 KUKA C4机器人:为宏启用或阻止内联窗体USER
KUKA C4机器人:为宏启用或阻止内联窗体USER

对于不同的宏类型,可以配置内联表单USER是否可用。默认情况下,USER在以下宏中可用:
•自定义宏
•宏观步骤(全部)
makrotrigger
•宏触发器
使用默认设置文件VW_User.config
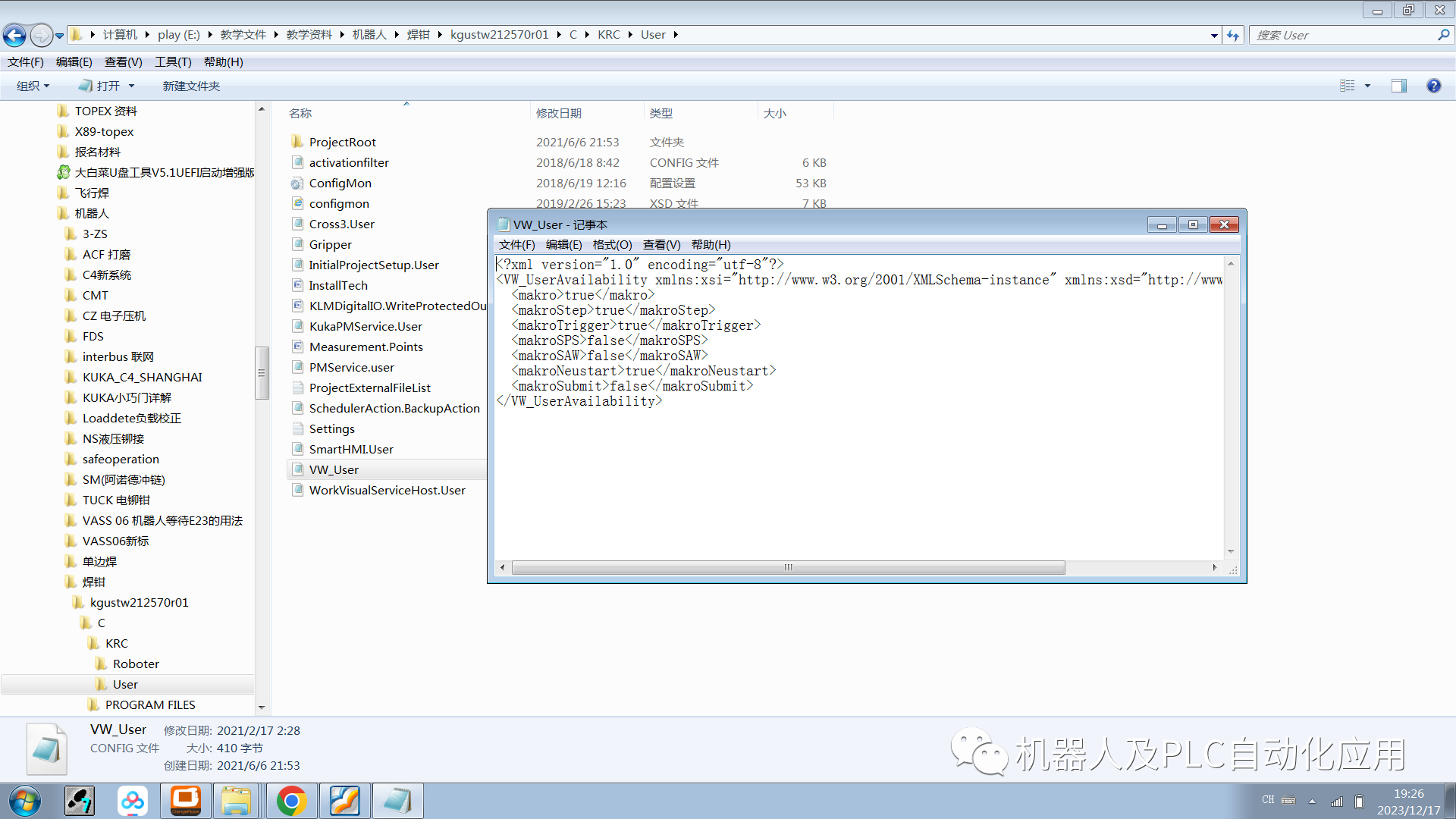
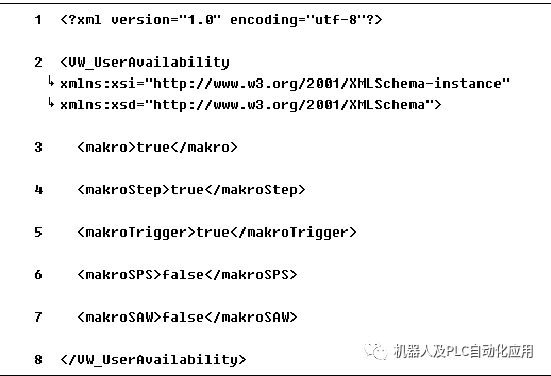
1.在智能HMI上C:KRCUSER目录下的文件VW_USER。打开CONFIG。
该文件包含每个宏类型的一行,类型名称和值为true或false。
2.要使内联表单USER在宏中可用,请将该值设置为true。
若要锁定宏中的内联窗体,请将值设置为false。
3.使用关闭图标关闭文件。对于是否应保存更改的安全问题,回答“是”。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
触发器
+关注
关注
14文章
2065浏览量
63645 -
HMI
+关注
关注
9文章
741浏览量
52500 -
KUKA机器人
+关注
关注
4文章
144浏览量
10129
原文标题:KUKA C4机器人:为宏启用或阻止内联窗体USER
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
详细应用场景
高精度力控与柔顺操作(上肢与手部)
场景描述:机器人需要抓取鸡蛋、拧螺丝、装配精密零件或使用人类工具。若仅靠位置控制,极易损坏物体或自身。
传感器作用 :实时感知末端工具与工件接触
发表于 05-20 17:40
基于米尔RK3576核心板的国产割草机器人解决方案
GPIO中断引脚连接升降传感器和倾倒传感器,一旦检测到机器人被抬起或倾斜,芯片立即下达刀片急停指令,符合国内CCC安全认证要求。
4. 人机交互:国产通信与OTA升级
通过核心板集成的Wi-Fi 6
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统机器人遇到意外阻力会硬顶,容
发表于 04-17 17:27
水下机器人测试:为深海“探路者”铸就的极限生存考验
水下机器人测试是指对遥控水下机器人(ROV)、自主水下机器人(AUV)或混合式水下机器人在研发、定型或

以空间为桥,开启人机共生新未来 —— 普渡机器人全球新总部正式启用
3月30日,深圳市普渡科技股份有限公司(简称:普渡机器人)位于深圳的新总部办公室正式启用。作为普渡成立十周年的里程碑,这座新总部以“新坐标、新高度”为精神注脚,由创始人兼CEO张涛亲自

机器人的罪与罚
的量产,优必选、宇树科技、智元机器人等也都实现了千台级交付。在各个AI展会我们都能看到人形机器人占据C位,机器人马拉松、格斗大赛层出不穷。宇树机器人

探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能机器人的一个强大起点。
致谢: 感谢进迭时空、发烧友提供开发板,以及论坛中各位开发者分享的经验,
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度机器人控制”场景中
发表于 11-14 15:48
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由! 在追求极致效率与精度的现代汽车焊装车间,实现车身总拼、地板总成、四门两盖等核心工序的100%自动化,已成为衡量制造水平
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
发表于 10-23 05:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22

工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉淀,为不同需求的企业提供适配的




评论