 机器人学专业学生利用 NVIDIA Jetson 开发出自主轮椅
机器人学专业学生利用 NVIDIA Jetson 开发出自主轮椅

通过使用边缘 AI 技术,机器人开发者、卡伦亚理工学院本科生 Kabilan KB 致力于提升残障人士出行质量。
有了人工智能的帮助,机器人、拖拉机及婴儿推车(甚至是滑板运动场地),都在实现自主化发展。一位名叫 Kabilan KB 的开发者正在将自主导航功能应用于轮椅,帮助残障人士收获更高质量的出行体验。
这位印度卡伦亚理工学院的本科生正在使用 NVIDIA Jetson 边缘 AI 和机器人技术平台推进他的自主轮椅项目。
这款自主电动轮椅配备深度传感器和激光雷达传感器,并且与 USB 摄像头进行了连接,其不仅能够感知周围环境,还可以规划出一条通往用户指定目的地的无障碍路径。
KB 表示:“这款电动轮椅的使用者只需要提供他们要前往的地点,自主导航系统就会对这些位置进行编程,然后使用指定的数值表示系统规划的路径,比如‘1’键对应厨房,‘2’键对应卧室,使用者只要按下相应的按键,自动轮椅就会把他们带到指定的地方。”
NVIDIA Jetson Nano 开发者套件可以实时处理来自摄像头和传感器的数据,然后使用基于深度学习的计算机视觉模型来识别环境中的障碍物。
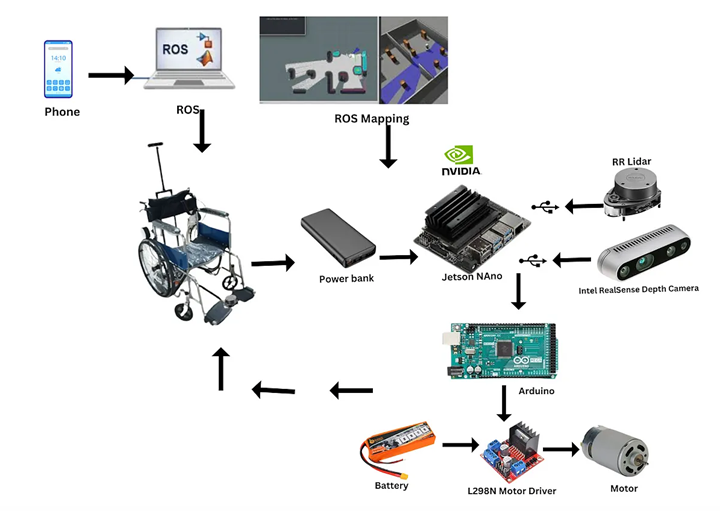
这款开发者套件作为电动轮椅自主系统的“大脑”,可以生成周围环境的 2D 地图,以便规划一条通往目的地的无碰撞路径,同时也会向电动轮椅发送更新信号,以确保轮椅的行驶安全。
创客介绍
拥有机械工程背景的 KB 在最近几年迷上了 AI 和机器人技术,于是他利用空闲时间在视频网站上搜索相关课程视频。
现在,他正在卡伦亚理工学院攻读机器人与自动化专业学士学位,并立志有朝一日创办一家机器人公司。
KB 自诩为自我教育的支持者,他已经获得了 NVIDIA 深度学习培训中心的多项认证,包括“在 Jetson Nano 上构建边缘视频 AI 应用”和“在 Omniverse 中使用扩展程序进行开发、自定义和发布”。
在掌握了机器人技术的基础知识后,KB 开始在 NVIDIA Omniverse 中进行仿真实验,这是一款基于 OpenUSD 框架的 3D 工具操作平台。
他提到:“使用 Omniverse 进行仿真不需要斥巨资制作机器人原型模型,因为可以生成合成数据进行代替。这真是一款面向未来的软件。”
灵感来源
KB 希望通过这个最新的 NVIDIA Jetson 项目创造出一种设备,去帮助他患有行动障碍的亲戚,以及其他可能无法控制手动或电动轮椅的残障人士。
KB 表示:“有时人们是负担不起全电动轮椅的。在印度,只有一部分人才买得起这种轮椅,所以我决心使用市面上最基础的电动轮椅,通过将其连接到 Jetson 进行自主运行。”
KB 的个人项目已经得到了波士顿儿童医院与哈佛大学医学院全球外科和社会变革项目(Program in Global Surgery and Social Change)的赞助。
KB 的 Jetson 项目
购买了基础款的电动轮椅之后,KB 将轮椅的电机枢纽与 NVIDIA Jetson Nano、激光雷达和深度摄像头进行了连接。
他使用 Jetson Nano 上的 YOLO 物体检测功能以及 Robot Operating System(ROS,用于构建机器人应用的主流软件),训练自主轮椅的 AI 算法。
这些算法支持自主电动轮椅感知及绘制其所处的环境,并规划出一条无碰撞的路径。
“NVIDIA Jetson Nano 的实时处理速度可避免延迟或滞后,不影响用户使用”,KB 提到,他从 6 月起就一直在开发该项目的原型。这位开发者在自己的博客上对这款自主轮椅的技术组件进行了详细介绍,也在卡伦亚创新与设计工作室的视频账号上传了演示视频。
展望未来,KB 希望自己的项目可以进一步扩展,允许用户使用与机器学习算法相连的脑电图(EEG)中的大脑信号来控制轮椅。
KB 表示:“我想要创造出一种产品,能让患有完全行动障碍的人士只需要想到要前往的目的地,就能控制轮椅顺利抵达。”
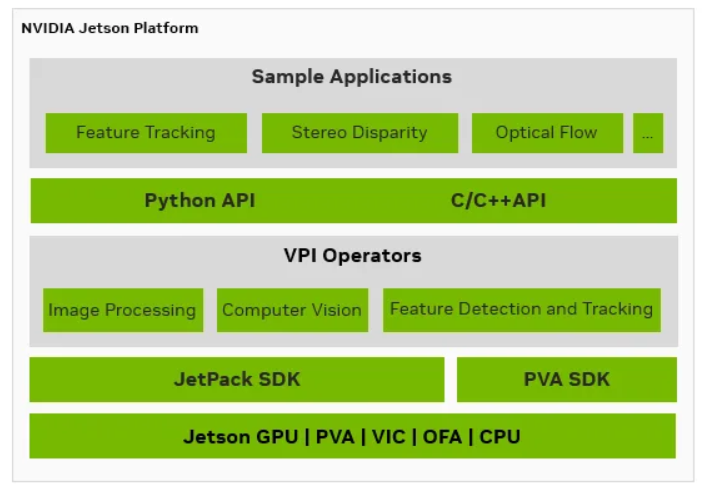
了解更多关于 NVIDIA Jetson 平台的信息:
https://www.nvidia.cn/autonomous-machines/embedded-systems/
GTC 2024 将于 2024 年 3 月 18 至 21 日在美国加州圣何塞会议中心举行,线上大会也将同期开放。点击“阅读原文”或扫描下方海报二维码,关注更多会议及活动信息。
原文标题:机器人学专业学生利用 NVIDIA Jetson 开发出自主轮椅
文章出处:【微信公众号:NVIDIA英伟达】欢迎添加关注!文章转载请注明出处。
-
英伟达
+关注
关注
23文章
4126浏览量
99776
原文标题:机器人学专业学生利用 NVIDIA Jetson 开发出自主轮椅
文章出处:【微信号:NVIDIA_China,微信公众号:NVIDIA英伟达】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
如何在NVIDIA Jetson平台上运行最新的开源AI模型

如何在NVIDIA Jetson Thor上提升机器人感知效率
NVIDIA Jetson系列开发者套件助力打造面向未来的智能机器人
NVIDIA开源物理引擎与OpenUSD加速机器人学习
NVIDIA 发布三大利器,推动人形机器人迈向新纪元
NVIDIA Isaac Lab多GPU多节点训练指南

ADI借助NVIDIA Jetson Thor平台加速人形机器人研发进程
NVIDIA三台计算机解决方案如何协同助力机器人技术
基于 NVIDIA Blackwell 的 Jetson Thor 现已发售,加速通用机器人时代的到来
NVIDIA Jetson + Isaac SDK 人形机器人方案全面解析
NVIDIA Jetson + Isaac SDK 在人形机器人领域的方案详解
NVIDIA展示机器人领域的研究成果
通过NVIDIA Cosmos模型增强机器人学习




评论