 应用案例 | 当机械臂抓取物料时,如何精准拿捏尺度?
应用案例 | 当机械臂抓取物料时,如何精准拿捏尺度?

随着工业自动化行业的不断发展,可以看到越来越多的智能设备采用灵活、高效、精准的机械臂完成定位抓取、组装等。最常见的是使用机器视觉应用,机器视觉将目标物体的图像信息通过光学设备和传感器获取后,将其转化为数字化信息(坐标位置和角度),并依据控制单元指导,使机器可以有效地执行任务。
但这次的任务中,我们选择了更经济的激光位移测距方案来实现机械臂的定位抓取,本期小明就来分享一下具体的应用情况~
场景需求
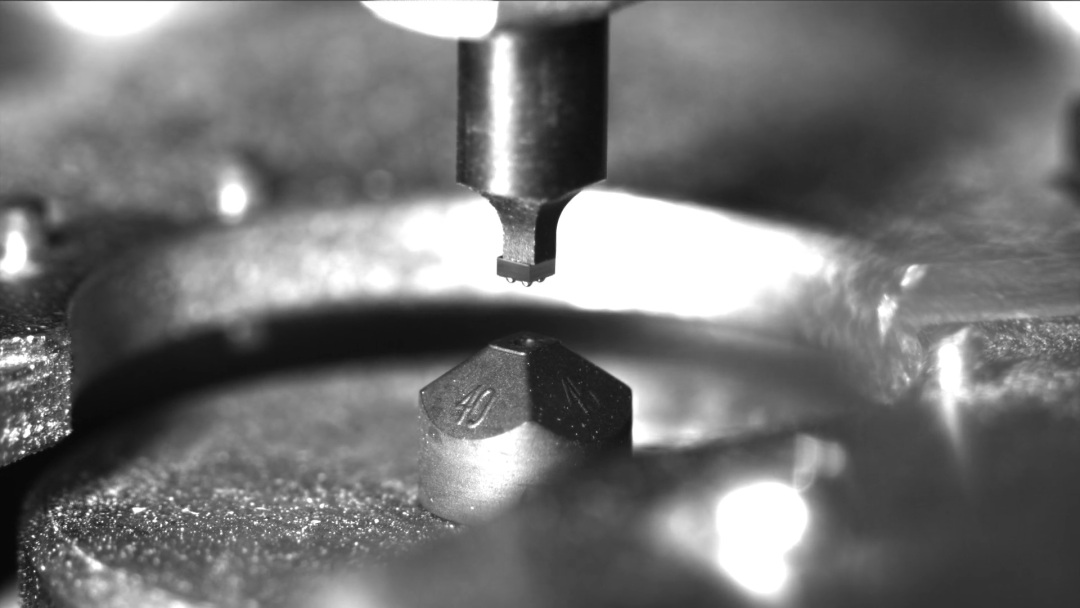
需要使用传感器进行测距,以完成机械臂定位抓取物料
传感器需支持485通讯模式
检测距离500mm
精度要求1mm
选型分析
1、MLD23系列,量程从10mm到160mm,线性精度从0.01mm到0.32mm,适用于一般需求,对精度没有超高要求,又想进行精准定位,普通光电满足不了需求,可以考虑该系列产品,同时它还拥有模拟量信号输出,可将测量数据以电压或者电流形式传输到上位机。
2、MLD21系列,量程从70mm到400mm,线性精度从0.07mm到0.4mm,该系列特点是大量程,适合远距离安装,另外有模拟量和485通讯可供选择,上位机信息交互更为丰富。
3、MLD33系列,量程从8mm到300mm,线性精度从0.008mm到0.3mm,这个系列的优势就在于更高的精度把控,以及正反射系列可以测量透明体,是点激光位移中,不可多得的优势产品,同样有模拟量和422通讯接口。
选型推荐:MLD21-500N-485
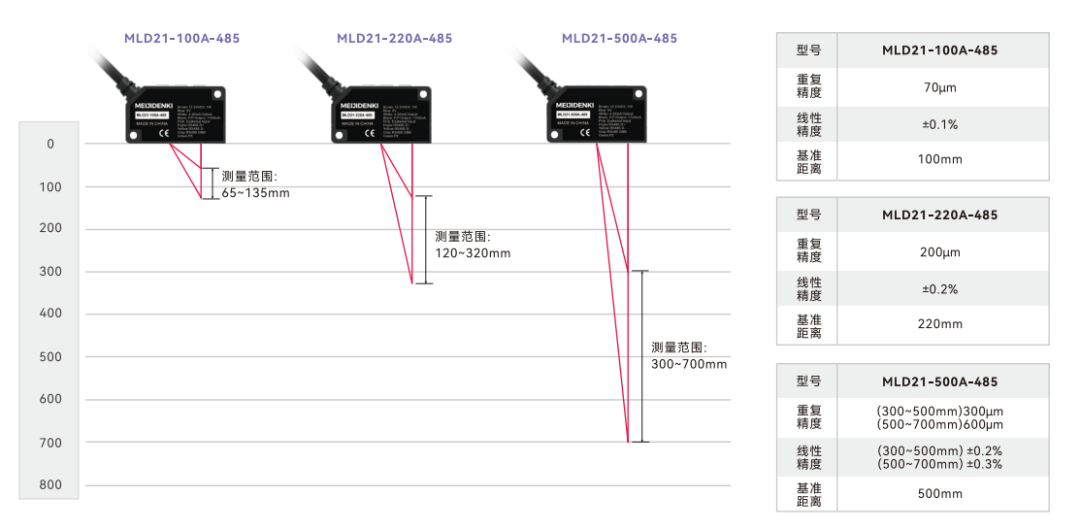
可选用明治大量程激光位移传感器MLD21-500N-485,量程300-700mm
支持485通讯模式,符合客户要求
精度可达0.4mm,可稳定进行定位
采用CMOS感光元件利用三角反射测量原理实现高精度检测
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
工业
+关注
关注
3文章
2471浏览量
49428 -
自动化
+关注
关注
31文章
6024浏览量
90885
发布评论请先 登录
相关推荐
热点推荐
幻尔科技SO-ARM101机械臂,源自全球顶级AI社区Hugging Face的LeRobot项目来了!
这不是一台普通的机械臂。它源自全球顶级AI社区HuggingFace的LeRobot项目,是一个完全开源的“具身智能”实验平台。简单来说,它的使命是为AI赋予一个能够与真实世界交互的身体,让算法从


机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
。本文采用“眼在手上”配置(相机固定在机械臂末端),需同时考虑固定偏移和关节运动。
自研逆运动学 控制6轴机械臂精准
发表于 04-10 21:23
大象机器人myCobot 320机械臂如何凭实力走进顶尖学府
在复旦大学邯郸校区某栋实验楼里,一堂关于《机器人学导论》的课程刚刚结束。学生们没有急着离开,而是围在实验台前,对着桌面上一台精巧的白色机械臂,热烈地讨论着刚刚跑通的抓取算法。
复合机器人对比传统AGV和机械臂的优势何在?
复合机器人对比传统AGV和机械臂的优势,核心在于它突破了单一设备的功能局限,实现了“移动+操作”的深度协同,尤其在上下料和物料转运场景中优势显著。经世智能复合机器人:重新定义上下料与物料

当机械臂学会“双语对话”:Modbus转Profinet如何破解工业互联的困局
在东莞某3C制造车间,工程师老李盯着示波器上跳动的波形陷入沉思——价值千万的机械臂因协议不兼容导致产线停摆,而传统改造方案需要3个月工期。这个场景折射出中国制造业的普遍困境:全球78%的工业设备仍在使用Modbus,而Profinet的实时性优势让85%的高端产线趋之若鹜

传统测试设备的局限与协作机械臂的破局
在协作式测试设备的研发与落地中,北京沃华慧通测控技术有限公司凭借深厚的测控技术积累,成为行业核心赋能者。作为专注于智能测控设备研发的高新技术企业,北京沃华慧通测控技术有限公司深度把握协作机械臂的技术特性,构建了 “机械

经世智能复合机器人赋能3C电子领域,破解物料转运“最后一公里”难题
”搬运,无法完成“线边仓→机台”的精准上下料,需人工辅助,导致流程断点;高精度难题:玻璃屏幕、锂电池等易损部件的抓取误差需控制在亚毫米级,传统机械臂易造成破损,次

机器人机械臂效率提升的革命性解决方案:上海永铭电容器实践
在现代自动化与精密制造中,机器人机械臂(人形/工业)的稳定性与效率至关重要。电容器作为电路中的基本组件,对机器人机械臂的性能发挥着至关重要的作用。01机器人

应用案例 | 赋能半导体良率跃升!深视智能高速摄像机揭秘晶元抓取微观世界
晶元抓取工艺观测难点动作捕捉难:常规观测设备无法精准捕捉机械臂毫秒级的运动细节。损伤难溯源:晶元抓取后易出现隐性崩缺,难以关联振动源。工艺优
创想智控焊缝跟踪+发那科机器人实现工程机械臂架焊接智能化升级
焊也受到工件装配误差等因素的影响。随着智能制造和工业自动化的发展,如何借助先进的传感与控制技术,实现工程机械臂架焊接的精准化与自动化,是工程机械制造行业的重点难题。
复合机器人在实验室物料转运场景的应用价值:低成本,高精度,高柔性
经世智能复合机器人在实验室物料转运场景中,通过技术创新解决了精准抓取、环境适应性和流程协同等核心难题,为不同领域的实验室带来多种应用价值!⚗️一、高精度与安全性:高危环境的可靠替代1、亚毫米级

协作机械臂产品介绍
多元需求比邻星协作机械臂拥有出色的负载表现,别看其外观设计精巧,却能轻松承载较重的物品 。在工业生产中,无论是搬运大型零部件,还是在精密电子制造环节中对微小元器件进行精准操作,它都能稳定运行,重复定位精度极高
发表于 08-07 17:20
•0次下载

GZCOM-NET:为机械臂测试带来高效无线解决方案!
在智慧工厂中,机械臂的性能和安全性需通过静态与动态测试来保障。批量化测试时,后台需实时显示数据曲线和异常数据。GZCOM-NET凭借高效稳定的无线传输,为机械臂测试提供可靠方案。行业背




评论