 高速can和低速can区别
高速can和低速can区别

高速can和低速can区别
高速CAN和低速CAN是现今汽车行业中常用的两种CAN总线通信协议。CAN,也被称为Controller Area Network(控制器局域网络),是一种用于在车辆中各个电子控制单元(ECU)之间进行通信的标准化网络协议。虽然高速CAN和低速CAN都是基于相同的协议,但它们在速率、传输距离、适用范围和使用场景等方面有一些明显的区别。
首先,高速CAN和低速CAN的速率是不同的。高速CAN的数据传输速率通常为500kbps(千位每秒),而低速CAN的传输速率通常为100kbps。高速CAN适用于需要高数据速率进行通信的应用场景,如引擎控制系统、传感器和执行器之间的通信。低速CAN则适用于对数据速率要求较低的应用场景,如车辆的舒适性和娱乐系统。
其次,高速CAN和低速CAN的传输距离也存在差异。由于高速CAN的传输速率更高,因此在传输距离方面要求更短,一般不超过40米。低速CAN的传输距离则相对较长,可以达到100米。这是因为在传输距离较长的情况下,信号衰减和噪声干扰可能会影响高速CAN的数据传输质量。
另外,高速CAN和低速CAN的适用范围也不同。高速CAN通常用于需要进行实时数据传输的控制系统,如发动机、变速器和刹车控制系统。它能够提供高速、可靠的数据传输,以确保实时性和精确性。低速CAN则更多用于非关键控制系统,如车辆的娱乐和舒适性功能。这些控制系统对数据传输速率和实时性的要求相对较低,低速CAN能够满足这些要求。
最后,高速CAN和低速CAN的使用场景也不同。高速CAN通常在需要大量数据交换的子系统中使用,例如汽车引擎控制单元、传输控制单元和ABS(防抱死制动系统)等。低速CAN则更常见于需要对信息传输进行较少精确控制的系统中,例如车内照明系统和音响系统。
综上所述,高速CAN和低速CAN作为现代汽车行业中常见的CAN总线通信协议,具有不同的速率、传输距离、适用范围和使用场景。高速CAN适用于需要高数据速率、实时性和精确性的控制系统,而低速CAN适用于对数据速率和实时性要求相对较低的控制系统。汽车行业根据不同的需求选择合适的CAN总线协议,以满足车辆系统间通信的要求。
-
CAN总线
+关注
关注
145文章
2020浏览量
134662 -
通信协议
+关注
关注
28文章
1073浏览量
41866
发布评论请先 登录
CAN集线器有什么作用
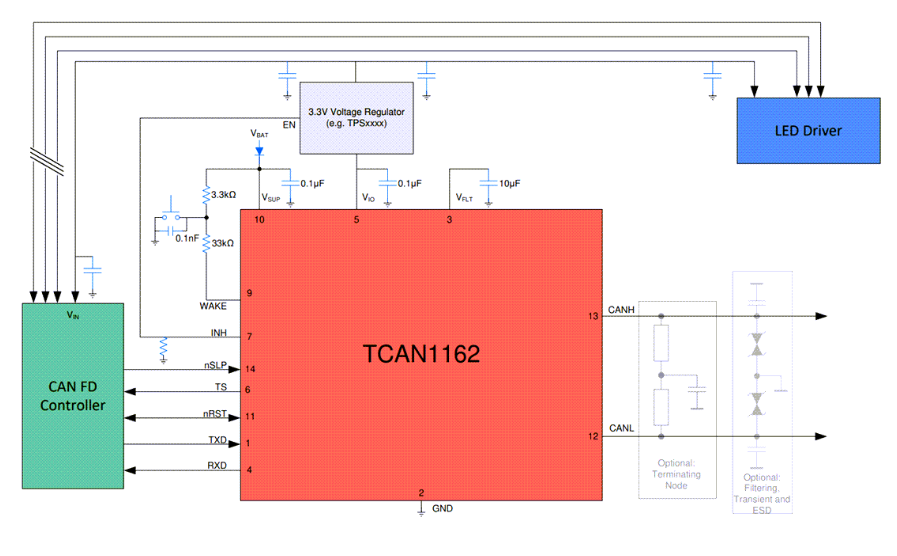
TCAN1162-Q1汽车级CAN FD收发器技术解析
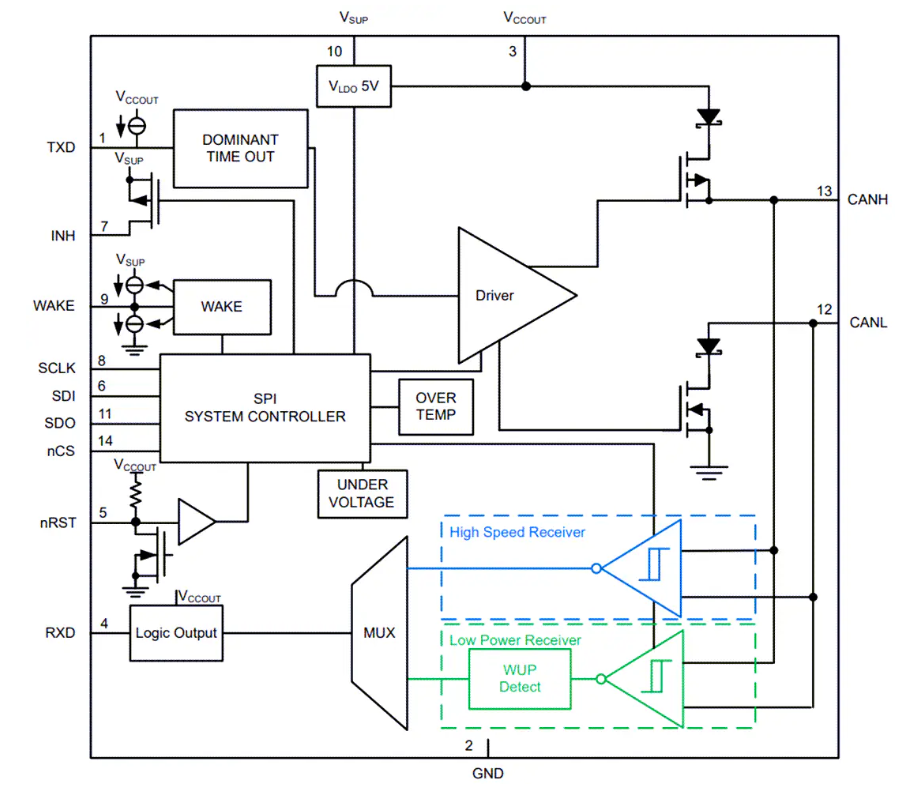
汽车级CAN FD系统基础芯片TCAN1167-Q1技术解析
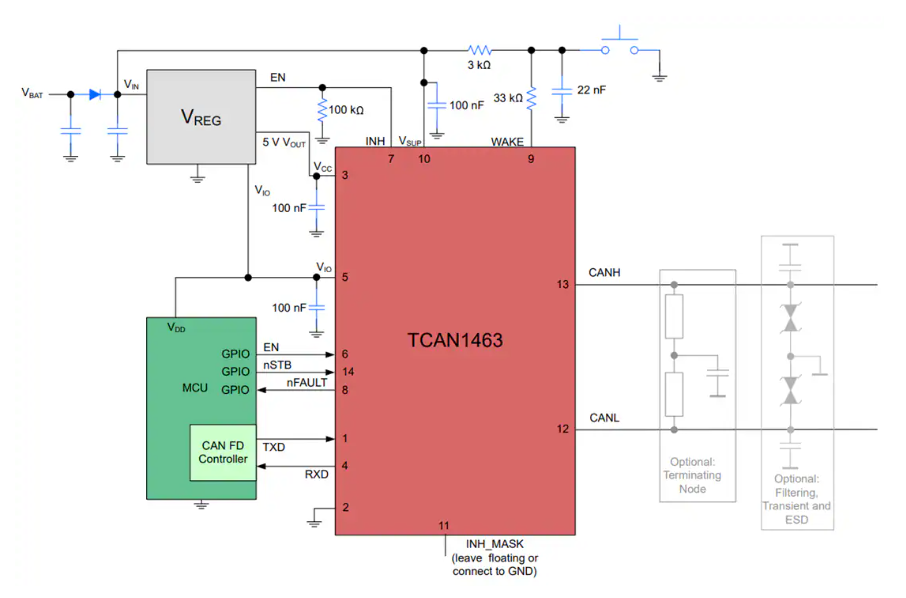
TCAN1463-Q1汽车级高速CAN FD收发器技术解析与应用指南
【米尔-RK3562开发板试用评测】can测评
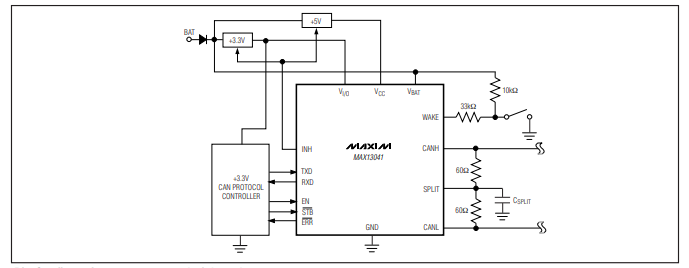
MAX13041具有±80V故障保护的高速CAN收发器,提供低功耗管理和CAN唤醒功能技术手册





ADS1274低速模式和高速模式的区别是什么?






 工商网监
工商网监
评论