 A6伺服操作小妙招
A6伺服操作小妙招

本次速成班为大家带来了3个松下A6何服异常排除小妙招,只需10分钟,您即可成为精通操作的“大神”。
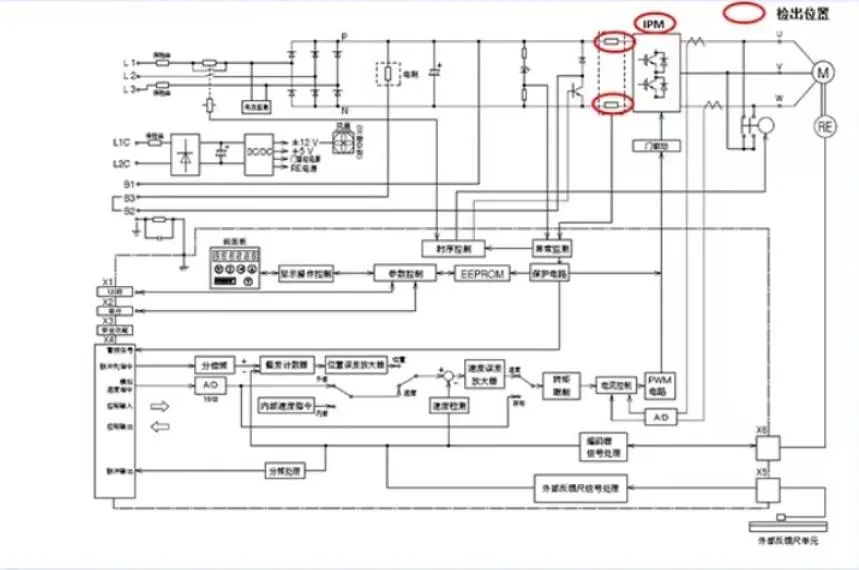
驱动器在使用过程中出现Err14.1IPM异常保护,应该怎么办呢?
这个问题提的很好,出现ERR14.1IPM异常保护,通常是因为驱动电机的IPM(智能功率模块)内的过电流检出异常。这时,我们应该这样处理:
1、确认电机的UVW是否正确连接。2、是否发生最大转矩→通过前面板的 "d04_trq" 进行确认→若是最大转矩(通常300%),降低加减速或者负载使其不出现最大转矩。
3、小输出时,测量相的线间电阻,确认是否不平衡。→若不平衡,需更换电机。(大功率由于卷线电阻在1Q以下,难以判断)4、确认电机的接地,测U、V、W与地线之间的电阻。→若无限大,需更换电机。找元器件现货上唯样商城
5、若通过以上方法并未得到改善,不能确认原因是什么,拆下电机的电源线,开启伺服,稍微转动电机轴。→若发生了Err14.1,很有可能是驱动器损坏。→若不发生Err14.1,很有可能是电机线的接地、电机线的接触不良、电机自身故障。
出现Err24.0位置偏差过大保护时,又该怎样处理呢?
这种情况是位置偏差脉冲超过Pr0.14(位置偏差过大设定)的设定时发生异常引起的。只需按照下面步骤操作,就可以解决啦!
1、电机未能跟随指令进行动作。指令位置偏差可通过驱动器前面板的 "d00_uEP" 的监视模式或者PANATERM监视功能的[指令位置偏差] 、波形曲线进行确认。确认转矩是否饱和,转矩指令值可通过驱动器前面板"d04_trq" 的监视模式或者PANATERM监视功能的 [转矩指令]、波形曲线进行确认。偏差大,转矩指令值不饱和时,需调整增益。使用转矩限制,若指令转矩被限制,试着将Pr0.13(第1转矩限制)、Pr5.22(第1转矩限制)的设定值变更到转矩指令值所容许的范围内。若转矩饱和的情况下,加长加减速时间,减轻负载,降低速度后进行确认。
2、Pr0.14(位置偏差过大设定)的值小。若设备的规格无问题, 则将Pr0.14(位置偏差过大设定)的设定值加大。
如果出现Err38.0驱动禁止输入保护,是不是也有办法解决呢?
那当然啦,出现这种异常的原因是Pr5.04 [驱动禁止输入设定]=0时,正方向/负方向驱动禁止输入(POT/NOT)都为ON。Pr5.04=2时,正方向/负方向驱动器禁止输入其中一个为ON。解决方案其实非常简单:
确认连接到正方向/负方向驱动禁止输入的开关、电线、电源、连接部是否异常。特别确认控制用信号电源(DC12~24V)启动是否延迟。
审核编辑 黄宇
-
驱动器
+关注
关注
54文章
9132浏览量
156994 -
电机
+关注
关注
145文章
9760浏览量
155067 -
伺服
+关注
关注
17文章
711浏览量
43639
发布评论请先 登录
双屏背后的控制逻辑:海纳A6/H6温控器的硬件解构与算法推演
双数码管背后的信号链路:海纳A6/H6通用型温控器的硬件解构
伺服定位模块的用法
关于松下A4系列伺服电机抖动的参数调整问题

松下A5伺服运行抖动怎么调整参数啊?
安川伺服驱动器警报代码说明

松下A6伺服通信协议介绍

派克Parker防爆伺服电机与普通伺服电机的区别

柯马助力福田戴姆勒升级A6重卡制造,实现高效智能焊装

人气“破圈”!中海达携A6农机导航亮相2025中国国际农机展

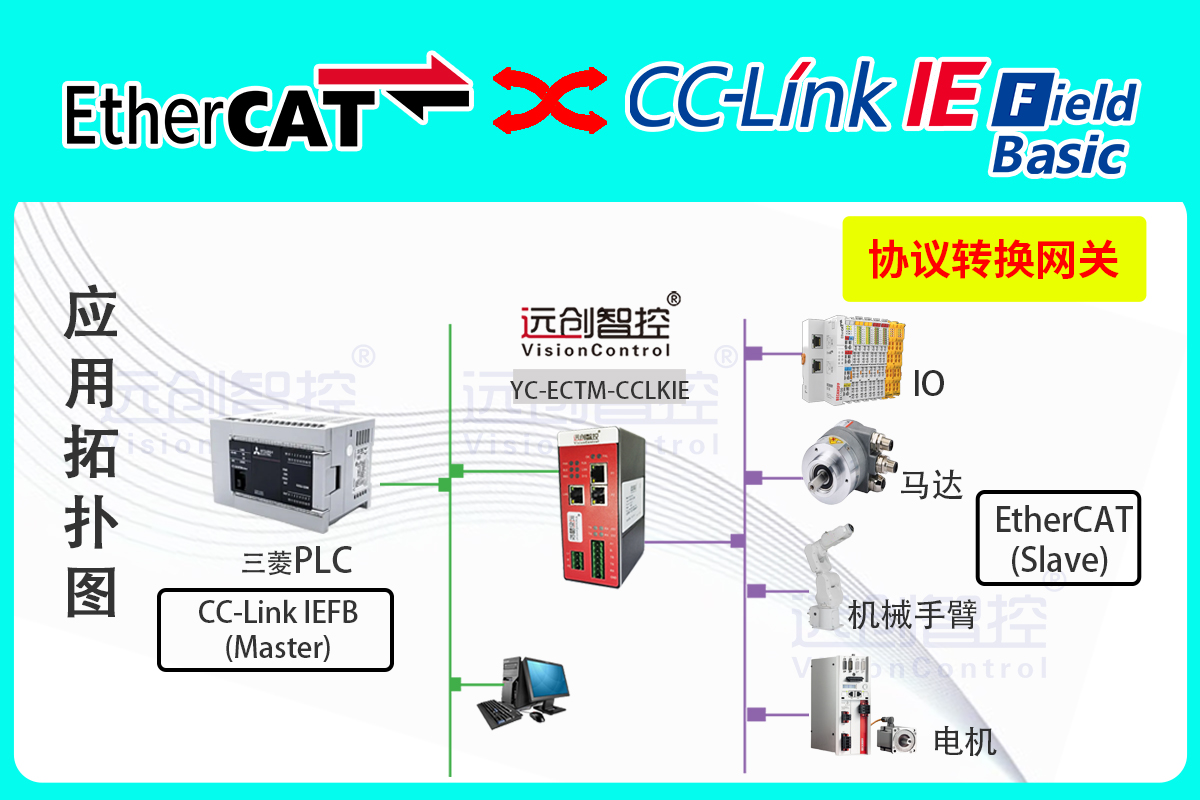
医药冻干产线中三菱PLC借助EtherCAT转CCLKIE网关实现EtherCAT伺服高效通信
常用伺服参数的调整

魏德米勒助力松下伺服驱动器革新突破
EtherCAT主站转Profinet网关连接汇川伺服系统的操作模式控制技术方案

基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案




评论