 江智机器人第一阶段目标达成并进入第二阶段同时开启社会资本融资规划之布局
江智机器人第一阶段目标达成并进入第二阶段同时开启社会资本融资规划之布局

深圳市江智工业技术有限公司自2005年7月21日成立,直至2016年同时进军机器人与自动驾驶装备产业至今。已投入2000多万完成了12款以上适合目前不同领域多场景的机器人产品。同时拥有外观实用发明以及软著包括论文巨著等近40项。在没有专职的销售团队的情况下多年来市场销售平均在1千万以上。
另外江智机器人公司确立了康养机器人为长期重点深度开发的产业领域;已经在厦门厦大高新园区与厦大教授团队成立了合资公司-江智(福建)智能科技有限公司,重点从事机器人基础技术以及元宇宙的研究开发工作。在南创中心的支持下,在广州大学城成立了公司--江智(广州)智能装备科技有限公司,旨在加强大学资源的互补,同时为机器人批量市场做好机器人生产基地的基础工作。
江智机器人公司作为全国最早的人工智能协会---深圳市人工智能行业协会7家发起单位之一。一直积极参与推进国内乃至全球机器人市场产业化进程工作。2022年被评为深港澳科创百强企业。
江智机器人公司为加快在第2阶段取得更为出色的表现。已计划开始以股权方式结合社会资本以及相关资源。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31432浏览量
223613 -
自动驾驶
+关注
关注
794文章
14985浏览量
181465
发布评论请先 登录
相关推荐
热点推荐
地瓜机器人1.2亿美金融资,产业资本和顶级VC集体押注机器人新基建
2026年3月16日,地瓜机器人宣布近期完成1.2亿美元B1轮融资。继2025年完成1亿美元A轮融资后,地瓜机器人A轮、B轮,两轮融资总额达
发表于 03-16 10:50
•860次阅读

华为在MWC 2026正式发布核心网AN L4目标解决方案CORESpirit
,发布了核心网AN L4目标解决方案CORESpirit。他认为核心网AN L4应该聚焦高稳和高效两大目标,第一阶段实现故障和变更两大价值场景的自治,第二阶段实现具备
从共识到共行:拓普联科APQP深度共创会引领跨部门协同新范式
1月5日下午2时,拓普联科公司会议室再次凝聚起一股全神贯注的思考力量。继第一阶段成功开启“团队如何分工协作,一次性把产品做好”系列共创活动后,第二阶

关于数据中心选址问题的三个发展阶段?
都在500平方米以下。 这时候的机房一般都位于市中心的各大办公楼中,比如银行、保险、电力、政府机关等单位,其机房与办公楼都融为一体。即使到今天,在大街小巷的办公大楼中仍然有大量微型的数据中心在运行。 第二阶段,选
【前瞻技术布局】咖啡机器人:具身智能技术首阶段探索与实践
-动作”大模型等方法研究。本文主要以第一阶段 咖啡机器人 任务场景为切入点,来阐述所取得的技术突破,以及后续技术优化方向。如下是机器人全程自主完成打咖啡的视频。 二、问题定义和路径选择

Wi-Fi FEM正在迎来终局之战
创业之初,我把Wi-Fi FEM赛道竞争分为两个阶段,第一阶段为三伍微与近20家初创公司竞争,第二阶段为三伍微与康希通信和手机PA公司竞争。
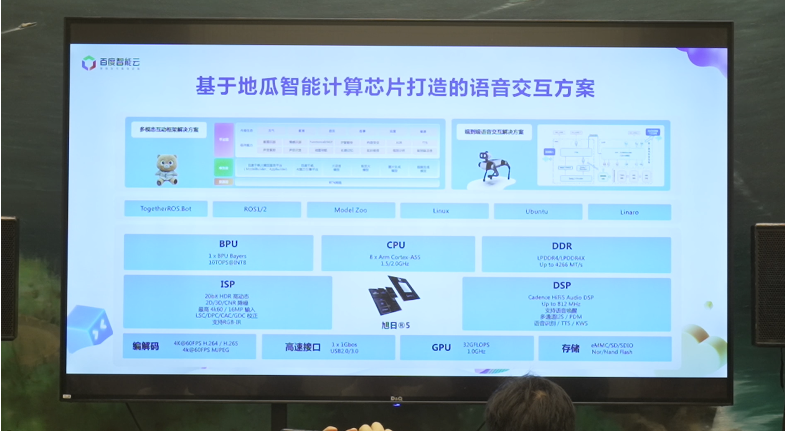
端到端语音交互革命:百度智能云联合地瓜机器人,重塑AI陪伴体验
总监孙颖欣在地瓜机器人的DDC2025 人机交互分论坛上指出,大模型时代的交互方式经历了三个关键阶段的演进:第一阶段是文本、语音交互第二阶段是多模态融合交互,结合语音、视觉、动作等多通
发表于 12-01 01:07
•1846次阅读
今日看点:我国已完成第一阶段6G技术试验;曝阿里秘密启动“千问”项目对标ChatGPT 我国已完成第一阶段
数字信息网络基础设施,将实现通信、感知、计算、智能等多技术融合创新,服务对象从人、机、物拓展到智能体,服务空间从地面拓展到空天地一体化,实现万物智联、数字孪生的目标。 我国6G技术试验分为三个
发表于 11-14 10:08
•1407次阅读
未来工业AI发展的三个必然阶段
与优化 能力的深层革命。 未来十年,工业AI的发展将经历三个清晰的阶段: 智能辅助 → 智能决策 → 自主优化 。这三次进化,构成了工业从“人控机器”到“机器共智”的核心路径。

飞凌嵌入式ElfBoard ELF 1板卡-uboot启动流程分析之uboot启动阶段
(arch/arm/cpu/armv7/start.S)函数, reset函数进行设置CPU运行模式,关闭中断等一系列CPU内部环境初始化后,跳转到_main函数。第二阶段通过_main函数进入
发表于 05-30 09:24
关于AI工厂三阶段模型
在今天(2025年5月20日)的Computex大会上,富士康董事长刘扬伟发表了以“AI工厂三阶段模型”及“Genesis”为核心的Keynote演讲,提到鸿海集团在AI转型中的战略布局。这一

嵌入式开发入门指南:从零开始学习嵌入式
基础 3. 学习路径推荐第一阶段:熟悉开发环境(如Keil、IAR、STM32)第二阶段:掌握裸机编程与驱动开发第三阶段:学习RTOS(实时操作系统)如FreeRTOS第四阶段:深入理
发表于 05-15 09:29
如何使用EZUSB-CX3实现双阶段引导加载程序?
我对如何使用 EZUSB-CX3 实现双阶段引导加载程序有点困惑。我想要的是,当有新的 cx3 映像时,我希望能够从 cx3 固件引导到第二阶段引导加载程序,然后将新映像刷新到 SPI 并引导回主
发表于 05-12 08:26
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:运动控制是机器人开发的核心内容之
发表于 04-27 11:24



评论