 Window10怎么安装ROS2
Window10怎么安装ROS2

一朝沐杏雨,一生念师恩
个人建议找个Linux装去,这篇文章纯属折腾。。。全看的是官方的文档。
以下的操作都要管理员的权限,我可以提前剧透,我应该应该是没有安装上DDS,应该是算安装好了80%的样子。
在win这里右键,使用管理员的权限
choco install -y vcredist2013 vcredist140
巧克力如何安装我就不写了,自己去看看,安装好以后就执行这个命令就行
安装好的时候会有的日志
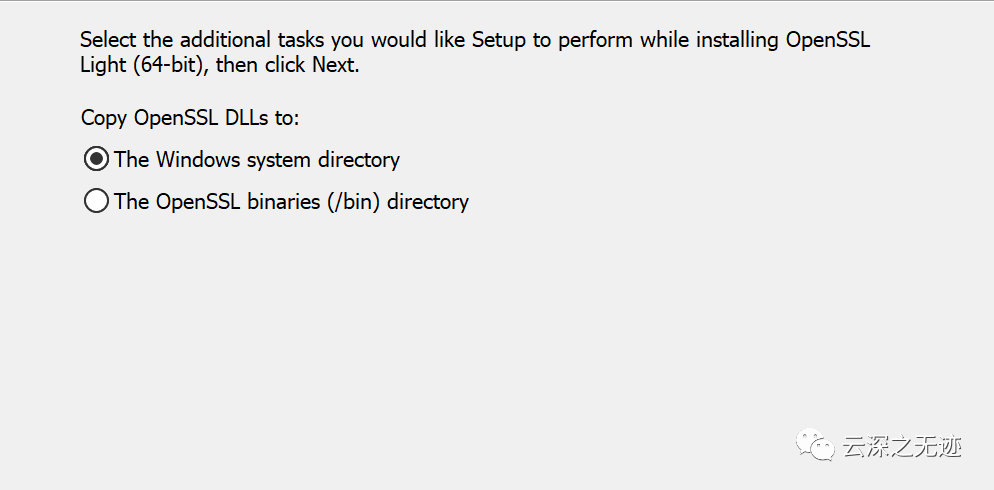
这个是SSL的安装,按照我写的选择就行
我哪有钱
C:\\Program Files\\OpenSSL-Win64\\bin
可以确定一下你的安装目录是不是这个
是,那你就执行我下面的命令就行

输出
OpenCV也是一个特别的供应的版本,这里就需要你下载一下
https://github.com/ros2/ros2/releases/download/opencv-archives/opencv-3.4.6-vc16.VS2019.zip
解压到C盘的根目录下就行
C:\\opencv\\x64\\vc16\\bin
这个就是在我的电脑上面安装的路径
https://github.com/ros2/choco-packages/releases/tag/2022-03-15

这里就是一些需要离线安装的库
choco install -y -s C:\\Users\\yunswj\\Downloads\\ttt asio cunit eigen tinyxml-usestl tinyxml2 bullet
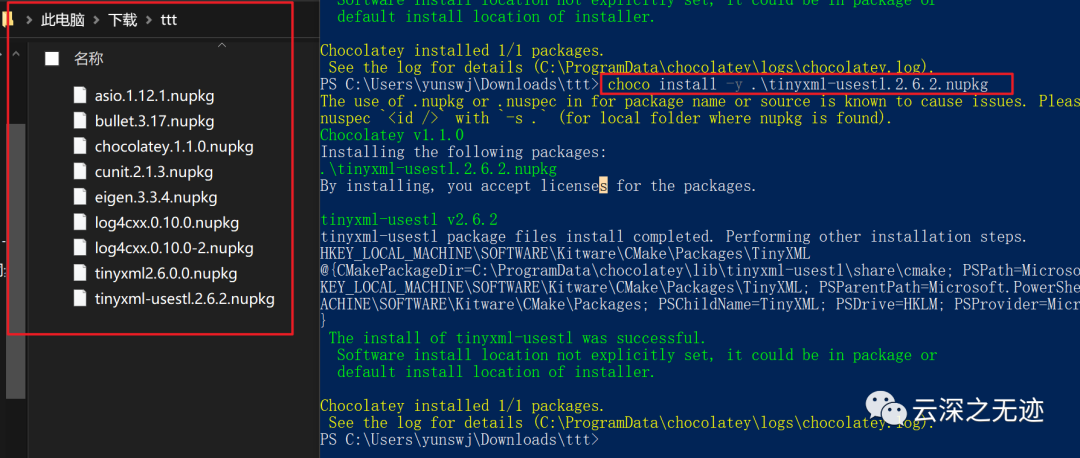
先把要安装的库放在一个目录下面,然后导航安装
python -m pip install -U catkin_pkg cryptography empy importlib-metadata lark==1.1.1 lxml matplotlib netifaces numpy opencv-python PyQt5 pillow psutil pycairo pydot pyparsing==2.4.7 pyyaml rosdistro
依赖的库安装一下
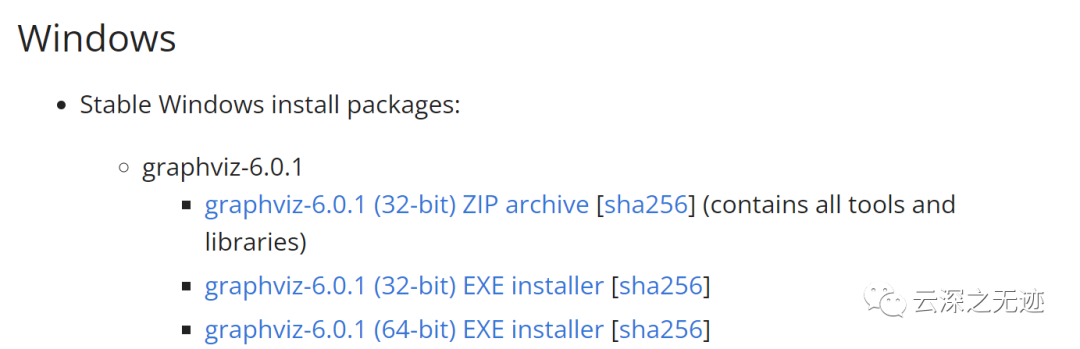
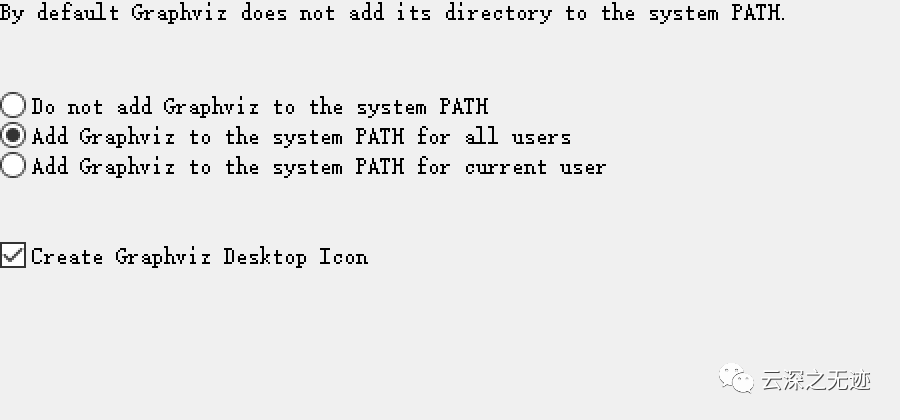
安装文档也需要安装这个东西
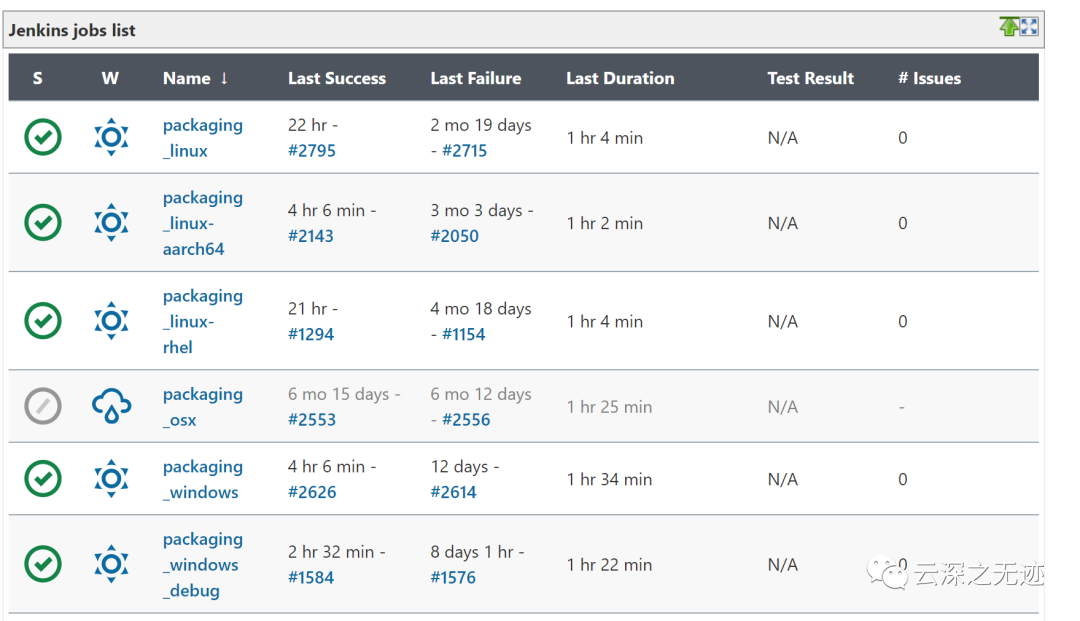

以上就是已经编译好的ROS2
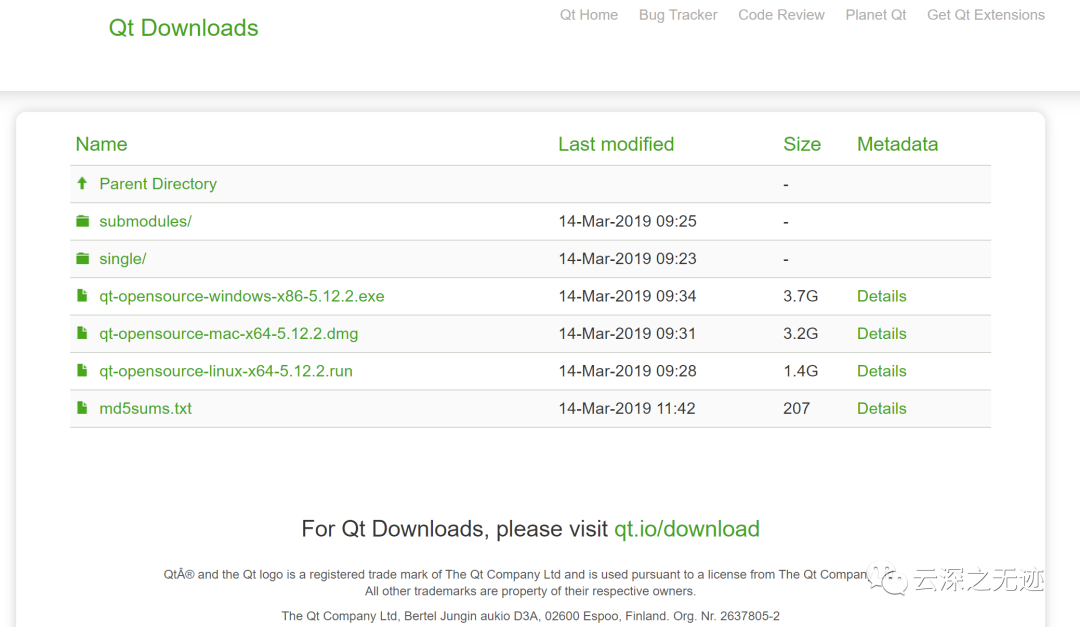
需要安装QT5
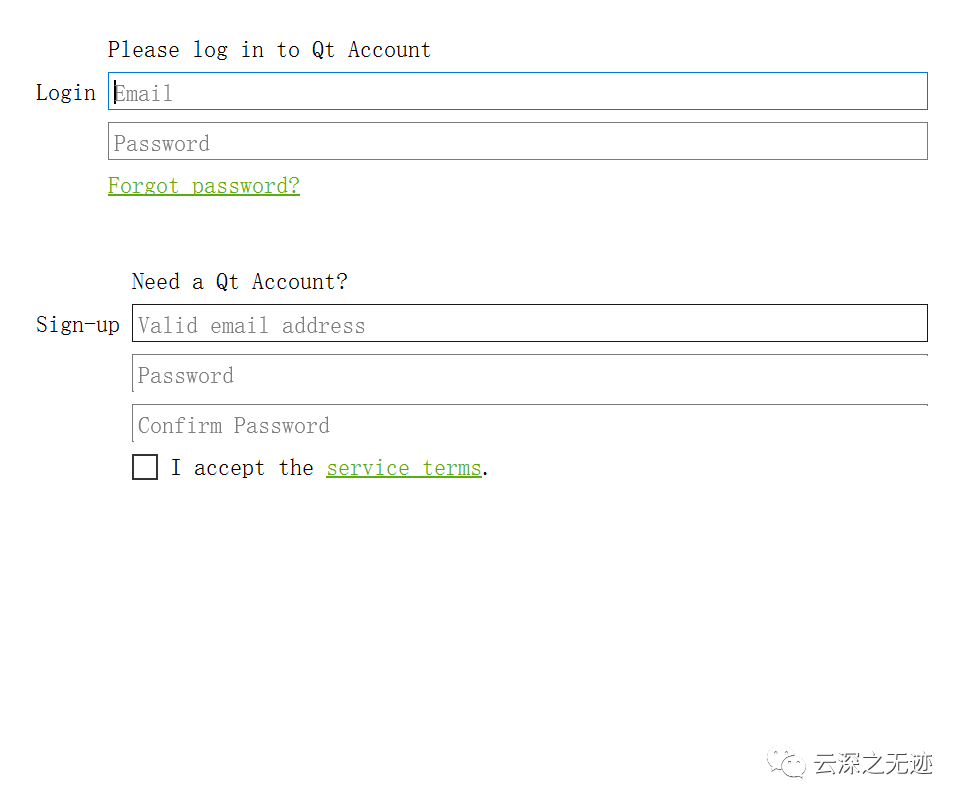
第一次使用要注册
然后就是申请
在官网的最下面可以申请
安装作业
位置
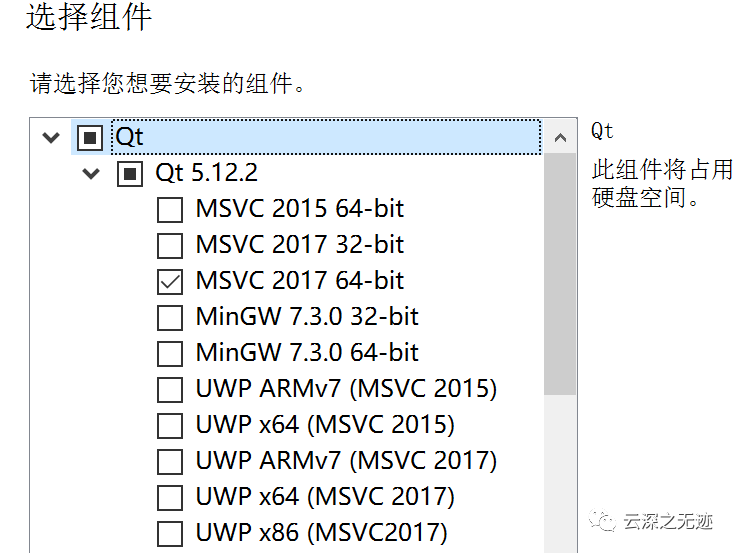
安装的内容
下一步
安装好的样子,下面是需要执行的添加环境的命令
setx /m Qt5_DIR C:\\Qt\\Qt5.12.12\\5.12.12\\msvc2017_64
setx /m QT_QPA_PLATFORM_PLUGIN_PATH C:\\Qt\\Qt5.12.12\\5.12.12\\msvc2017_64\\plugins\\platforms

OK
在ROS的解压文件夹下看下有没有安装脚本文件
call C:\\dev\\ros2-package-windows-AMD64\\ros2-windows\\local_setup.bat

报错了,对吧,修一下
看了半天没有看明白,Ubuntu上面的说什么DDS?为什么WIndow下的要钱???
后面我也没心情搞了,这个是windows是真的不适合搞开发。
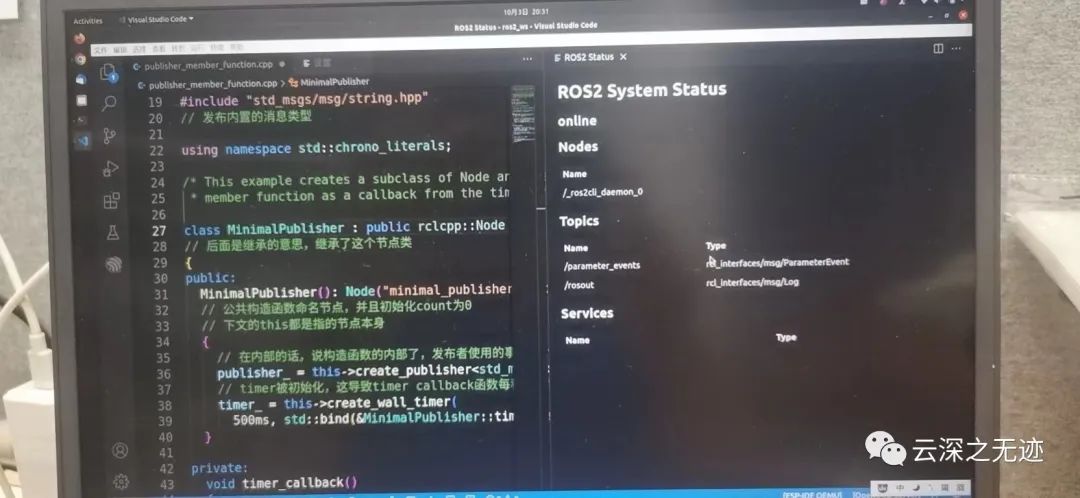
ubuntu下几个命令就安装好了,快乐的写代码
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
操作
+关注
关注
0文章
43浏览量
19250 -
DDS
+关注
关注
22文章
688浏览量
156858 -
Window10
+关注
关注
0文章
9浏览量
4512
发布评论请先 登录
相关推荐
热点推荐
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
请问一下,百度文库资料里面,下图所示的系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?与前面4GB版本的镜像有什么区别?
发表于 03-01 23:06
米尔RK3576成功上车!ROS2 Humble生态系统体验
当RK3576的强劲“大脑”(四核A72+四核A53)与强大的GPU、VPU、NPU加速模块相遇,一场高性价比的机器人开发革命正在悄然发生。我们成功将完整的Ubuntu 22.04与ROS2
发表于 01-15 18:30
如何在ROS2中运行小乌龟呢
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-05 06:08
【昉·星光 2 高性能RISC-V单板计算机体验】四:在 VisionFive2 上安装 ROS2 humble
在 VisionFive2 上安装 ROS2 humble
ROS(Robot Operating System)是一种用于编写机器人软件的灵活框架。它是一个工具(tools)、库
发表于 09-04 03:33
【昉·星光 2 高性能RISC-V单板计算机体验】五:在 VisionFive2 上体验 ROS2 humble
在 VisionFive2 上体验 ROS2 humble
一、系统准备
参考 在 VisionFive2 上安装 ROS2 humble
发表于 09-04 04:59
微软宣布Window10将正式引入机器人操作系统
日前,在西班牙召开的第七届机器人操作系统开发者大会(ROSCon 2018)上,微软宣布Window10正式引入机器人操作系统(ROS)。ROS是由Willow Garage 和斯坦福人工智能实验室维护的开源系统,用于机器人标准
window10卸载软件_window10怎么改管理员名称
window10卸载软件 自微软发布win10预览版系统,下载安装win10系统成为潮流,一时间各种安装教程满天飞,不论是双系统
Linux嵌入式开发笔记(六)在ROS2中运行小乌龟实例
在ROS2中运行小乌龟,其实主要就是安装两个工具,turtlesim和rqt。A: 安装turtlesim。输入【sudo apt update】输入【sudo apt install
发表于 11-02 15:21
•10次下载

ROS2中自带例程测试
如果你是一个ROS2的开发者,可能对刚才我们使用的ROS2命令比较熟悉,这时你可能也会产生一个问题:我们之前也安装了ROS2系统,那ROS2

在TogetherROS中如何安装ROS2功能包
安装ROS2功能包 接下来,还有一个很重要的配置,那就是安装ROS2功能包,我们说TogetherROS是基于ROS2深度优化的,很多模块还

开发必看,RK3576基于Ubuntu22.04安装 测试ROS2机器人系统
本文介绍基于Ubuntu22.04安装ROS2机器人系统教程,并附带详细测试方法,基于触觉智能RK3576核心板方案,使用配套开发板PurplePiOH2演示。ROS、




评论