 CVPR上的新顶流:BEV自动驾驶感知新范式
CVPR上的新顶流:BEV自动驾驶感知新范式

在高级别自动驾驶功能应用中,车辆的智驾系统必须能够解决corner case,即罕见却又无法完全避免的极端场景。这些场景数据样本较少,一旦模型不能有效识别,可能引发严重的安全事故。
前段时间,百度在Create大会上的辅助驾驶板块发布了一个挺硬核的内容,或许能有效解决corner case,车路一体的BEV感知方案——UniBEV。
BEV自动驾驶感知好比一个从高处统观全局的“上帝视角”,将三维环境信息投影到二维平面,以俯视视角展示环境中的物体和地形。在路径规划、障碍物检测、自动驾驶决策等方面,BEV感知都展现出了其独特的优势。
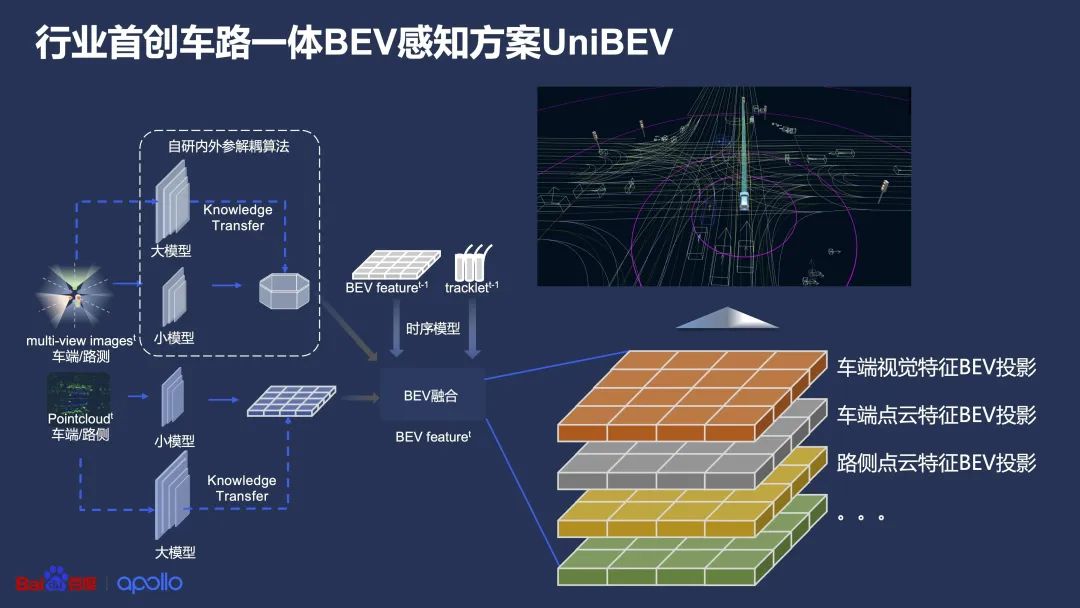
车路一体的BEV感知方案——UniBEV
路径规划:BEV感知可以将复杂的道路信息简化为一系列的路径点,使得路径规划更加简单、准确。
障碍物检测:BEV感知能够清晰地展示出车辆周围的障碍物,包括车辆、行人、道路标志等,使得障碍物的检测和识别更加准确。
自动驾驶决策:BEV感知可以为自动驾驶系统提供全面的环境信息,帮助系统做出更加智能的决策。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
检测
+关注
关注
5文章
4981浏览量
94413 -
自动驾驶
+关注
关注
795文章
15069浏览量
182058
原文标题:CVPR上的新顶流:BEV自动驾驶感知新范式
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
时间同步如何让自动驾驶感知系统认知统一?
[首发于智驾最前沿微信公众号]在探讨自动驾驶时,人们关注比较多的是算法的先进性或算力的强弱,但在其底层,有一个决定了系统成败的基础设施,即时间同步。 自动驾驶感知系统之所以必须高度重视时间同步

自动驾驶感知硬件清洁装置应如何设计?
在自动驾驶发展过程中,感知系统的可靠性一直是大家讨论的热点。尽管目前的传感器在探测距离、分辨率和响应速度上已经取得了长足进步,但有一个产品落地时必须考虑却鲜被讨论的问题,那就是感知硬件的脏污处理。
为什么光照对纯视觉自动驾驶影响较大?
在自动驾驶的技术路线中,纯视觉方案因其模仿人类驾驶逻辑与低廉的硬件成本,一直是很多车企的选择。但这种高度依赖摄像头的感知方式,在夜幕降临、车辆驶入幽暗的隧道,或是遭遇强烈的逆光直射、漫天的雨雪浓雾时,
自动驾驶与具身智能感知系统的设计优先级有何差异?
[首发于智驾最前沿微信公众号]自动驾驶与具身智能经常被同提并论,甚至有人将自动驾驶视为具身智能在交通场景下的一个子集。从物理形式上看,自动驾驶车辆可以被理解为一种“带轮子的身体”,其核

自动驾驶汽车如何完成超车?
经过一套完整的感知、理解、决策、规划和控制的流程,每一步都要考虑安全和规范,需要不断感知周围环境,判断什么时候超车、怎么超车、是否安全等,然后才可以按照计划执行操作。 自动驾驶汽车在变道前需要全面看懂如前车

自动驾驶汽车如何实现自动驾驶
人类驾驶员而言是非常直观且有效的指令,但对于自动驾驶汽车来说,则意味着需要一套极其复杂的感知、理解与决策链路。 自动驾驶如何看清文字? 自动驾驶

自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案
波动。BEV(Bird's-Eye-View)感知技术以其尺度变化小、视角遮挡少的显著优势,正成为自动驾驶领域的关键技术,而高精度时间同步是确保BEV

自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案
一、自动驾驶传感器融合中的时间同步重要性 在自动驾驶感知体系中,BEV(Bird's-Eye-View,鸟瞰图)感知技术凭借尺度变化小、视角

赋能 BEV 感知课题!高校科研多传感器时间同步方案
在高校自动驾驶实验室里,团队可能常以BEV(Bird’s-EyeView)感知架构为研究主线。旨在通过相机阵列和激光雷达的数据,在空间上重建统一的车周环境,为下游检测、分割提供高精度“

自动驾驶感知不一致是怎么发生的?
[首发于智驾最前沿微信公众号]为了让自动驾驶汽车能够安全行驶,很多技术方案中会将多个感知硬件加装到车辆上,以确保自动驾驶汽车感知冗余,但

自动驾驶中感知、决策、控制都起到什么作用?
自动驾驶的感知、决策与控制是一个高度耦合的系统工程。感知负责把复杂、噪声且有不确定性的外界信息转换为具有语义和概率描述的内部状态;决策基于这些状态做出策略选择,并生成满足动力学和安全约束的轨迹;控制

如何确保自动驾驶汽车感知的准确性?
[首发于智驾最前沿微信公众号]自动驾驶汽车想要自动驾驶,首先要做的就是能对周边环境实现精准感知,也就是能“看”清道路,那自动驾驶汽车如何在复杂、快速变化的道路环境中做到

SONY FCB-CR8530,如何重塑自动驾驶视觉感知格局?
在自动驾驶技术快速发展的当下,车辆对周围环境的精准感知是确保安全与高效运行的关键。凯茉锐电子SONY FCB-CR8530摄像机凭借其卓越性能,正逐渐成为自动驾驶领域视觉感知系统的核心
小鹏汽车在全球AI顶会展示下一代自动驾驶模型
此前,北京时间6月11-14日,计算机视觉顶会CVPR 2025在美国田纳西州纳什维尔举行,小鹏汽车受邀参与自动驾驶研讨会CVPR WAD(Workshop on Autonomous
浅析4D-bev标注技术在自动驾驶领域的重要性
感知领域的一项突破性创新,通过引入时间维度与全局视角,为自动驾驶系统提供了高精度、多模态的时空真值数据,重塑了自动驾驶系统的开发范式。 4D-BEV



评论