 科聪停车移动机器人整体解决方案!
科聪停车移动机器人整体解决方案!
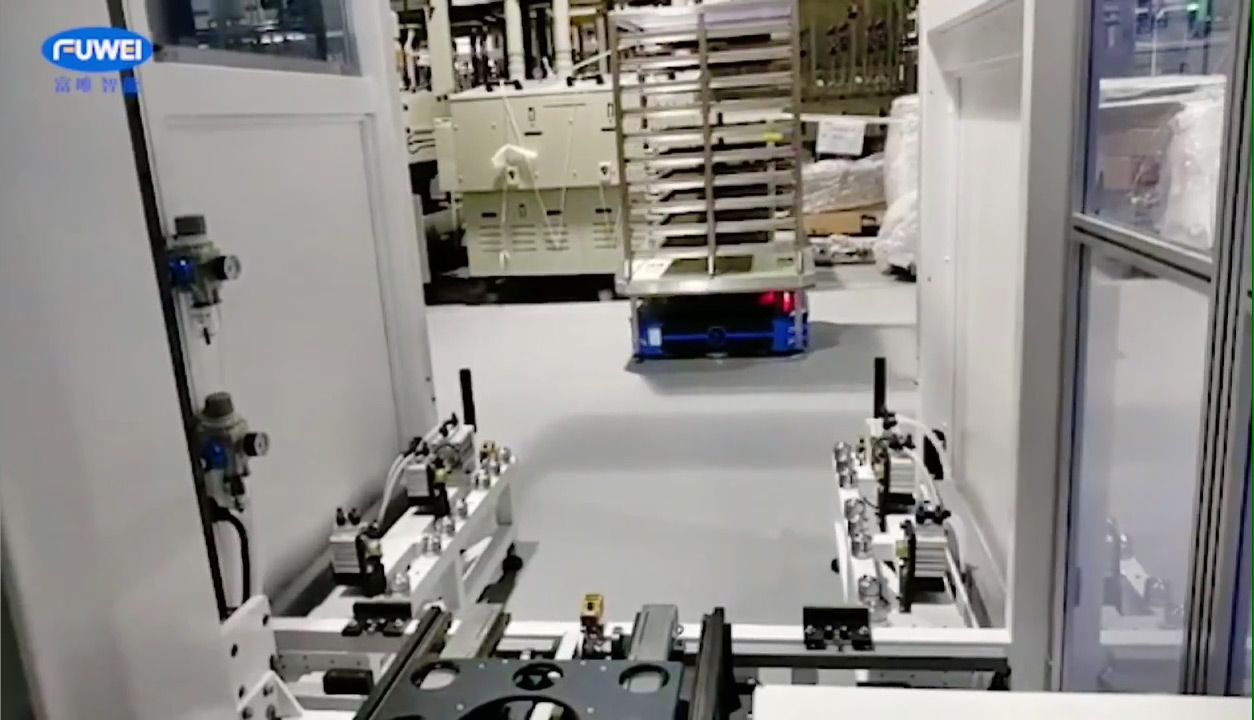
停车机器人是用于在停车场或车库等场所中进行车辆的自动停放和取车操作。随着智能交通和智能城市的发展,停车机器人在解决停车难、提高停车效率和减少停车空间浪费等方面具有广阔的应用前景。

科聪停车机器人解决方案:
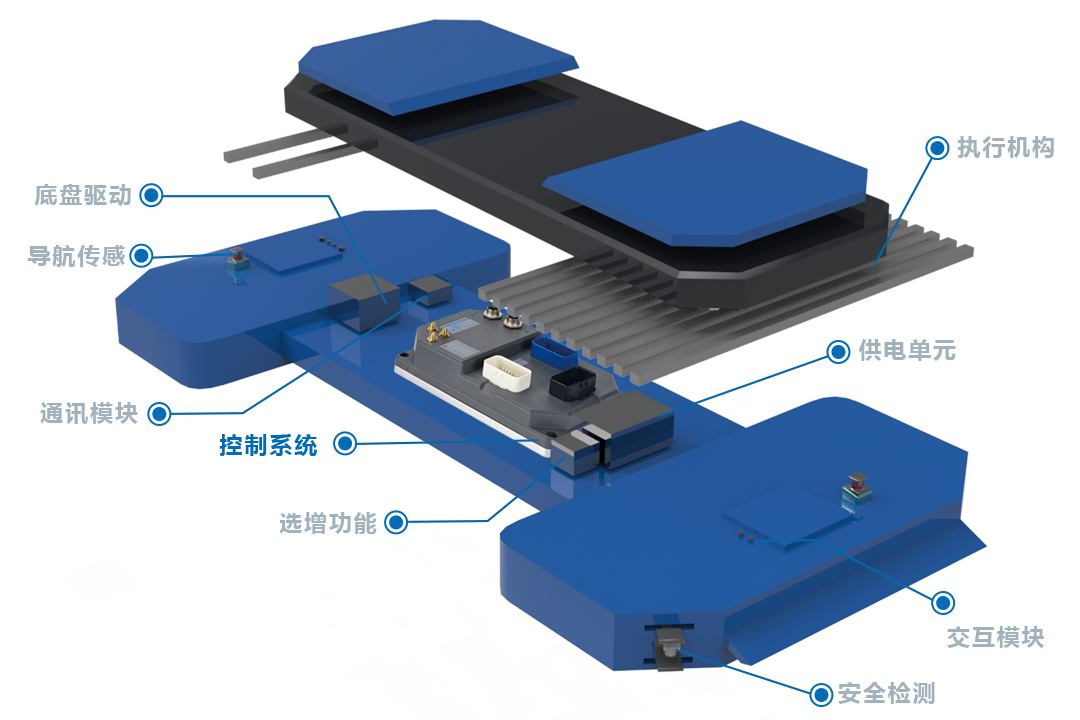
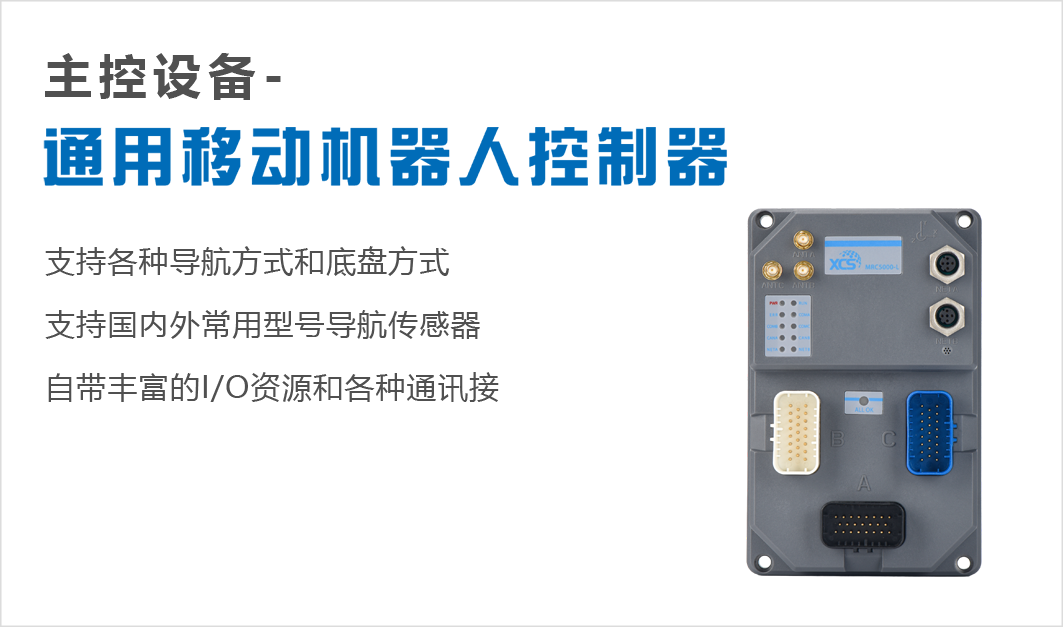
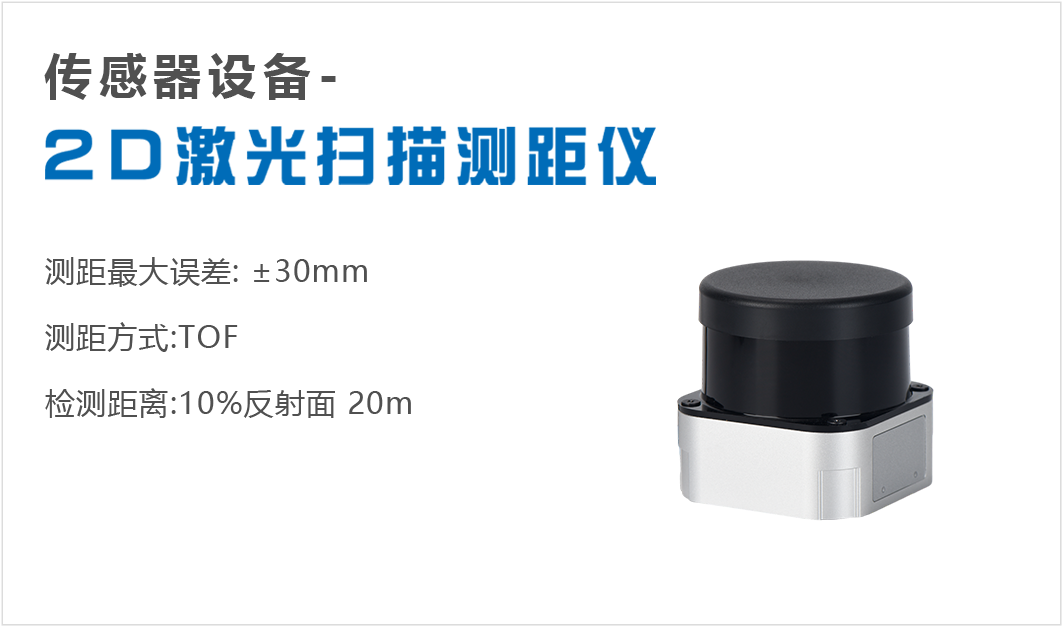
本方案中核心部分采用的是科聪通用移动机器人控制器,导航方式一般选择激光导航,用以实现行驶路径可灵活多变和高精度导航的需求。以通用移动机器人控制器为核心的整体解决方案已在停车机器人领域广泛使用。

方案优势:
体积紧凑
停车移动机器人相对普通移动机器人车型设计较薄,这对控制器的设计和安装尺寸提出了更高的要求。科聪控制器设计紧凑,可方便安装于任意款停车机器人。
高精度控制
停车机器人需具备高精度的停放,不可出现车辆剐蹭问题。在机器人本体精度支持下,科聪系列控制系统的精度可达到±5mm以内,确保停车准确无误。
支持可拓展
可根据用户需求进行功能定制,方便应对各类复杂场景,赋能停车机器人更具竞争力。
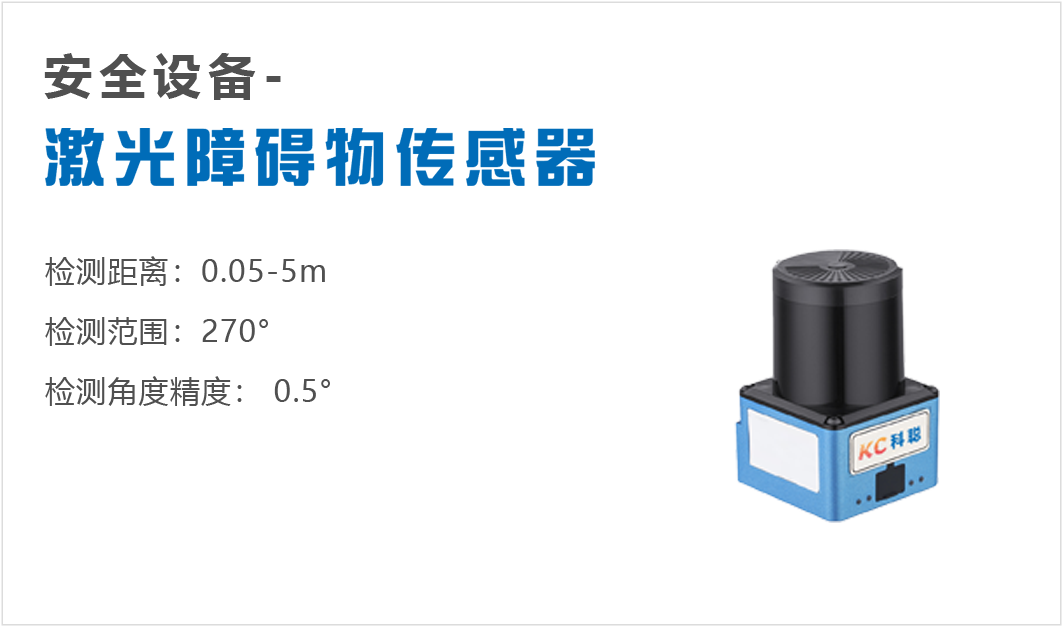
支持拓展标志物二次定位、导航激光辅助避障、3D视觉避障等多种功能,并可根据用户需求进行定制。方便应对各类复杂场景,赋能移动机器人更具竞争力。
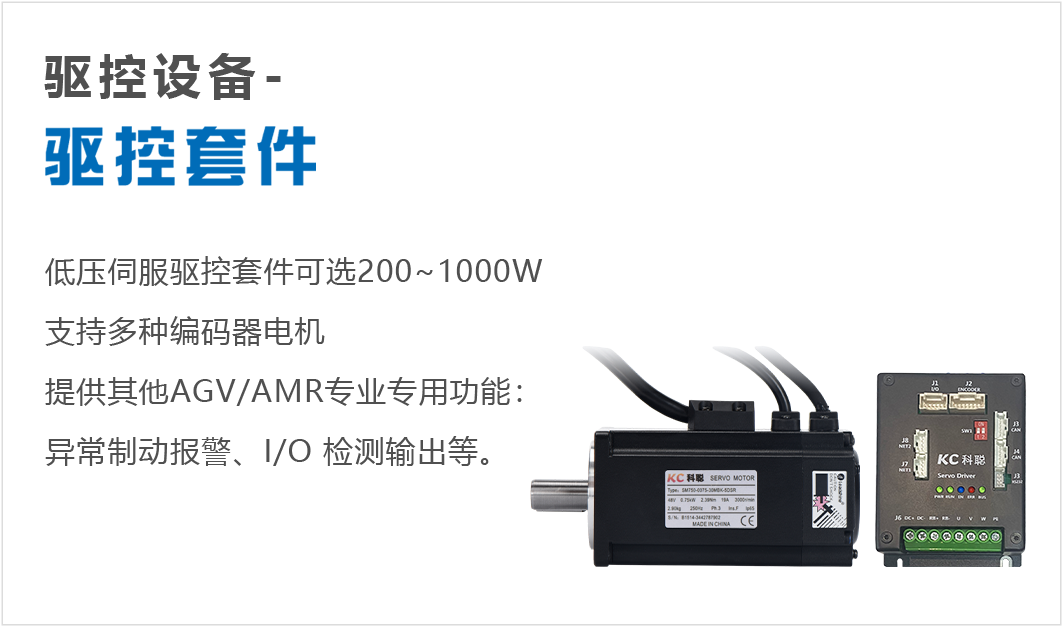
方案产品:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27033浏览量
201400 -
移动机器
+关注
关注
0文章
7浏览量
7270 -
agv机器人
+关注
关注
1文章
58浏览量
6445
发布评论请先 登录
相关推荐
自主移动机器人(AMR)功能和特点
复合机器人是一种集成了移动机器人、协作机器人和机器视觉等多项功能的新型机器人。它的开发目的是为了解决工厂物流中最后一米的问题,提供智能搬运

科聪协作科聪协作(复合)移动机器人整体解决方案
协作(复合)移动机器人(AGV/AMR)相较传统工业机器人具有更加安全和简单的工作优势,具备较强的发展潜力。协作(复合)移动机器人安全性和操作的简洁性、灵活性不断提高,优势得到了充分发挥,在越来越多


科聪协作(复合)移动机器人整体解决方案
协作(复合)移动机器人(AGV/AMR)相较传统工业机器人具有更加安全和简单的工作优势,具备较强的发展潜力。协作(复合)移动机器人安全性和操作的简洁性、灵活性不断提高,优势得到了充分发挥,在越来越多
基于Matlab和VR技术的移动机器人建模及仿真
,虚拟模型准确地模拟了真实移动机器人的动力学特征 ; 通过对模型的参数修改 ,为实现对真实机器人的最优控制和设计提供了可信的参考方案
发表于 09-20 06:24
叉式移动机器人(AGV/AMR)整体解决方案
叉式移动机器人(AGV/AMR)是在叉车上加载各种导引技术,构建地图算法,辅以避障安全技术,实现叉车的无人化作业。▲叉式移动机器人无人化作业▲叉式移动机器人常见车型叉式移动机器人在行业

移动机器人的发展现状及趋势 HMS产品在移动机器人的应用
如今,无论是在工厂的仓库,酒店的走廊,或是家中的客厅,我们都能看到移动机器人(AGV/AMR)的身影。它们因更便宜、更安全且比真实工人更高效而受大受欢迎。 这些机器人增加了企业的灵活性,允许


【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。
基于整个智能制造的发展
发表于 06-28 09:52
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
随着机器人技术的不断发展,我们可以在许多简单重复,危险的岗位上看到机器人的身影,移动机器人凭借其在复杂环境下工作,具有自行感知、自行规划、自我决策功能的能力,它可以在不同的环境中移动
发表于 06-28 09:36
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。基于整个智能制造的发展,移动

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
移动机器人导航是指移动机器人确定自己在地图参考系中的位置后,自动规划出通往地图参考系中某个目标位置路径并沿着该路径到达目标位置点的能力,是移动机器人行动能力的关键。

「车型分析」移动机器人控制系统典型应用车型 ——叉式移动机器人(AGV/AMR)
叉式移动机器人(AGV/AMR)是一种常见的移动机器人类型,它摆脱传统的人车操作,自动导航行驶,具有强大的柔性和智能性。叉式移动机器人(AGV/AMR)不同于传统叉车,它无需人工驾驶运行。具有智能化

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成
移动机器人是一个多功能于一体的综合系统,内容涵盖了传感器技术、自动化技术、信息处理、电子工程等,它集环境感知、动态决策与规划于一体,是目前科学技术发展最活跃的领域之一。移动机器人的各种组件之间需要






 工商网监
工商网监
评论