 搬运机器人总体设计的思路及原理
搬运机器人总体设计的思路及原理

搬运机器人是一种用于工业运动控制的设备,一般由执行系统、驱动系统和控制系统组成。搬运机器人具有结构简单、成本低廉、维修容易的优点,可以代替人进行工作,把工件由某个地方移向指定的工作位置,或按照工作要求以操纵工件进行加工。下面来了解下搬运机器人工作原理及结构组成。
一、搬运机器人的设计原理
搬运机器人为可移动门架式结构,手臂承载机构可沿着导轨进行移动,导轨安装与立柱上,位于被看管设备上方。
1、手臂承载机构沿导轨移动,由安装于承载机构上的双作用气缸驱动装置,保证操作机手臂实现600mm的往复运动。
2、手臂在肩关节中的转动,由安装于承载机构上的双作用气缸驱动装置,运动传递机构和安装于肩部的滚珠丝杠实现。
3、手臂在肘关节中的转动,由安装于小臂上的双作用气缸驱动装置,运动传递机构实现。
二、搬运机器人的总体设计的思路
设计机器人大体上可分为两个阶段:
1、系统分析阶段
①根据系统的目标,明确所采用机器人的目的和任务。
②分析机器人所在系统的工作环境。
③根据机器人的工作要求,确定机器人的基本功能和方案。如机器人的自由度、信息的存储量、计算机功能、动作精度的要求、所能抓取的重量、容许的运动范围、以及对温度、震动等环境的适应性。
2、技术设计阶段
①根据系统的要求确定机器人的自由度和允许的空间工作范围,选择机器人的坐标形式。
②拟订机器人的运动路线和空间作业图。
③确定驱动系统的类型。
④选择各部件的具体结构,进行机器人总装图的设计。
⑤绘制机器人的零件图,并确定尺寸。
三、搬运机器人的结构组成
搬运机器人由执行机构、驱动机构和控制机构三部分组成。
1、执行机构
(1)手部
手部既直接与工件接触的部分,一般是回转型或平动型(多为回转型,因其结构简单)。手部多为两指(也有多指);根据需要分为外抓式和内抓式两种;也可以用负压式或真空式的空气吸盘(主要用于可吸附的,光滑表面的零件或薄板零件)和电磁吸盘。
传力机构形式较多,常用的有:滑槽杠杆式、连杆杠杆式、斜楔杠杆式、齿轮齿条式、丝杠螺母式、弹簧式和重力式。本次设计的手部选择夹持类回转型结构手部。
手部执行依靠杆的伸缩运动来实现其张合运动,杆的动力源来自后续驱动源的液压缸,该液压缸采用的是伸缩式液压缸,该液压缸能够节省横向的工作空间。
(2)腕部
腕部是连接手部和臂部的部件,并可用来调节被抓物体的方位,以扩大机械手的动作范围,并使机械手变的更灵巧,适应性更强。手腕有独立的自由度。有回转运动、上下摆动、左右摆动。一般腕部设有回转运动再增加一个上下摆动即可满足工作要求,有些动作较为简单的专用机械手,为了简化结构,可以不设腕部,而直接用臂部运动驱动手部搬运工件。
目前,应用最为广泛的手腕回转运动机构为回转液压(气)缸,它的结构紧凑,灵巧但回转角度小(一般小于270°),并且要求严格密封,否则就难保证稳定的输出扭矩。因此在要求较大回转角的情况下,采用齿条传动或链轮以及轮系结构。本次设计的搬运机器人的腕部是实现手部180°的旋转运动。
腕部的驱动方式采用直接驱动的方式,由于腕部装在手臂的末端,所以必须设计的十分紧凑可以把驱动源装在手腕上。机器人手部的张合是由双作用单柱塞液压缸驱动的;而手腕的回转运动则由回转液压缸实现。将夹紧活塞缸的外壳与摆动油缸的动片连接在一起;当回转液压缸中不同的油腔中进油时即可实现手腕不同方向的回转。
(3)臂部
手臂部件是机械手的重要握持部件。它的作用是支撑腕部和手部(包括工作或夹具),并带动他们做空间运动。
臂部运动的目的:把手部送到空间运动范围内任意一点。如果改变手部的姿态(方位),则用腕部的自由度加以实现。因此,一般来说臂部具有三个自由度才能满足基本要求,即手臂的伸缩、左右旋转、升降(或俯仰)运动。
手臂的各种运动通常用驱动机构(如液压缸或者气缸)和各种传动机构来实现,从臂部的受力情况分析,它在工作中既受腕部、手部和工件的静、动载荷,而且自身运动较为多,受力复杂。因此,它的结构、工作范围、灵活性以及抓重大小和定位精度直接影响机械手的工作性能。本次设计实现臂部的上下移动、前后伸缩、以及臂部的回转运动。手臂的运动参数:伸缩行程:1200mm;伸缩速度:83mm/s;升降行程:300mm;升降速度:67mm/s;回转范围:180~0。机器人手臂的伸缩使其手臂的工作长度发生变化,在圆柱坐标式结构中,手臂的最大工作长度决定其末端所能达到的圆柱表面直径。伸缩式臂部机构的驱动可采用液压缸直接驱动。
(4)机座
机座是机身机器人的基础部分,起支撑作用。对固定式机器人,直接联接在地面上,对可移动式机器人,则安装在移动结构上。机身由臂部运动(升降、平移、回转和俯仰)机构及其相关的导向装置、支撑件等组成。并且,臂部的升降、回转或俯仰等运动的驱动装置或传动件都安装在机身上。臂部的运动越多,机身的结构和受力越复杂。本次毕业设计的搬运机器人的机身选用升降回转型机身结构;臂部和机身的配置型式采用立柱式单臂配置,其驱动源来自回转液压缸。
2、驱动机构
驱动机构是搬运机器人的重要组成部分。根据动力源的不同,工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。
(1)液压传动。具有较大功率体积比,常用于大负载的场合;压力、流量均容易控制,可无级调速;反应灵敏,可实现连续轨迹控制,维修方便;但液体对温度变化敏感,油液泄漏易着火;中小型专用机械手或机器人都有应用,重型机械手多为液压驱动;液压元件成本较高,油路也比较复杂。
(2)气压传动。气动系统简单,成本低,适合于节拍快、负载小且精度要求不高的场合,常用于点位控制、抓取、弹性握持和真空吸附,可高速,但冲击较严重,精确定位困难;维修简单,能在高温、粉尘等恶劣环境中使用,泄漏无影响;中小型专用机械手或机器人都有应用。
(3)电动。有异步电机、直流电机、步进或伺服电机等电动驱动方式。电动机使用简单,且随着材料性能的提高,电动机性能也逐渐提高,目前主要适合于中等负载,特别是适合动作复杂、运动轨迹严格的工业机器人和各种微型机器人。
(4)制动器:制动器是将机械运动部分的能量变为热能释放,从而使运动的机械速度降低或者停止的装置,它大致可分为机械制动器和电气制动起两类。在机器人机构中,学要使用制动器的情况如下:
①特殊情况下的瞬间停止和需要采取安全措施
②停电时,防止运动部分下滑而破坏其他装置。
机械制动器:
机械制动器有螺旋式自动加载制动器、盘式制动器、闸瓦式制动器和电磁制动器等几种。其中最典型的是电磁制动器。
在机器人的驱动系统中常使用伺服电动机,伺服电机本身的特性决定了电磁制动器是不可缺少的部件。从原理上讲,这种制动器就是用弹簧力制动的盘式制动器,只有励磁电流通过线圈时制动器打开,这时制动器不起制动作用,而当电源断开线圈中无励磁电流时,在弹簧力的作用下处于制动状态的常闭方式。因此这种制动器被称为无励磁动作型电磁制动器。又因为这种制动器常用于安全制动场合,所以也称为安全制动器。
电气制动器
电动机是将电能转换为机械能的装置,反之,他也具有将旋转机械能转换为电能的发电功能。换言之,伺服电机是一种能量转换装置,可将电能转换为机械能,同时也能通过其反过程来达到制动的目的。但对于直流电机、同步电机和感应电机等各种不同类型的电机,必须分别采用适当的制动电路。
3、控制机构
构建机器人平台的核心是建立机器人的控制系统。首先需要选择和硬件平台,控制系统硬件平台对于系统的开放性、实现方式和开发工作量有很大的影响。一般常用的控制系统硬件平台应满足:硬件系统基于标准总线机构,具有可伸缩性;硬件结构具有必要的实时计算能力;硬件系统模块化,便于添加或更改各种接口、传感器和特殊计算机等;低成本。到目前为止,一般机器人控制系统的硬件平台可以大致分为两类:基于VME总线(Versamodel Eurocard由Motorola公司1981年推出的第一代32位工业开放标准总线)的系统和基于PC总线的系统。近年来,随着PC机性能的快速发展,可靠性大为提高,价格却大幅度降低,以PC机为核心的控制系统已广泛被机器人控制领域所接受。
-
机器人
+关注
关注
214文章
31691浏览量
224633 -
设备
+关注
关注
2文章
4901浏览量
73946 -
工业
+关注
关注
3文章
2471浏览量
49428
发布评论请先 登录
行业独创!寻迹智行线缆线盘搬运机器人,开启线缆搬运智能化新纪元

晶圆搬运机器人搭配Aligner寻边器,能提升定位传输效率吗?
上银晶圆搬运机器人的重复定位精度能否满足半导体高精度传输要求?
智能复合机器人解决方案:优化自动化搬运与提高物流效率
解锁“试管自动抓取搬运”新纪元:富唯智能复合机器人重塑精准物流

【案例分享】电子谷多芯线束赋能高效产线!AGV 搬运机器人稳定连接方案

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
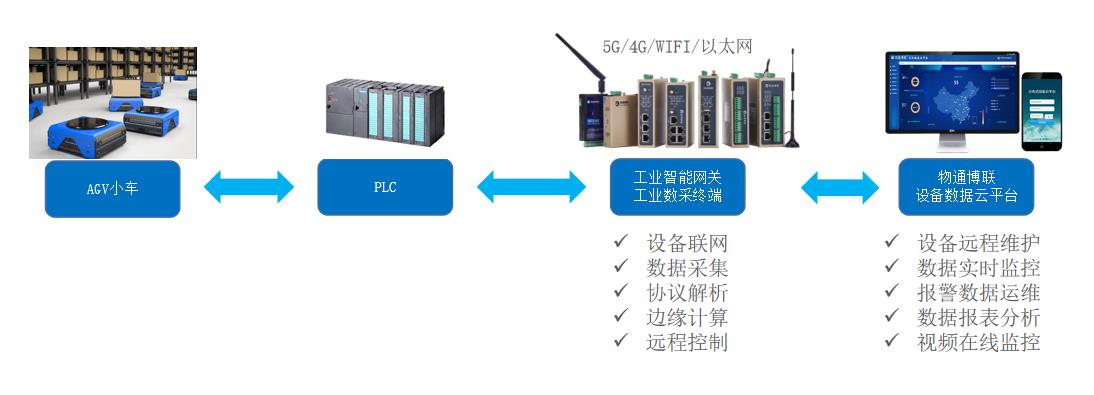
AGV搬运机器人联网监控系统方案
复合机器人开启血浆包“零接触”搬运新时代

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
图达通灵雀W赋能中力智能搬运机器人,共筑智能物流新标杆
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升



评论