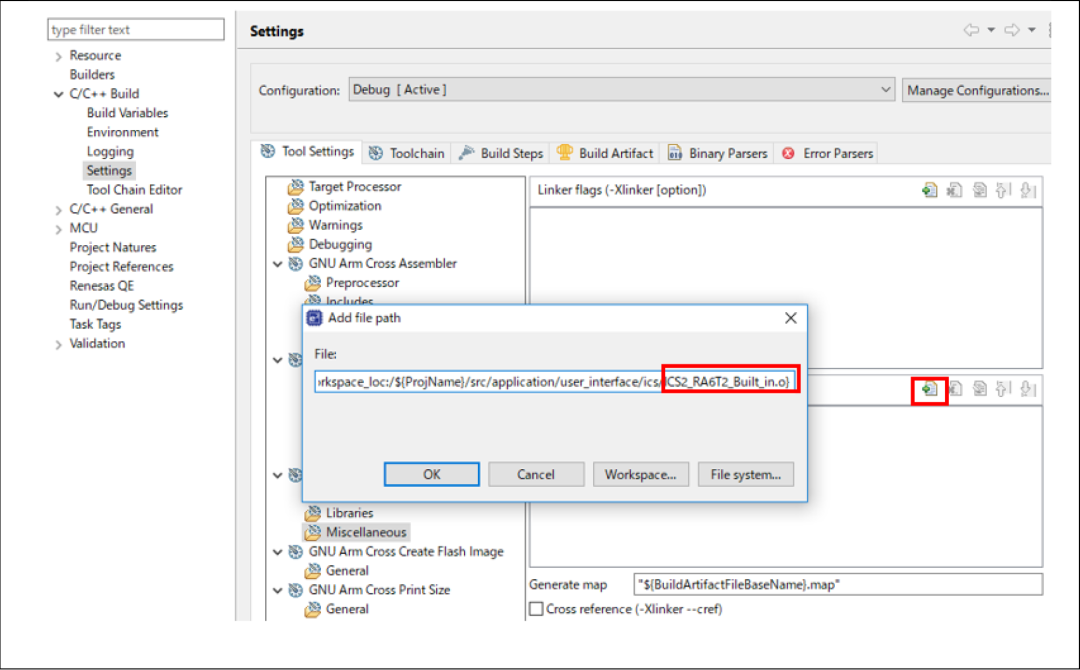
图4-15 注册ICS2_RA6T2.o
3、将r_mtr_ics.h中USE_BUILT_IN的值改为1。
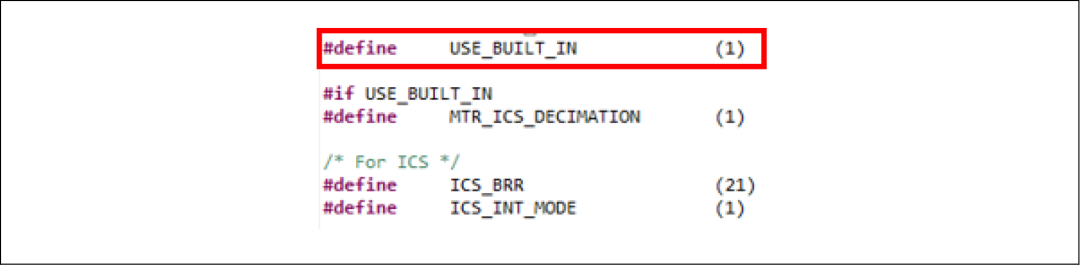
图4-16 修改r_mtr_ics.h
更改Renesas Motor Workbench的通信波特率设置以实现连接
1、使用主窗口中“Option”(选项)菜单下的“Baud rate”(波特率)对话框将值改为921,600。
2、在“COM of Connection”(连接的COM)中选择所连套件的COM端口。
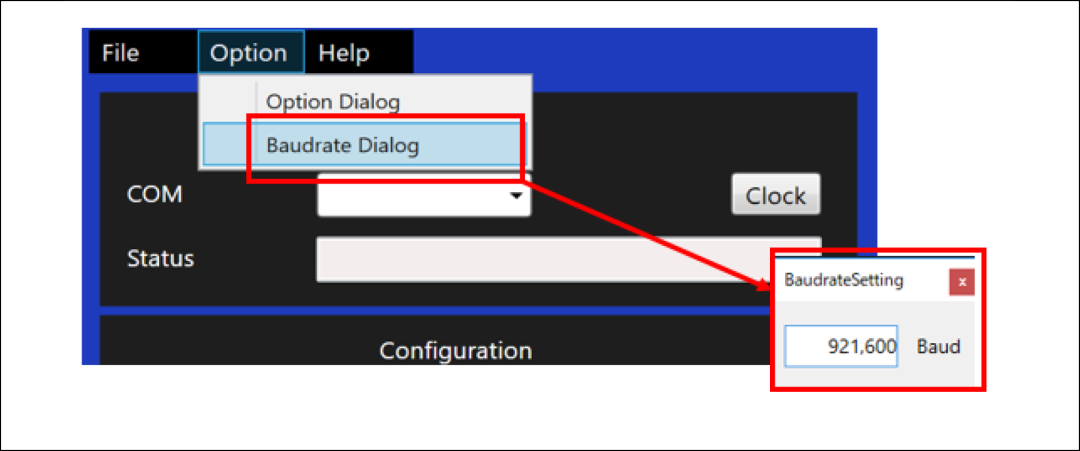
图4-17 波特率设置
-
传感器
+关注
关注
2578文章
55723浏览量
794812 -
mcu
+关注
关注
147文章
19211浏览量
405047 -
控制应用
+关注
关注
0文章
9浏览量
6672
发布评论请先 登录
![<b class='flag-5'>RA6T2</b><b class='flag-5'>无</b><b class='flag-5'>传感器</b><b class='flag-5'>矢量控制</b>应<b class='flag-5'>用笔记</b> [1] 概述](https://file1.elecfans.com/web2/M00/88/C6/wKgZomRx0tuADg6mAAAB2wBJKv0710.png)
RA6T2无传感器矢量控制应用笔记 [5] 控制程序描述 (3)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>无</b><b class='flag-5'>传感器</b><b class='flag-5'>矢量控制</b>应<b class='flag-5'>用笔记</b> [5] <b class='flag-5'>控制</b>程序描述 (3)](https://file1.elecfans.com/web2/M00/88/C5/wKgaomRx0NuAJIP8AAADbu4X9Ec851.gif)
RA6T2无传感器矢量控制应用笔记 [6] 评估环境说明 (1)
![<b class='flag-5'>RA6T2</b><b class='flag-5'>无</b><b class='flag-5'>传感器</b><b class='flag-5'>矢量控制</b>应<b class='flag-5'>用笔记</b> [<b class='flag-5'>6</b>] <b class='flag-5'>评估</b><b class='flag-5'>环境</b><b class='flag-5'>说明</b> (1)](https://file1.elecfans.com/web2/M00/89/73/wKgZomSD8FOAf1VwAAAB5Pk5lWI124.png)
RA6T2无传感器矢量控制应用笔记 [完结篇] 评估环境说明 (2) &参考文档
![<b class='flag-5'>RA6T2</b><b class='flag-5'>无</b><b class='flag-5'>传感器</b><b class='flag-5'>矢量控制</b>应<b class='flag-5'>用笔记</b> [<b class='flag-5'>完结篇</b>] <b class='flag-5'>评估</b><b class='flag-5'>环境</b><b class='flag-5'>说明</b> (<b class='flag-5'>2</b>) &参考文档](https://file1.elecfans.com/web2/M00/89/73/wKgZomSD8G-AfnoYAAABPc7_ZjQ575.png)
RA6T2的16位模数转换器操作 [5] 配置RA6T2 ADC模块 (2)
![<b class='flag-5'>RA6T2</b>的16位模数转换<b class='flag-5'>器</b>操作 [5] 配置<b class='flag-5'>RA6T2</b> ADC模块 (<b class='flag-5'>2</b>)](https://file1.elecfans.com/web2/M00/BB/1B/wKgZomWXtb6ACk_NAAARMuEl9ZA261.png)
RA6T2的16位模数转换器操作 [6] 配置RA6T2 ADC模块 (3)
RA6T2的16位模数转换器操作 [8] 配置RA6T2 ADC模块 (5)
RA6T2的16位模数转换器操作 [9] 配置RA6T2 ADC模块 (6)



评论