 服务机器人领域所需的各类零部件-②机器人关联零件、装置等:顺畅、精准的关节驱动
服务机器人领域所需的各类零部件-②机器人关联零件、装置等:顺畅、精准的关节驱动

实现服务机器人的顺畅、精准驱动的间接驱动的机制。
日本电产集团持有运用滑环和电位计等顺畅地控制服务机器人的关节和旋转部的技术。
例如,物流搬运机器人在使用上要求365天每天24小时运转,也有像看护用机器人和动力辅助服一样,必须具备非常坚固的结构和较高可靠性的机器人。
这些机器人的关节部和旋转部所用到的导线由于反复弯曲有造成断线的危险。
并且,为了确保精准的运转,需要对关节和旋转部进行精密的传感和控制。
滑环
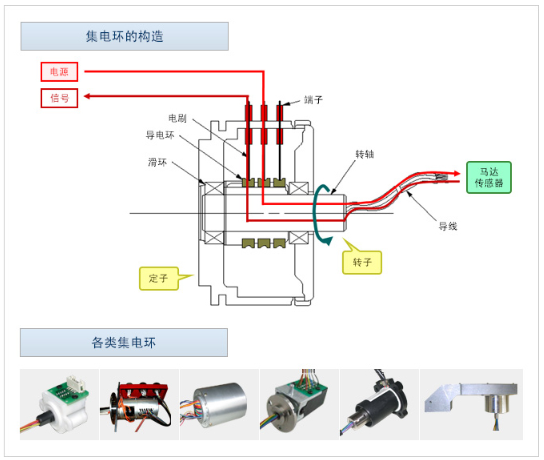 进行旋转部供电和信号传递的滑环
进行旋转部供电和信号传递的滑环通常,用于旋转部和关节的导线会在轴上卷绕或是扭曲,而反复的扭曲造成的金属疲劳有可能导致断线。若在旋转部、关节部使用日本电产伺服公司的滑环,可以防止由于卷绕、扭曲、弯曲造成的断线。并且,不仅可以从电源供电,还可以从电源进行数据通信。
电位仪
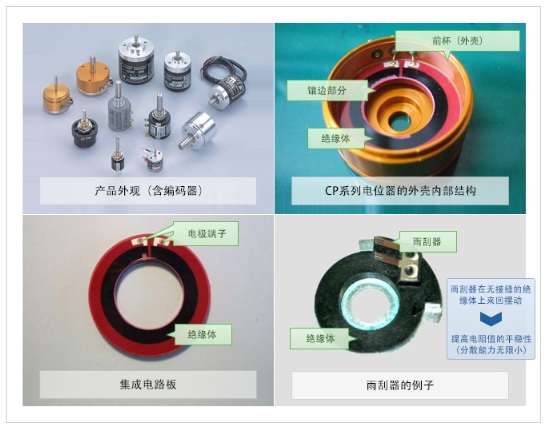 传感正确旋转角度的电位仪
传感正确旋转角度的电位仪电位仪(※)可以高精度地检测出旋转角度和位置。特别是导电性树脂型电位仪,由于其的滑动阻力极小,而又兼具极高的分辨率(理论上无限小)、长寿命、低扭矩、低噪音的特征,通过将电位仪用于服务机器人的关节,可以进行正确的位置检测和动作控制。
※电位仪由日本电产科宝、日本电产科宝电子、日本电产伺服设计制造。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
服务机器人
+关注
关注
9文章
598浏览量
54532 -
电位计
+关注
关注
0文章
255浏览量
17952
发布评论请先 登录
相关推荐
热点推荐
捷米特JM-ETH-CP以太网模块在汽车零部件机器人喷涂场景经典应用案例
,其中六轴机型占比73.5%,广泛应用于汽车零部件喷涂领域。机器人喷涂核心需求为:喷涂参数精准控制、PLC与触摸屏/上位机协同通讯、远程运维调试,且需适配车间防爆、防粉尘、强电磁干扰工

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统机器人遇到意外阻力会硬顶,容
发表于 04-17 17:27
Kasite机器人主轴:新能源汽车零部件钻孔加工技术升级
,在此背景下,工业机器人搭配Kasite高速电主轴的自动化钻孔方案应运而生,成为新能源汽车零部件钻孔加工的优选解决方案。 一、新能源汽车零部件钻孔加工的需求 []()[]()新能源汽车核心部件
EtherNet/IP转EtherCAT网关助力汽车零部件装配产线设备互联互通
一、项目背景与通讯痛点 某汽车零部件企业升级发动机装配产线,引入 领行EtherNet/IP协议移动协作机器人 ,负责发动机螺栓拧紧、零件上料等工序;产线控制核心采用汇川AM400系列

通讯零部件CNC加工:您的零部件加工真的确定够“快”吗
滤波器腔体、天线振子、射频连接器等关键通讯零部件制造的核心支撑,其技术应用的合理性直接决定通讯设备的信号传输质量与运行可靠性。 一、通讯零部件CNC加工的材料选型与参数适配:技术实施的核心基础 通讯
复合机器人识别抓取系统如何重塑汽车零部件柔性产线
本文深度解析复合机器人如何通过移动平台、视觉识别与柔性抓取技术,解决汽车零部件多品种小批量生产的上下料难题。阐述其对产线效率、投资回报及智能工厂建设的核心价值,适用于制造企业管理者、技术决策者及产业

复合机器人:推动汽车零部件制造迈向“柔性智造”新时代
随着全球汽车产业进入电动化、智能化及个性化消费的新纪元,汽车零部件的生产模式也在迅速转型。从传统的大批量生产到灵活的小批量、混线生产,汽车零部件的制造方式正面临着严峻的挑战。复合机器人,作为 智能
机器人内部零配件的生产加工厂从哪找?
加工机器人某个零部件的压铸外壳时,通过五轴联动技术,可以一次性完成外壳的所有复杂曲面加工,不仅提高了加工效率,更保证了零件的整体精度。
1.6 车铣复合五金加工 —— 工序集成的效率革命
车铣复合加工
发表于 12-09 18:22
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
粉尘、高温等极端环境下信号衰减的难题。在 “精密装配” 比赛中,参赛队借助升级后的磁编码器,将机器人手指夹持精度从 0.2mm 提升至 0.05mm,成功完成 0.3mm 间隙的零件对接,助力团队夺冠
发表于 08-26 10:02
关于零部件清洗机工艺流程的详细介绍
零部件清洗机在工艺选择合适的碱性清洗液,利用50℃-90℃的热水进行清洗,之后还需要将零部件进行干燥的处理,主要是利用热压缩的空气进行吹干,这种方式比较适合优质的零部。

江智机器人公司自制的常用机器人及其主要零部件检测装备
1宗旨江智机器人公司自2016年开始生产机器人至今近10年,已根据自己机器人实际订单需要,自行研制开发生产了机器人以及主要零部件的出厂检验用

工业机器人+高速电主轴,开启新能源汽车零部件加工新时代
一关键领域,Kasite机器人高速电主轴凭借卓越的技术性能与出色的适应性,成为新能源汽车零部件加工的得力助手,为产业发展注入强劲动力。在汽车零部件制造

提升人形机器人运动能力,需要把控运动关节哪些关键参数?
电机、减速器、丝杠则是人形机器人关键运动的关键组成部件。因此在生产制造中,如何精确控制这三大零部件的关键尺寸与参数,成为首要课题。

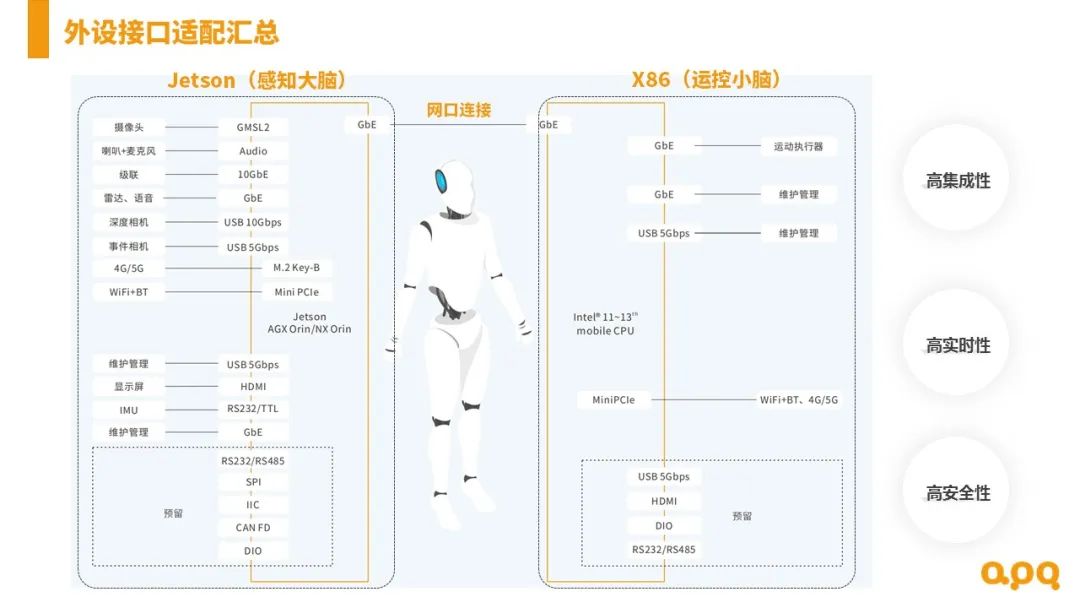
从感知到运控:具身智能机器人控制器的双脑协同设计与场景适配
在具身智能机器人中,每一个零部件都如同人体的器官,各司其职——传感器是它的“感官”,捕捉视觉、触觉、声音等信息;执行器是它的“肌肉”,驱动关节



评论