 伺服定位模块的用法
伺服定位模块的用法

使用伺服定位模块,简单来说就是一套“规划-接线-配置-编程-调试”的标准化流程。下面将以主流的三菱和西门子系列为例,为你拆解各个环节的具体操作。
通用操作流程
1. 硬件规划与接线
核心任务:根据电机类型和精度要求,选择支持脉冲控制(如三菱FX5U内置定位)或总线控制(如三菱QD77、西门子S200 PN)的PLC与模块。
关键接线:连接好控制线缆和外部I/O信号,例如原点、限位开关等。
2. 参数配置
PLC与模块参数:
选择脉冲输出模式:通常是脉冲+方向 (Pulse/Sign)或正/反脉冲 (CW/CCW)。
设置电机参数:根据机械设计计算并配置电子齿轮、每转脉冲数和移动量等。
伺服驱动器参数:
配置IP地址和设备名(针对总线型)。
设置控制模式为“位置控制”。
校准电子齿轮比(指令脉冲数与电机实际移动量的比例关系),这直接影响定位精度。
3. 程序编写
使能控制:通过程序发出“伺服ON”信号,使能伺服电机。
原点回归:这是每次启动或发生位置偏差后,建立机械坐标基准的关键步骤。
定位控制:根据控制指令,绝对定位 (DDRVA)用于移动到坐标系中的绝对位置,相对定位 (DDRVI)则用于在当前基础上移动一段距离。
JOG点动:实现手动正反转,便于调试。
状态监控:读取并处理伺服的就绪、忙碌、定位完成、报警等状态信号。
故障处理:编写报警复位逻辑,确保系统稳定。
4. 调试与优化
参数优化:使用驱动器软件的“一键式调整”功能,快速优化伺服系统的刚性、惯量比等性能参数。
程序验证:逐步测试各个功能块,确保动作符合预期。
关键功能详解
原点回归 (Homing):用于建立机械坐标系与电气坐标系的零点映射。常用方法有:
近点DOG型:使用机械挡块作为减速信号,精度高,适合大多数应用。
数据设定型:通过参数直接设定原点位置,适用于无挡块的场合,但精度较低。
计数型:利用Z相信号精确定位,精度最高,适合高精度定位需求。
JOG点动速度调节:可用于调试时的精确定位。在QD75模块中,可以通过指令向特定的缓冲存储器写入不同的速度值,实现多档调速。
绝对定位 vs. 相对定位:
绝对定位:指令中指定的是目标点在坐标系中的绝对坐标。执行时,系统会计算从当前位置到该绝对位置的距离和方向。
相对定位:指令中指定的是相对于当前点的移动量和方向。例如,当前在100mm处,执行“+50mm”的相对定位,则会移动到150mm处。
SERVO ERROR处理:当驱动器检测到过载、超速、编码器故障等问题时,会输出SERVO ERROR信号。需要编写故障诊断和复位逻辑,确保系统安全。
常见问题与故障排查
电机不转:检查“伺服ON”信号是否已激活、脉冲输出线路是否正确、驱动器的使能及控制模式设置是否正确。
定位不准:核实电子齿轮比和每转脉冲数是否与机械参数匹配。绝对值系统需确认原点位置是否丢失。
电机振动/噪音大:尝试使用驱动器软件自动优化增益参数,或手动调整刚性设置。
原点回归失败:检查近点DOG、零点等传感器信号是否正常,并核实原点回归速度和方向的参数设置。
不同品牌与实现方案对比
下表对比了三菱和西门子两大主流品牌在实现伺服定位时的常见方案:
| 三菱 | PLC内置定位 | FX5U等 | 适用于简易单轴控制,节省成本。 |
| 定位模块 | QD75, QD77, FX3U-20SSC-H | 适用于多轴、复杂运动控制,性能强大。 | |
| 软件工具 | MR Configurator2 | 用于伺服驱动器参数设置与调试。 | |
| 西门子 | 运动控制功能块 (基于PROFINET) | S200 PN, V90 PN等 | 使用FB284 (SINA_POS) 等标准化功能块,通过111报文控制,编程高效。 |
| 驱动器内置定位 (EPOS) | S200, V90等 | 位置计算在驱动器内部完成,减轻PLC负荷,响应更快。 | |
| 传统定位模块 | FM 453, FM 353 | 用于步进或伺服电机,技术成熟。 | |
| 品牌 | 方案类别 | 常见模块/型号 | 特点 |
|---|
安全注意事项
务必在程序中处理好正负限位信号,防止电机超出行程范围导致机械损坏。
对于有垂直轴的设备,必须正确编写刹车控制程序,防止断电时负载坠落。
首次运行或调整参数时,建议将电机与负载脱开或将速度、扭矩限制在较低水平。
-
电机
+关注
关注
145文章
9694浏览量
154732 -
定位模块
+关注
关注
0文章
109浏览量
17092
发布评论请先 登录
伺服主轴和变频主轴的比较
伺服定位跑偏分析及解决方法
云台伺服驱动硬件设计规范与实现手册
告别定位不准!高稳温补晶振为卫星定位模块赋予“定”力

泡沫起升仪步进/伺服电机细分驱动技术:实现冲程毫米级定位的电子方案

伺服电机的控制方式简述

加速度计伺服电路模块原理与应用
GPS北斗双模定位模块移植
爱普生温补晶振实现卫星定位模块快速定位
伺服电机和步进电机的核心区别

常用伺服参数的调整

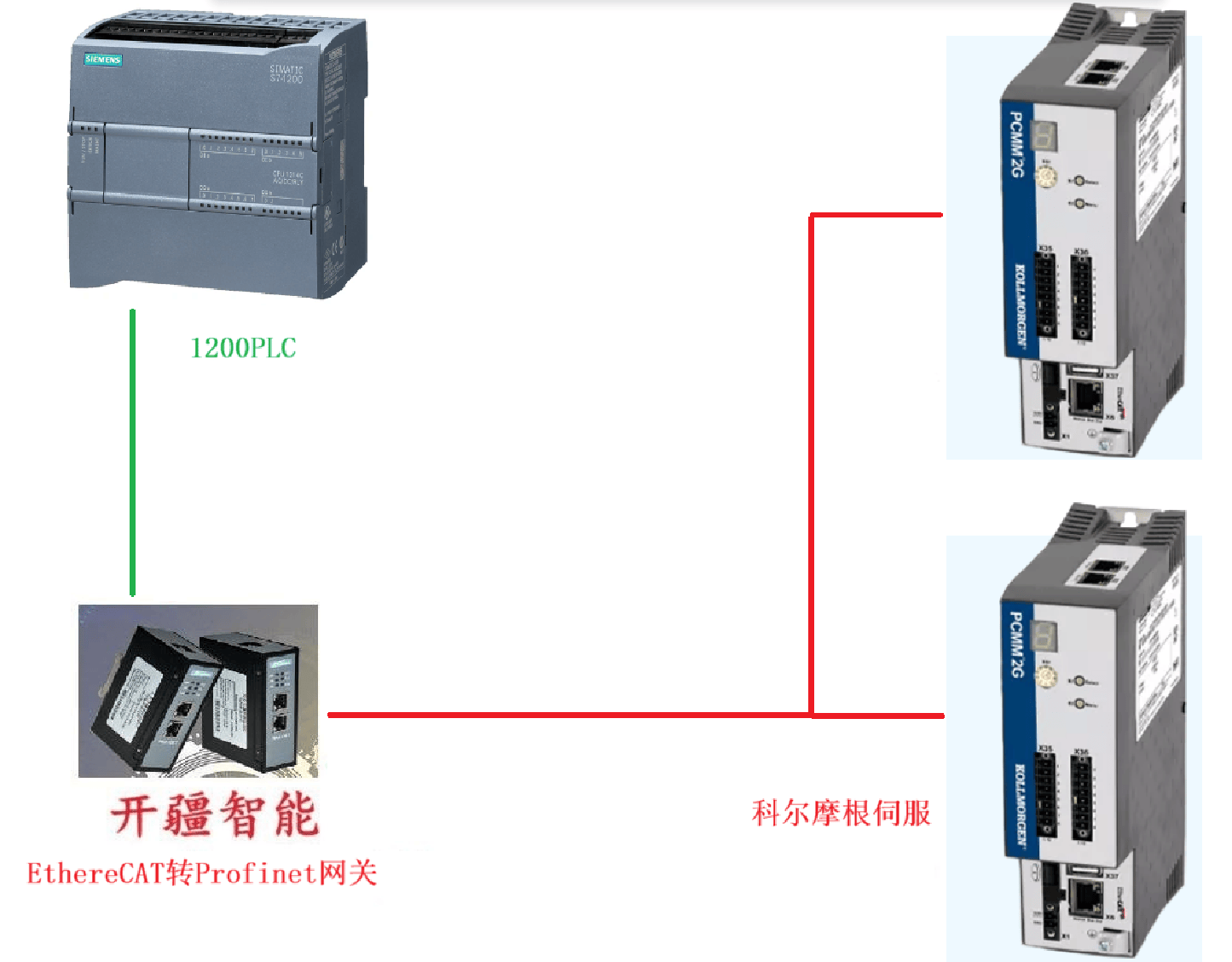
开疆智能Profient转EtherCAT网关连接科尔摩根伺服配置案例
多摩川17位绝对式编码器实现伺服系统纳米级定位精度

思为无线UWB定位测距模块简介--厘米级精准定位

新品!国产单北斗卫星定位模块,磐启微ChirpIoT扩频模块




评论