 镜头自动光圈马达驱动MS41908参数与替代
镜头自动光圈马达驱动MS41908参数与替代

描述
MS41908运用于摄像机镜头的聚焦,变倍,自动调节光圈的马达驱动芯片,256细分步进驱动,芯片内置光圈控制功能;通过电压驱动方式以及扭矩纹波修正技术,实现了超低噪声微步驱动。
光圈控制
特性
1) PWM 波驱动→低功耗
2) 通过寄存器可以设置每个滤波器→低噪声
3) 增益放大器周围内置无源部件→对外置部分减幅
4) 内置 8 比特 DAC 用来调整霍尔补偿
5) 内置电流 DAC 用来调整霍尔偏置电流
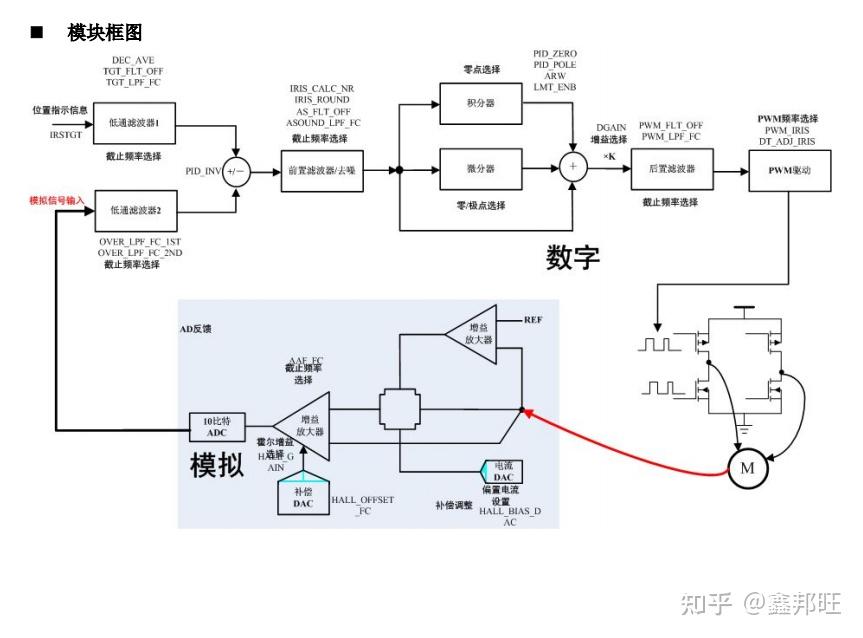
主要特点
电压驱动方式,256 微步驱动电路(两通道)
内置光圈控制电路
四线串行总线通信控制马达
内置用于 LED 驱动的 Open-drain 双系统
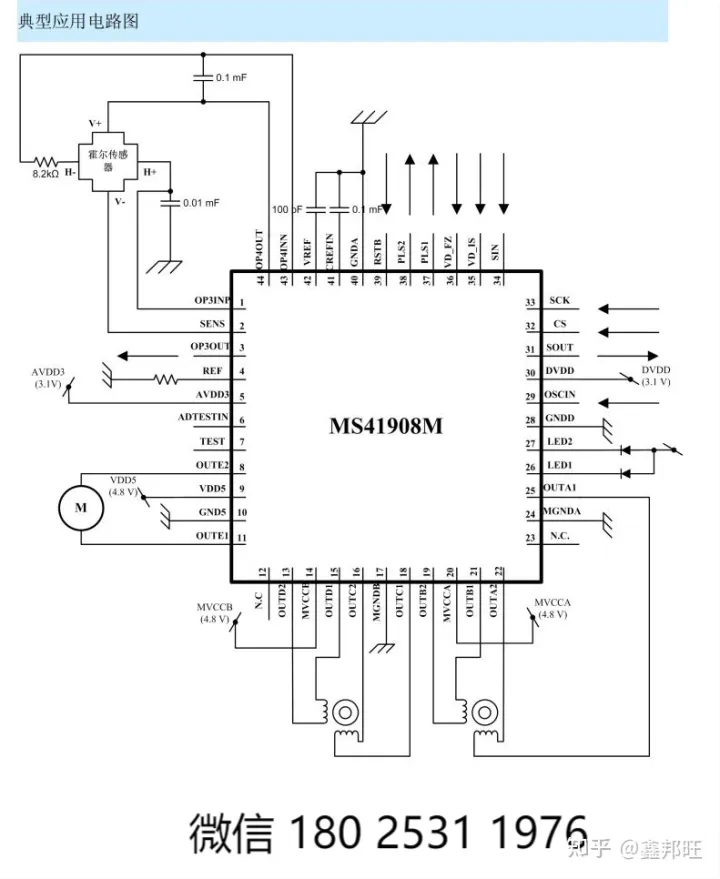
替代
MS41908 PIN= PIN AN41908
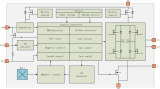
应用图
相关设置的建立时刻
建立时刻和相关时间如下所示
地址 27h 到 2Ah 的设置同 22h 到 25h 的设置相同,所以 27h 到 2Ah 的描述就省略了。如果相关寄存器被刷新,则每一个 VD 周期来到时会实现一次设置的加载刷新。当同样的设置被执行时超过 2 个 VD 脉冲时,没有必要在每个 VD 脉冲都写入寄存器数据。
DT1[7:0](起始点延时,地址 20h)
更新数据时间设置。在系统硬件复位后(39 引脚 RSTB:低→高),开始激励和驱动电机前
(DT1 结束)这段时间内,必须设置此项由于这个设置在每次 VD 脉冲来到时更新,没有必要一定在起始点延迟时内写入。
PWMMODE[4:0],PWMRES[1:0](微步进输出 PWM 波频率,地址 20h)
设置微步进输出 PWM 波频率。需要在开始激励和驱动电机前设置执行(DT1 结束)
DT2A[7:0](起始点激励延时,地址 22h)
更新数据时间设置。复位后(39 引脚 RSTB:低→高),需要在开始激励和驱动电机前被设
置执行(DT1 结束)
PHMODAB[5:0](相位矫正,地址 22h)
通过矫正线圈 A 和 B 的相位差,驱动器产生的噪声会减少。合适的相位矫正必须依据于电机
的旋转方向和速度,此设置需要随着旋转方向(CCWCWAB)或者旋转速度(INTCTABA)的变化而改变。
PPWA[7:0],PPWB[7:0](峰值脉冲宽度,地址 23h)
设置 PWM 最大占空比。设置需要在开始激励和驱动电机前被设置执行(DT1 结束)
PSUMAB[7:0](步进电机步进数,地址 24h)
1 个 VD 的时间间隔内的电机的转动次数设置。
每次 VD 脉冲输入时,电机转动所设置的次数。因此,设置次数为“0”是可以停止电机的转动。
......详细参数请参考规格书
-
镜头
+关注
关注
3文章
546浏览量
26832 -
光圈
+关注
关注
1文章
45浏览量
12567 -
马达驱动
+关注
关注
2文章
151浏览量
20923
发布评论请先 登录
基于 H 桥驱动的扫地机马达控制电路原理设计
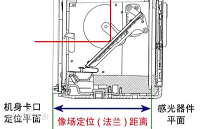
法兰距离:相机镜头系统的关键参数
高端光学防抖突破!南芯发布全链路闭环控制VCM驱动芯片
南芯科技正式发布光学防抖音圈马达驱动芯片SC29111
探索 HMC326MS8G / 326MS8GE 驱动放大器:特性、规格与应用解析
F.No/光圈数深度解析

光圈值,光圈系数,相对孔径之间有什么关系?
MS41908M,网络摄像机·监控摄像机用镜头驱动芯片(内置光圈控制)

芯圣HC20MD6208双向马达驱动芯片上市!
马达控制的‘隐形杀手’被耐达讯自动化PROFIBUS集线器终结!

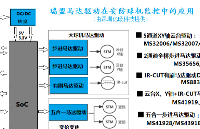
瑞盟马达驱动在安防球机监控上的应用
MS3142马达驱动开启消费类产品的智能化时代
蔡司软件 | ZEISS CALYPSO神奇功能测量手机相机结构件




评论