 多轴伺服,一芯搞定
多轴伺服,一芯搞定

随着近年来工业机器人、电子制造设备等产业的快速扩张,伺服系统在新兴产业中应用也越来越广。未来几年伺服市场(包括交流伺服、直流伺服、编码器、CNC控制器等产品)将实现30~40%左右的增速,预计2025年我国伺服系统市场规模将达到190亿元,同比增长12.4%。
在市场规模持续扩大的同时,伺服系统本身也呈现出新的特点:
高精度、高性能:采用更高精度的编码器,具有更高的采样精度和数据位数;
小型化:体积和重量不断变小,从而使机械设备的安装和使用更加便捷;
集成化:伺服系统本身集成度更高,如集成各种编码器的接口、Ether CAT通讯等;此外还有多轴集成的趋势,如单芯片实现2轴、3轴等多轴伺服控制。
要实现更高性能、更高集成度的伺服系统设计,主控MCU的选择非常关键。在伺服系统主控MCU处理器内核的选择上,除传统的Arm外,现在还有RISC-V。得益于RISC-V本身的简洁性和模块化设计,CPU能运行在更高的频率,带来更高的性能。因此,基于RISC-V的MCU能让伺服系统实现更高性能及更高的集成度。
MCU的性能是从两个维度来衡量的:一个是CPU的性能,一个是外设的性能。CPU主频类似于速度,对于同一种架构的MCU,主频越高,MCU的速度就越快。处理器内核架构是影响处理器性能的关键因素,先进的架构具有更强大的指令集和更优秀的运算单元,因而拥有更为强大的算力。一般来说,越先进的内核架构,在单位时间内可以执行的指令数和处理数据的数量就越多。MCU的与伺服电机控制相关的外设包括用来采样电压和电流的模/数转换器(ADC)、能产生PWM信号的脉冲宽度调制器(PWM)等,这些外设的性能也决定了MCU的性能。
HPM6750就是上海先楫半导体公司开发的采用RISC-V 内核、具有高主频及创新总线架构的高性能MCU。HPM6750的CPU主频高达816MHz,模拟外设包括4组共32路精度达2.5ns的PWM、3个12位高速ADC以及1个16位高精度ADC,其性能在市场同类产品中居于领先水平。同时,上海先楫半导体公司还提供基于高性能MCU的各种解决方案,如伺服驱动、PLC、工业网关等,是工业4.0整体解决方案提供者!
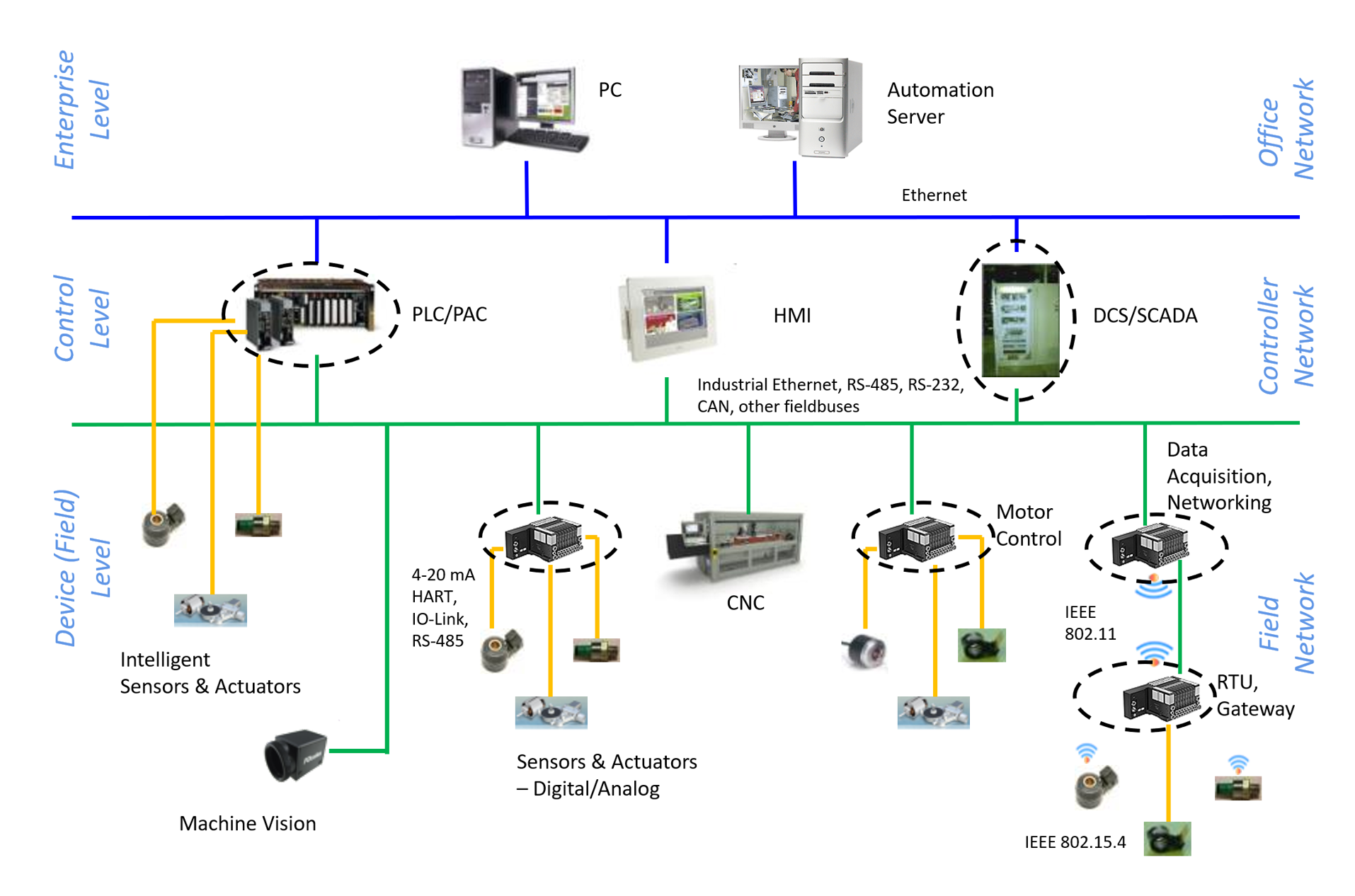
▲HPM为工业4.0提供全面的解决方案
解决方案分享:先楫高性能MCU在多轴伺服控制的应用
案例一:三轴伺服运动控制,1分钟绘制世界地图
先楫的生态合作伙伴采用先楫半导体超高性能HPM6750开发的三轴伺服数控机床解决方案,以HPM6750作为主控,单芯片实现了三轴伺服电机的运动控制,可以1分钟绘制世界地图并延伸至各种三轴伺服结构应用。
在三轴伺服方案中,X轴、Y轴、Z轴协同工作,在伺服控制中接入插补算法,完成世界地图绘制。下面的视频演示了在三轴伺服运动控制下绘制世界地图的过程,不到1分钟就可绘制一个基本的世界地图。
三轴伺服方案适用于诸多场景,如枕式包装机、三轴机械手系统等应用。
案例二:单芯片四轴伺服运动控制,更稳、更快、更准
在当前的工业应用中,多轴伺服运动控制系统对响应时间、响应速度和稳定性等指标要求越来越高。传统的四轴伺服运动控制系统多采用模块化方式集成,以及HMI+Ether CAT/NVUC等控制器+伺服驱动器(由多个组成)的拓扑结构,所挂载的伺服驱动器越多,数据传输和处理就越复杂,从而使控制精度、实时性和同步性能受到限制。
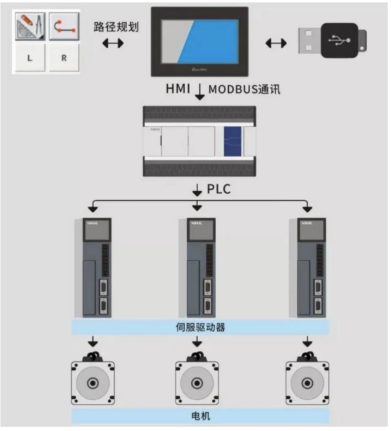
▲市面工业应用多轴伺服运动控制系统
先楫合作伙伴采用先楫半导体超高性能HPM6750开发的四轴伺服解决方案以HPM6750作为主控,单芯片实现了HMI与四轴伺服电机的运动控制,稳定性好、响应速度快、控制精度高。
四轴伺服电机运动无需总线通信反馈与交互控制,片内完成所有数据的采集、处理和显示,对伺服控制和四电机的同步控制效率大大提高。下面的视频演示了通过UI交互的四轴伺服电机运动。
高性能驱动:HPM6750芯片介绍
HPM6750采用双RISC-V内核,主频达816MHz,凭借先楫半导体的创新总线架构、高效的L1缓存和本地存储器,创下了高达 9220CoreMark和高达 4651 DMIPS 的 MCU性能新纪录。
除了高算力RISC-V CPU,HPM6700系列产品还创造性地整合了一系列高性能外设,包括支持2D图形加速的显示系统、高速USB、千兆以太网、CAN FD等通讯接口,高速12位和高精度16位模数转换器,面向高性能电机控制和数字电源的运动控制系统。
与ARM Cortex-M家族中性能领先的M7相比,HPM6750的 Coremark/MHz 跑分高出约10%。
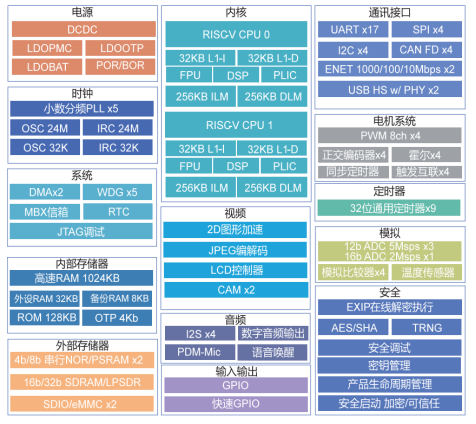
▲HPM6750系统框图
欲了解更多HPM6750产品特点,请点击“阅读原文”即可获取!
(*本文部分行业数据来自网络行业报告,敬请留意。)
以上为本期分享内容,感谢立功科技·求远电子提供与先楫联合开发的应用解决方案。期待后续有更多的干货内容可以分享给大家,欢迎关注并推荐“先楫半导体HPMicro”及“先楫芯上人”。
直接转载来源:先楫半导体HPMicro
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
mcu
+关注
关注
147文章
19263浏览量
405325 -
编码器
+关注
关注
45文章
4028浏览量
143815 -
cpu
+关注
关注
68文章
11381浏览量
226558 -
PWM
+关注
关注
116文章
5912浏览量
227310 -
工业4.0
+关注
关注
49文章
2079浏览量
125498
发布评论请先 登录
直线模组多轴组合使用的四大核心优势详解

IRMCS201:单轴伺服驱动设计平台的卓越之选
一颗芯片如何同时搞定PMSM、步进和直流电机?TMC4671这颗伺服芯片里藏了什么?

一块开发板搞定步进、伺服、直流三种电机?TMC9660-STP三合一驱动方案!
固德晟基于瑞萨新一代RA8T2 MCU的EtherCAT双轴伺服控制方案介绍

有奖直播 | 瑞萨RA8T2 EtherCAT双轴伺服控制方案

单轴/多轴 Trinamic 电机驱动模块怎么选?
六轴驱动,如何一步到位?TMCM-6214 的多轴控制!
飞创多轴直线电机模组在工业自动化中的优势与应用

深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
伺服精准控制优选!电子谷伺服连接线适配多品牌稳定传输

基于SoC/FPGA的云台多轴协同驱动解决方案
一个FOR循环完成多个伺服轴的实例化方法

解锁多轴直线电机模组的高效搭接方法




评论