 ROS2中自带例程测试
ROS2中自带例程测试

如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:我们之前也安装了ROS2系统,那ROS2的原生功能还可以正常运行么?
我们再来试一试ROS2中自带的一个例程。
和刚才一样打开两个终端,这里我们需要source一下ROS里的环境变量。
该环境变量我们刚才已经设置了过软连接,所以配置过程中它也会配置ROS2的功能包路径。
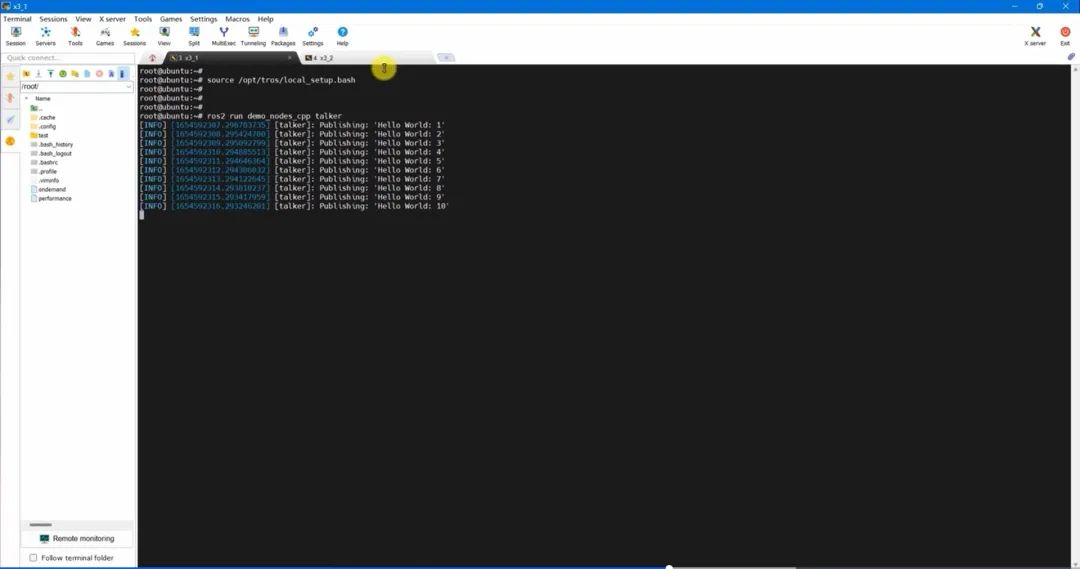
在终端1输入命令:
$ source /opt/tros/local_setup.bash
在终端2,也输入同样的命令,配置环境变量的脚本:

接下来运行两个ROS2的节点。
这两个节点的功能包是属于ROS2里的功能包,可以直接调用到。
我们来尝试一下输入命令ros2 run,再输入功能包名称,如果按Tab自动补全文件名,说明可以找到对应的这个功能包:
ros2 run demo_nodes_cpp talker
talker也是一个发布者节点。按回车运行,可以看到终端1的发布者节点以每秒1次的频率发布消息。
同样,我们到终端2中打开订阅者节点:
ros2 run demo_nodes_cpp listener
回车运行,很快两个终端间就建立了通讯。
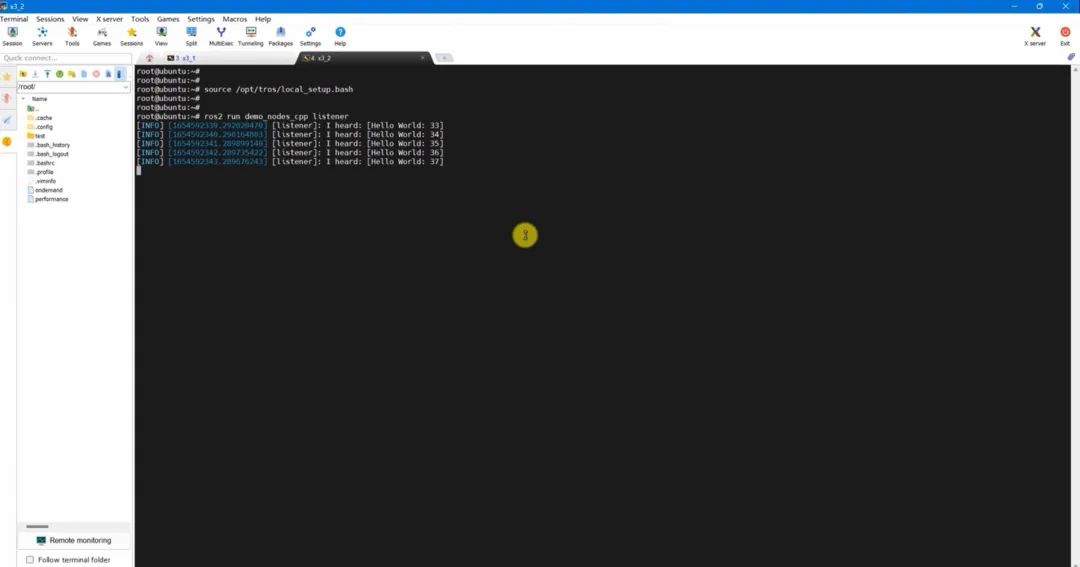
这样就使用ROS2里的例程实现了话题通信连接,只不过这里我们使用的就是ROS2原生的功能包了,而不是TogetherROS™·Bot的功能。
通信系统已经没问题了,但看上去似乎还不太直观。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31521浏览量
223921 -
程序
+关注
关注
117文章
3849浏览量
85509 -
ROS
+关注
关注
1文章
296浏览量
18888
发布评论请先 登录
相关推荐
热点推荐
RK3562 单板机嵌入式 ROS2 开发指南:环境搭建与工程编译
本文为创龙科技RK3562 单板机 ROS2 Foxy 开发指南,涵盖系统测试与开发全流程。详细说明 Python/C++ 节点通信、turtlesim 可视化测试的实操指令,以及上位机开发环境搭建

系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
如何在ROS2中运行小乌龟呢
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-05 06:08
基于无线wifi网络的X3派和PC虚拟机通过ROS2实现跨设备通信
1、X3派和PC虚拟机都连接无线wifi网络的情况下通过ROS2实现跨设备通信多机通信是ROS的基础能力之一,相比于ROS1,ROS2通过非常简单的配置即可实现多机通信。对于两个安装了
发表于 07-13 15:13
【昉·星光 2 高性能RISC-V单板计算机体验】五:在 VisionFive2 上体验 ROS2 humble
Call `ros2 <command> -h` for more detailed usage.
二、基础命令测试
ros2 pkg
执行 ros2 pkg
发表于 09-04 04:59
Linux嵌入式开发笔记(六)在ROS2中运行小乌龟实例
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-02 15:21
•10次下载

Window10怎么安装ROS2
Window10怎么安装ROS2,以下的操作都要管理员的权限,我可以提前剧透,我应该应该是没有安装上DDS,应该是算安装好了80%的样子。
了解ROS2是什么
ROS2是从底层构建时便考虑使其适用于商业用途,它是机器人操作系统现有框架的重构,经过优化以适用于工业应用,开发可在新的应用中进行扩展,如移动机器人、无人机群和自动驾驶汽车。
DDS在ROS2中的应用
DDS在ROS2中的应用 DDS在ROS2系统中的位置至关重要,所有上层建设都建立在DDS之上。在这个ROS2的架构图中,蓝色和红色部分就是

在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还是会复用ROS2

创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明
本文围绕创龙科技研发的评估板,详解 ROS2 系统使用方法。涵盖 ROS2 环境搭建、核心概念讲解、节点通信测试、功能包创建与编译,以及可视化工具 RViz 的使用,还包括基于评估板的 ROS

初识ros2 功能包建立与可执行文件的配置
本文介绍了ROS2程序的两种启动方式:直接运行可执行文件(ros2 run)和使用启动文件(ros2 launch)。重点讲解了Python软件包的结构,包括package.xml、setup.py
开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统
本文介绍基于Ubuntu22.04安装ROS2机器人系统教程,并附带详细测试方法,基于触觉智能RK3576核心板方案,使用配套开发板PurplePiOH2演示。ROS、




评论