 艾为推出一种基于线性Hall+步进马达驱动自适应IPD瞳距调节方案
艾为推出一种基于线性Hall+步进马达驱动自适应IPD瞳距调节方案

随着AI智能化时代的来临,终端设备厂商也在不断尝试多维度地投入智能化产品开发设计,原本只是概念的产品,如今也变成了现实,并逐步应用于各大领域。自从Pico4、Apple Vision Pro的上市,让电驱IPD瞳距调节逐步成为行业“标配”,这种新功能也得到越来越多消费者的认可。为此,今天我们就详细跟大家聊聊,上海艾为电子技术股份有限公司推出的基于线性Hall+Stepper Motor Driver实现的全自动电驱IPD瞳距调节方案。
什么是IPD?为什么需要考虑IPD?
IPD是英文Inter-Pupillary Distance的简写,单位为毫米,中文意思是瞳孔间距离,瞳距又分为双目瞳距和单目瞳距。
图一:双目瞳距间距
很多人都忽视了瞳距的重要性,其实瞳距对视力的影响是至关重要,如果VR眼镜的间距与用户瞳距不匹配,会导致看到的图像边缘被切断以及视觉模糊,进而带来视觉疲劳和眩晕等问题,因此导入自动IPD调节便十分重要。
如何实现电驱式自动IPD调节
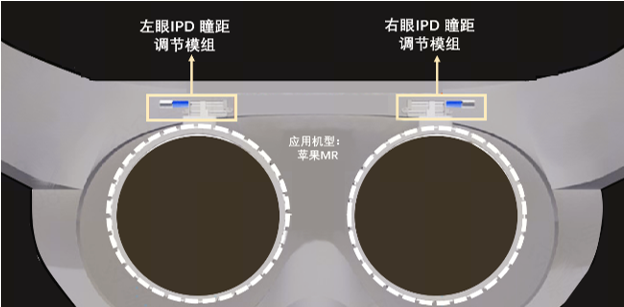
方案1:单目独立式IPD
瞳距调节
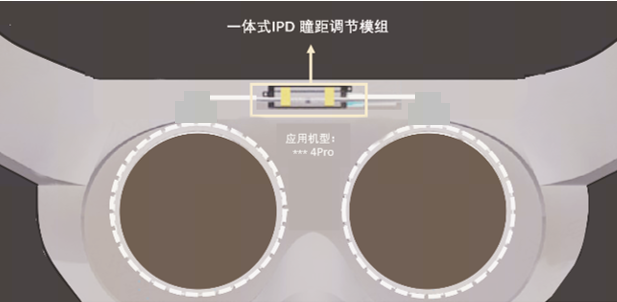
方案2:一体式IPD
瞳距调节
艾为自适应IPD调节系统解决方案
基于这两种实现方式,艾为电子推出了基于线性Hall+微步控制的步进电机驱动自适应IPD调节系统解决方案。该方案集成了1/32微步控制步进电机驱动、高精度低噪声线性Hall作为闭环检测、MCU脉冲控制和数据采集三大核心单元。
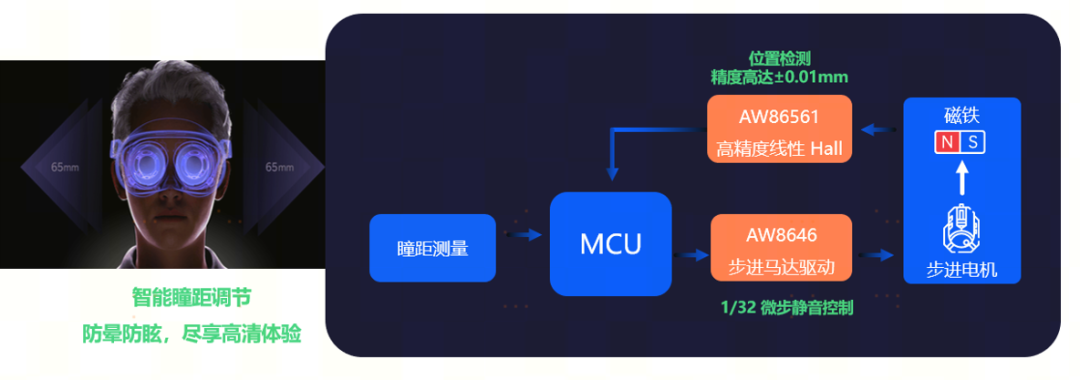
图二:艾为IPD系统解决方案架构图
该系统方案为闭环控制系统,通过AW8646QNR驱动步进马达,机械联动带动丝杆机构和滑块磁铁运动,通过滑块磁铁与位置传感器线性霍尔AW8656XDNR的距离改变,进而改变位置传感器线性Hall AW8656X输出端电压的变化,通过采集不同的电压,反馈出机械结构的变化量,根据线性霍尔反馈的值与目标值进行比较,进一步推动pancake模组运动调节到对准用户瞳距从而实现双目画面的同步调节。
AW8646QNR是一款支持一线步进脉冲控制和自适应Decay放电模式,32微步细分控制步进电机驱动,为高精度低噪声设备提供最佳的解决方案。
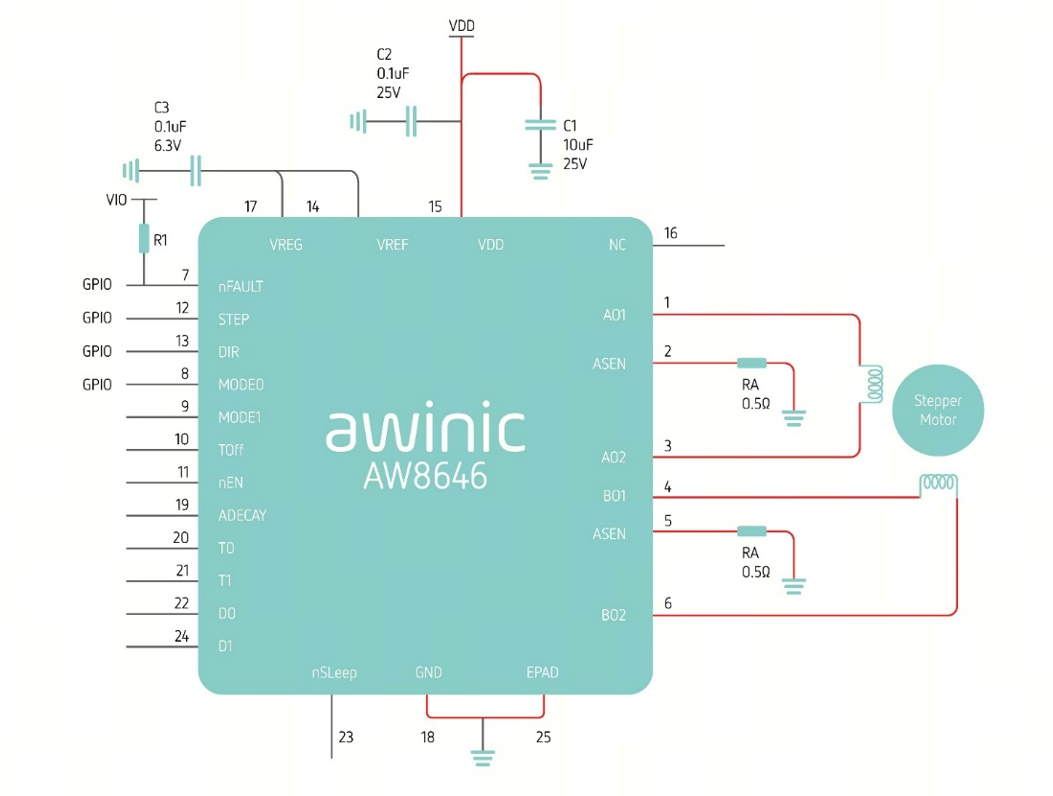
图三 AW8646QNR典型应用电路
AW8646QNR典型特性
3V至12V输入工作电压
MAX Current=1.4A
Step/DIR控制接口
1/2;1/4;1/8;1/16;1/32 Micro Stepping Control
Adaptive decay Mode
支持OCP/OTP/堵转保护
支持温度-40℃~105℃
Package:WBQFN4*4-24L
Slow Decay Mode
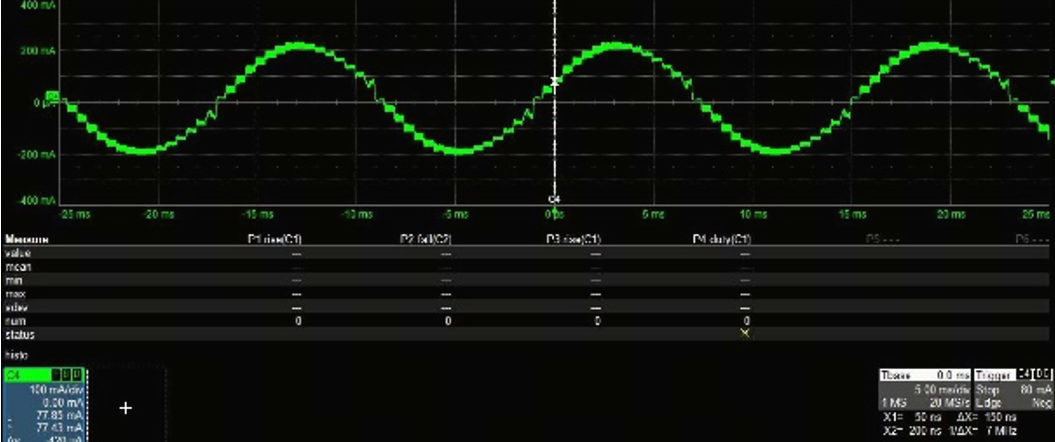
Adaptive Decay Mode
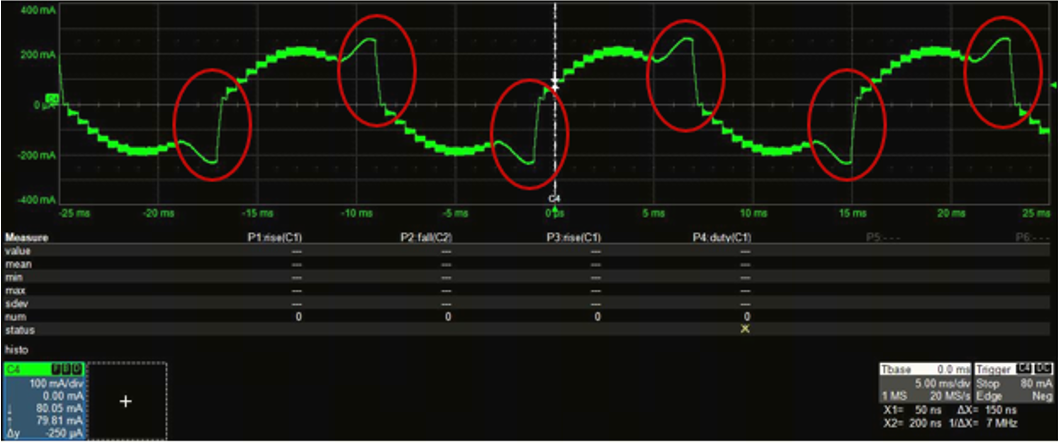
AW8646QNR采用Adaptive Decay控制模式,可以有效抑制反向电动势和电流纹波,有效提升步进电机平滑,高效低噪声运行。
AW8656X系列产品作为闭环检测的反馈回路,该产品涵盖了高、中、低灵敏度,1.25mV/G、2.5mV/G、5.0mV/G、10mV/G满足不同磁场范围下的应用场景的位置精确检测。另外该系列产品支持-40℃~125℃的工作环境,宽电压2.5~5.5V供电,20KHZ采样带宽和Sleep Mode等功能。
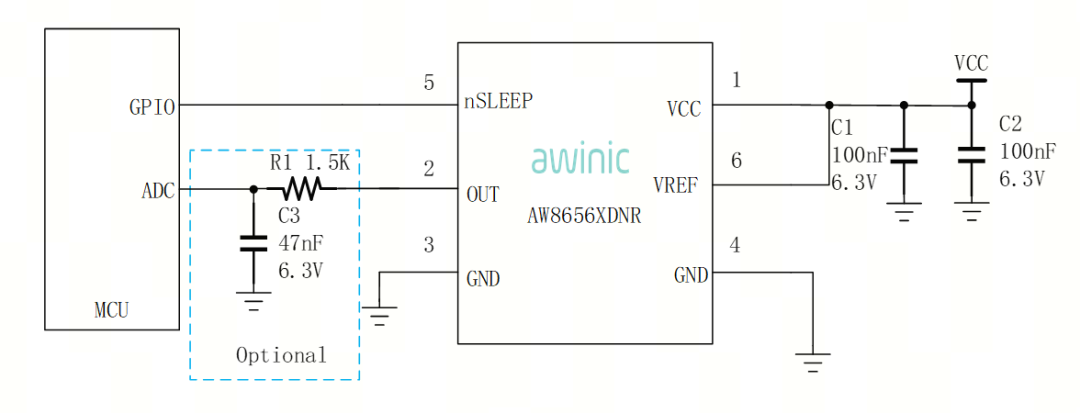
图四 AW8656XDNR典型应用电路
AW8656XDNR系列典型特性
2.5V至5.5V输入工作电压
Sleep Mode Current <1uA
输出静态工作点Vout=(VREF/2)
Sensitivity Selection
AW86560DNR:1.25mV/G
AW86561DNR:2.50mV/G
AW86562DNR:5.00mV/G
AW86563DNR:10.0mV/G
输出线性度<±1.3%
支持温度-40℃~125℃
Package:DFN2*3*0.75-6L
AW8656XDNR产品特性实测
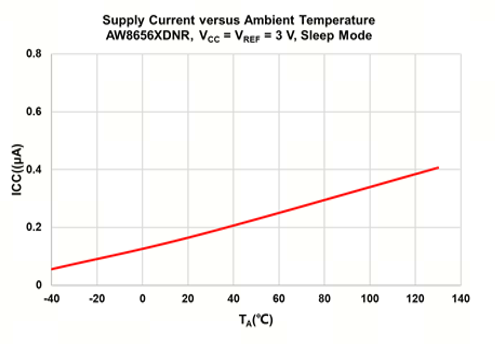
(a) Sleep Current VS Temperature
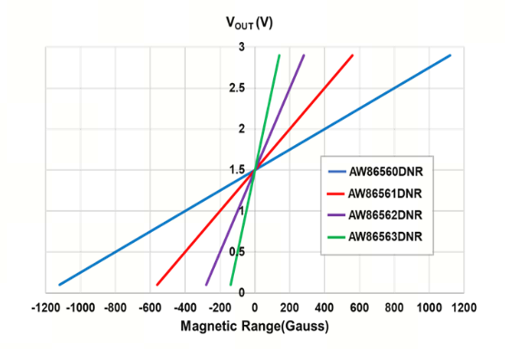
(c) VOUT Range VS Magnetic File
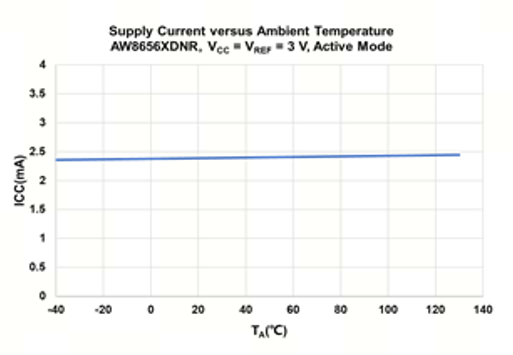
(b) IQ Current VS Temperature
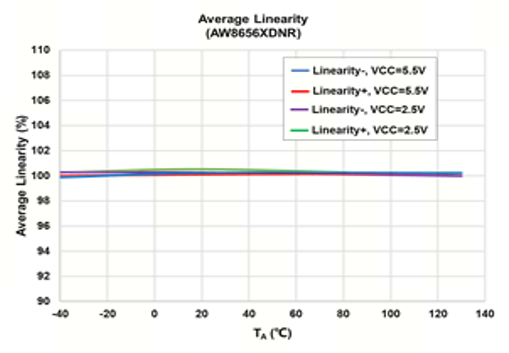
(d) VOUT Linearity VS Temperature
线性Hall AW8656XDNR系列优越的线性度、宽温度响应和微安培级待机功耗,极大提升了产品的应用范围和精度检测控制要求。
IPD 瞳距模组位置检测结构堆叠参考
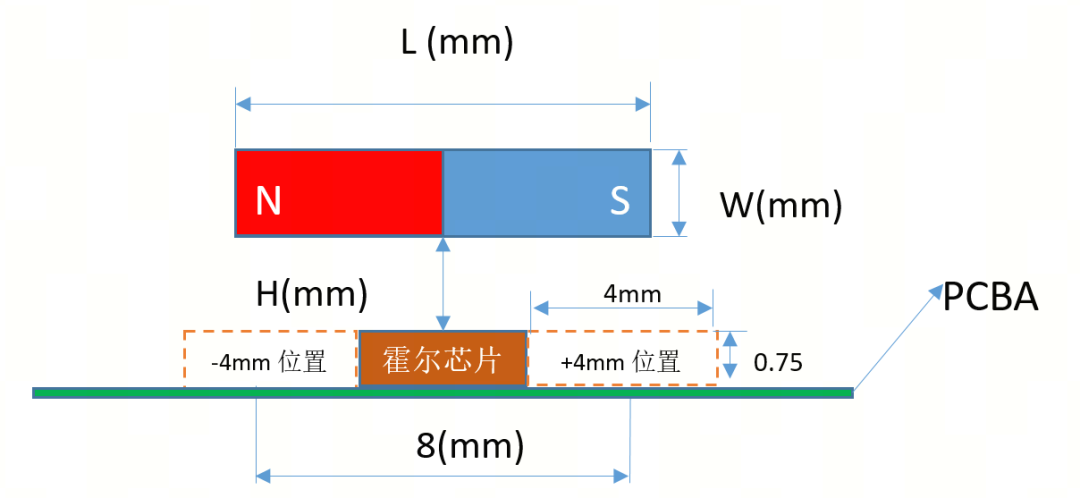
图五 结构参考示意图
审核编辑:刘清
-
控制器
+关注
关注
114文章
17863浏览量
195034 -
步进电机
+关注
关注
153文章
3271浏览量
152738 -
脉冲控制
+关注
关注
0文章
22浏览量
8409 -
IPD
+关注
关注
4文章
90浏览量
27567 -
步进驱动器
+关注
关注
7文章
86浏览量
60032
原文标题:艾为推出基于线性Hall+步进马达驱动自适应IPD瞳距调节方案
文章出处:【微信号:awinicfamily,微信公众号:艾为之家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
扫地机器人行走 / 滚刷 / 吸尘马达分立驱动技术研究与实现-艾毕胜电子
低功耗高集成扫地机器人多马达协同驱动硬件方案设计
无驱动板条件下步进电机控制实现及性能对比
步进电机微步细分驱动板技术及其谐波抑制分析-艾毕胜电子
关于步进电机脉冲和步距角相关的问题

一种磁流变与油气复合两级缓冲系统在直升机自适应起落架中的协同设计与落震性能研究

超低功耗自适应线性功率双端口ADSL/ADSL2+线路驱动器ADLD8403深度解析
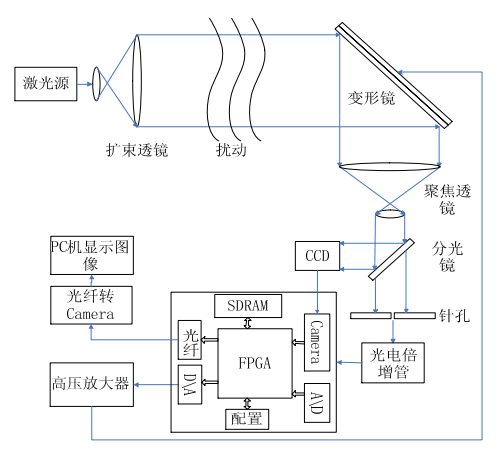
高压放大器驱动:基于FPGA的SPGD自适应光学控制平台的探索
手持吸尘器多模式自适应电机控制与湍流抑制驱动方案
【技术贴】从技术底层到场景落地:艾为Haptic触觉反馈全链路方案深度拆解




评论