 基于CW32的MPU6050姿态传感器的应用
基于CW32的MPU6050姿态传感器的应用

一、简介
1.MPU6050是一种常用的六轴姿态传感器模块,结合了三轴陀螺仪和三轴加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。MPU6050 对陀螺仪和加速度计分别用了三个16 位的ADC(0~65535),将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。并有可编程的低通滤波器。MPU6050模块的应用场景非常广泛,包括但不限于以下几个领域:
(1)姿态感知与控制:通过读取陀螺仪和加速度计的数据,可以实时获取物体的姿态信息,如倾斜角度、旋转角度等。这在飞行器、机器人、无人车等项目中非常常见,用于实现姿态感知和控制。
(2)运动跟踪与手势识别:MPU6050可以用于捕捉人体运动轨迹,如手部的姿态和手势,从而实现运动跟踪、手势识别、虚拟现实交互等应用。
(3)震动检测与防抖:结合加速度计,MPU6050可以检测到物体的震动和冲击,用于防抖技术、硬盘保护、运动检测等。
(4)步态分析与健康监测:MPU6050可以用于分析人体的步态特征和动作,用于健康监测、运动分析、姿势校正等。
二、所需物料+寄存器说明
.本实验使用到了CW32F030C8小蓝板、GY-521模块、0.96寸OLED显示屏Keil5开发环境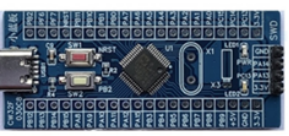
CW32F030C8小蓝板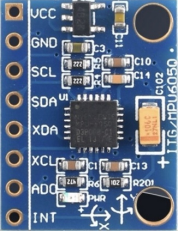
GY-521模块
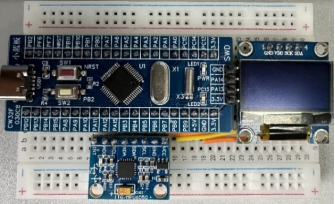
实物展示
【GY-521模块与单片机连线】:VCC<-->+3.3V
GND<-->GND
SCL<-->PB5
SDA<-->PB4
【OLED显示屏与单片机连线】:VCC<-->+3.3V
GND<-->GND
SCL<-->PA1
SDA<-->PA2
注:SCL和 SDA是连接MCU的 IIC接口,MCU通过这个IIC 接口来控制MPU6050,另外还有一个 IIC 接口: XCL和XDA ,这个接口可用来连外部从设备比如磁力计,这样就可以组成一个九轴传感器。AD0是MPU6050的地址控制引脚,该引脚控制的是IIC 地址的最低位。MPU6050的默认IIC地址是:0X68,如果AD0接VDD,则是0X69。需要注意的是:这里的地址0x68(110 1000)和0x69(110 1001)是不包含最低位的7位数据,通常最低位用于表示IIC主机的读取数据/写数据模式。如默认情况下对MPU6050进行写操作,则发送地址0xD0(1101 0000),读操作则发送地址0xD1(1101 0001)。
寄存器说明:

该寄存器是配置陀螺仪输出速率的分频器,用于为MPU-6050生成采样速率。这里有个公式:采样频率=陀螺仪输出频率/(1+采样分频数)。当 DLPF(数字低通滤波器,见寄存器Configuration)禁用时,陀螺仪输出频率为8kHz;当 DLPF 使能,陀螺仪输出频率=1KHz。

该寄存器为陀螺仪和加速度计配置外部帧同步(FSYNC) 管脚的采样和数字低通滤波(DLPF)设置。其中,数字低通滤波器DLPF由DLPF_CFG配置。根据下表所示的DLPF_CFG值对加速度计和陀螺仪进行滤波。
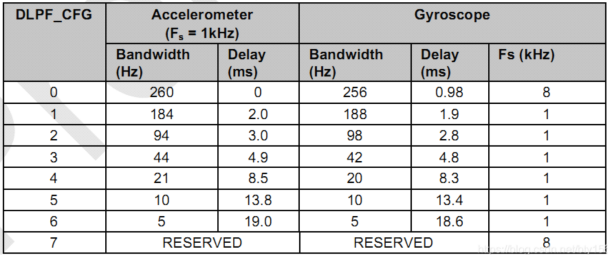
FS为陀螺仪输出频率。SMPLRT_DIV由预设定的采样频率根据上述的公式计算得出。一般情况下,DPLF滤波频率为采样频率的一半,如设定采样频率为50Hz,由表可知当FS为1kHz,SMPLRT_DIV的值为1000/50-1=19。
该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。其中,XG_ST、YG_ST、ZG_ST分别用来设置陀螺仪X轴、Y轴、Z轴自检,置0则不触发自检。FS_SEL[1:0]用于设置陀螺仪的满量程,如下表:
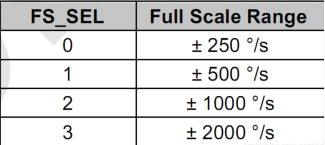
我们一般设置为3,即满量程为±2000°/s

该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。同时这个寄存器也可以用于配置数字高通滤波器(DHPF)。其中,XA_ST、YA_ST、ZA_ST分别用来设置加速度计X轴、Y轴、Z轴自检,置0则不触发自检。AFS_SEL[1:0]用于选择加速度计的满量程范围,如下表:
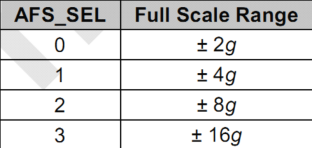
我们一般设置为0,即满量程为±2g
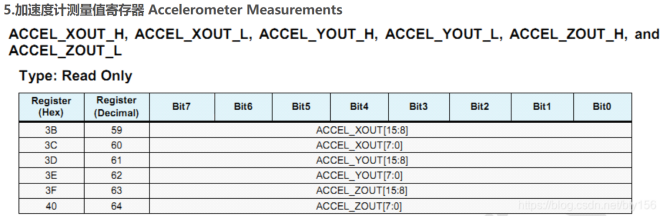
ACCEL_XOUT : 由 2部分组成的 16位数值存储最近X 轴加速度计的测量值。 ACCEL_YOUT : 由 2部分组成的 16位数值存储最近Y 轴加速度计的测量值。 ACCEL_ZOUT : 由 2部分组成的 16位数值存储最近Z 轴加速度计的测量值。
以ACCEL_XOUT为例,若倍率设定为2g,则意味着ACC_X取最小值-32768时,当前加速度为沿X轴正方向2倍的重力加速度;若设定为4g,取-32768时表示沿X轴正方向4倍的重力加速度,以此类推。显然,倍率越低精度越好,倍率越高表示的范围越大,这要根据具体的应用来设定。以ACC_X为例,若当前设定的加速度倍率为4g,那么将ACC_X读数换算为加速度的公式为:

g可取当地重力加速度。
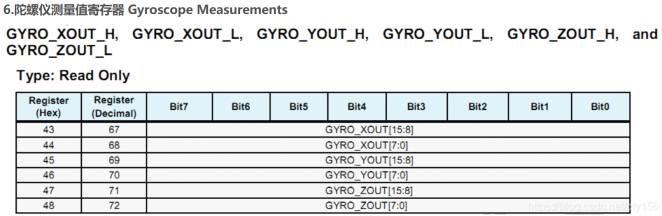
该寄存器存储最近加陀螺仪的测量值,构成与加速度计测量值寄存器相同,不做赘述。
以GYR_X为例,若倍率设定为250度/秒,则意味着GYR取正最大值32768时,当前角速度为顺时针250度/秒;若设定为500度/秒,取32768时表示当前角速度为顺时针500度/秒。显然,倍率越低精度越好,倍率越高表示的范围越大。以GYR_X为例,若当前设定的角速度倍率为1000度/秒,那么将GRY_X读数换算为角速度(顺时针)的公式为:


该寄存器允许用户配置电源模式和时钟源,还提供了复位整个设备和禁用温度传感器的位。当置SLEEP位为1时,MPU-60X0 可以进入低功耗睡眠模式。该寄存器的最低三位用于设置系统的时钟源选择,默认值是0(内部8M RC振荡),不过一般设置为1,即选择x轴陀螺仪PLL作为时钟源,以获得更高精度的时钟。DEVICE_RESET该位置 1,重启内部寄存器到默认值。复位完成后该位自动清0。TEMP_DIS该位置 1,禁用温度传感器。
三、核心代码
main.c:
#include "main.h"
#include "OLED.h"
#include "GY_521.h"
#include "MYI2C.h"
#include "Delay.h"
typedef struct{
int16_t AX;
int16_t AY;
int16_t AZ;
}MPU6050_Adata; //MPU6050加速度计三轴数据
typedef struct{
int16_t GX;
int16_t GY;
int16_t GZ;
}MPU6050_Gdata; //MPU6050陀螺仪三轴数据
MPU6050_Adata Adata; //结构体变量
MPU6050_Gdata Gdata;
void GY_521_Init(void) //GY-521初始化
{
GY521_GPIO_Init(); //GPIO初始化
//解除睡眠,失能温度传感器,选择X轴的陀螺仪时钟
WriteData(GY521_ADDR, MPU6050_PWR_MGMT_1, 0x09);
WriteData(GY521_ADDR, MPU6050_CONFIG, 0x06); //低通滤波
WriteData(GY521_ADDR, MPU6050_SMPRT_DIV, 0x09); //1KHz十分频为100Hz
WriteData(GY521_ADDR, MPU6050_GYRO_CONFIG, 0x18);//陀螺仪最大量程
WriteData(GY521_ADDR, MPU6050_ACCEL_CONFIG, 0x18);//加速度计最大量程
}
void MPU6050_GetData() //获取MPU6050六轴数据
{
uint8_t MPU6050_Raw_Data[14]={0};
//以MPU6050_ACCEL_XOUT_H为起始地址,连续读取14字节的数据
ReadData(GY521_ADDR,MPU6050_ACCEL_XOUT_H,MPU6050_Raw_Data,14);
//数据处理
Adata.AX=(MPU6050_Raw_Data[0]< < 8)|MPU6050_Raw_Data[1];
Adata.AY=(MPU6050_Raw_Data[2]< < 8)|MPU6050_Raw_Data[3];
Adata.AZ=(MPU6050_Raw_Data[4]< < 8)|MPU6050_Raw_Data[5];
Gdata.GX=(MPU6050_Raw_Data[8]< < 8)|MPU6050_Raw_Data[9];
Gdata.GY=(MPU6050_Raw_Data[10]< < 8)|MPU6050_Raw_Data[11];
Gdata.GZ=(MPU6050_Raw_Data[12]< < 8)|MPU6050_Raw_Data[13];
}
int main()
{
OLED_Init(); //OLED初始化
GY_521_Init(); //GY-521初始化
OLED_ShowString(1,1,"A: G:");//提示:左列显示加速度计数据;右列显示陀螺仪数据
while(1)
{
MPU6050_GetData(); //获取六轴数据
OLED_ShowSignedNum(2,1,Adata.AX,5);
OLED_ShowSignedNum(3,1,Adata.AY,5);
OLED_ShowSignedNum(4,1,Adata.AZ,5);
OLED_ShowSignedNum(2,9,Gdata.GX,5);
OLED_ShowSignedNum(3,9,Gdata.GY,5);
OLED_ShowSignedNum(4,9,Gdata.GZ,5);
Delay_ms(100); //延时刷新
}
}
四、效果演示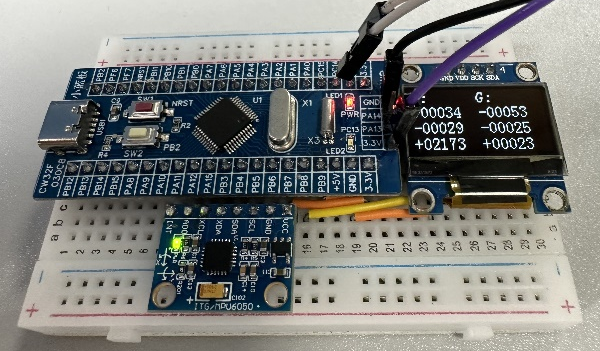
平放
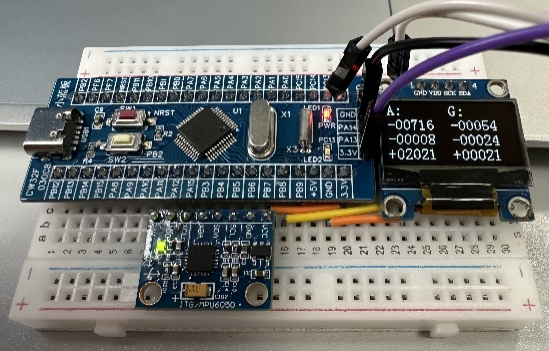
向下倾斜
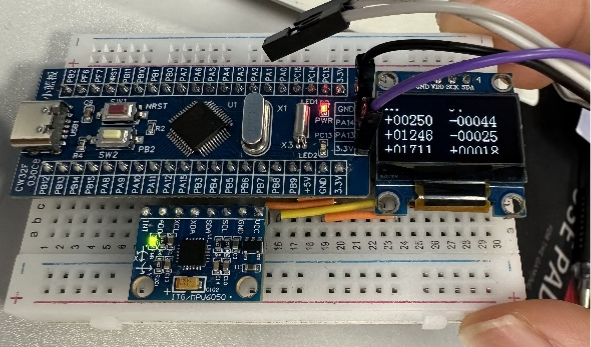
左倾斜向
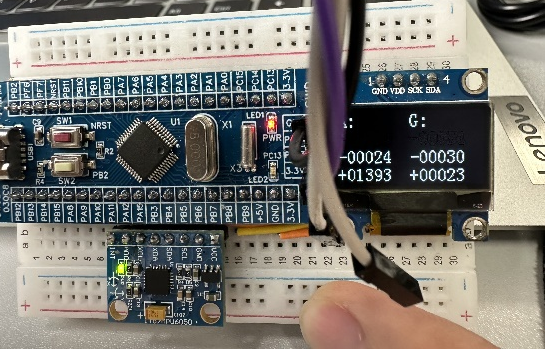
直立
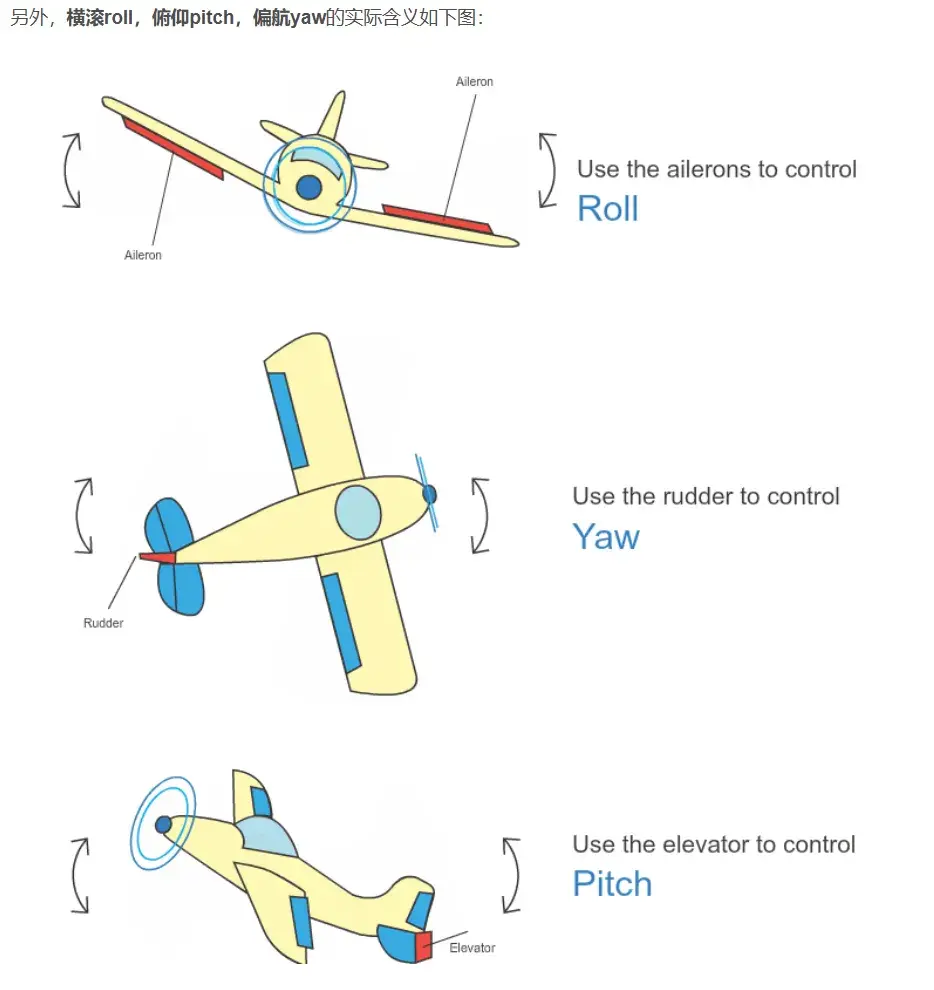
读到的原始数据还不能直接使用,要转化成四元数,欧拉角后,获得器件的姿态角才有用,而 MPU6050 自带了数字运动处理器,即 DMP,并且,InvenSense 提供了一个 MPU6050 的嵌入式运动驱动库,结合 MPU6050 的 DMP,可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到yaw、roll和pitch。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55567浏览量
794241 -
CW32
+关注
关注
1文章
326浏览量
1968
发布评论请先 登录
CW32L012读取MPU6050姿态数据

CW32温度传感器的应用
CW32单片机如何让生活更便捷
CW32单片机在智能马桶的应用
CW32 MCU温度监测应用
基于芯源CW32 MCU智能家居照明控制系统设计与实现
CW32 MCU用什么IDE开发?
CW32 MCU有哪些系列?
CW32 MCU用什么仿真器开发?
CW32电机控制基础--无刷电机无位置传感器的转子位置检测技术
小安派BW21-CBV-Kit入门教程之DMP6读取MPU6050数据



评论