 机器人如何用来进行STEP跳步变量
机器人如何用来进行STEP跳步变量

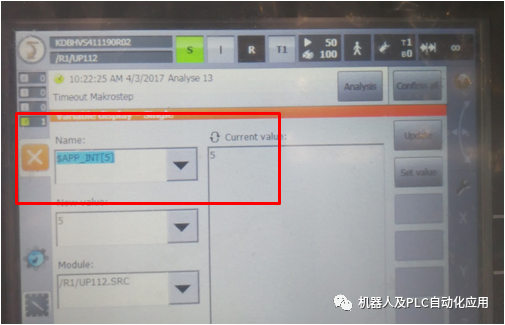
APP_INT[5]
使用来进行STEP跳步的变量
MakroSchrittkette
INT Function
IF Function==1THEN
$APP_INT[5]=1
Return
ENDIF
SWITCH$APP_INT[5] -通过变量$APP_INT[5]来进行对STEP的跳步功能。
Case 1
Schritt 3 = F64 & !F65 & !F66 & !F67 & F90& !F91 & !F565 & A4039 -去第3步的条件-
IF$FLAG[64] AND NOT $FLAG[65] AND NOT $FLAG[66] AND NOT $FLAG[67] AND $FLAG[90]AND NOT $FLAG[91] AND NOT $FLAG[565] AND $OUT[4039] THEN
PREVSTEP = $APP_INT[5] -用来显示反馈提示上一步在第几步-
$APP_INT[5] = 3 -去第3步-
ENDIF
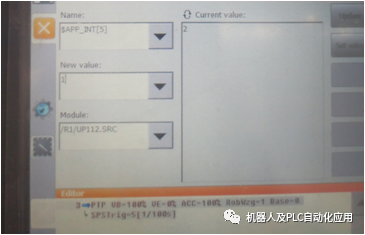
顺序快的跳步:
将$APP_INT[5]的值由 当前停止的值改为1,STEP会先返回到第1步再去第2步。不需要专家盘,也不用退出程序关闭SPS。
$APP_INT[6]= 1-用来激活备份程序-
IF ($IN[I_DS_Anf_SPS] AND NOT B_DS_Hilf) THEN -E31机器人程序备份开始
$APP_INT[6]=1 ---当其是1时证明开始备份程序-
B_DS_aktiv=TRUE
ENDIF
B_DS_Hilf = $IN[I_DS_Anf_SPS]-中间过度变量-
IF NOT $IN[I_DS_Anf_SPS] AND $OUT[O_DS_FM_SPS] THEN 当没有E31 而有A31后
$OUT[O_DS_FM_SPS]=false-载关闭A31
ENDIF
IF ((B_DS_aktiv==TRUE) AND ($APP_INT[6]==0))THEN -$APP_INT[6]=0说明备份结束-
IF(ARCHIVE_RES==0) THEN -ARCHIVE_RES默认是0-“程序允许自动备份功能”
$OUT[O_DS_FM_SPS]=TRUE -备份结束发出A31-
B_DS_aktiv=false
ENDIF
IF(ARCHIVE_RES<0) THEN -提示:程序不允许自动备份功能
SyncMoveMessage(70,#NotifyMsg, ARCHIVE_RES)
B_DS_aktiv=false
ENDIF
审核编辑:彭菁
-
机器人
+关注
关注
213文章
31432浏览量
223611 -
step
+关注
关注
0文章
45浏览量
21265 -
变量
+关注
关注
0文章
616浏览量
29566
原文标题:机器人$APP_INT的使用详解
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
SPCE061A语音识别机器人应用方案
美军研发能跳《江南Style》的新型机器人
什么是工业机器人
DIY一个打招呼的乌龟机器人
循线音乐百灵鸟机器人--鸥鹏机器人制作
【KittenBot机器人试用申请】搬运机器人
机器人、协作机器人和移动机器人,你分的清楚吗
机器人与编程的区别
机器人是什么?
读取机器人程序中的变量




评论