 开发者说 | 脏宝Dirty Bae——基于OriginBot的小小桌面清洁机器人
开发者说 | 脏宝Dirty Bae——基于OriginBot的小小桌面清洁机器人

实现功能
按具体功能划分
自主清理垃圾——将桌面大的垃圾推到地面,小的垃圾(和尘土)收集进入垃圾储藏室
语音控制、手机App控制、键盘控制、手势控制
人体跟踪、猫狗跟踪、语音交互(到杯子那里去,到垃圾桶那里去,把杯子推回来,建图后打乱桌面物品让车子恢复原样,播报摄像头的检测到的内容,发现人站在车前播放:别当我路等等,功能取决于你的想象)
按涉及领域划分
语音交互:语音唤醒、语音开关机、语音控制车辆运动、语音调参、语音启停进程(开启关闭人体跟踪控制)、被识别物体语音播报
感知:目标检测与分割、根据自车位置推测目标的平面位置和尺寸(结合cam和lidar)
定位建图:slam建图和更新(包括正障碍-杯子, 结合tof建立负障碍-桌面边缘)
规划控制:导航规划,路径规划,跟踪控制
硬件组成
硬件结构图
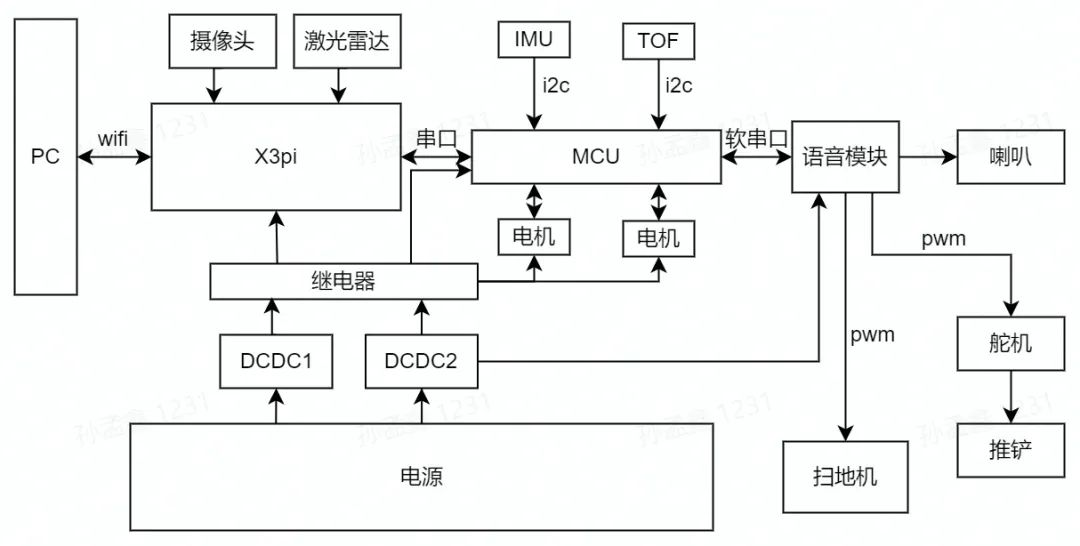
说明
摄像头识别,激光雷达slam建图
IMU和轮速计(编码器)odom推算
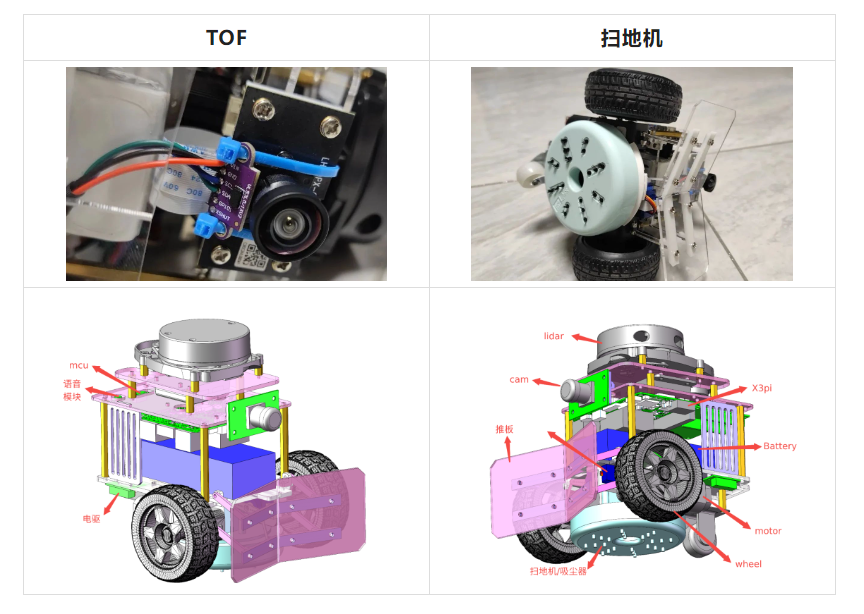
TOF是斜向下安装,用于提前检测车辆是否到达桌面边缘,如下图
继电器用于控制耗电量大的设备(语音模块可以长期待机)
软件组成
arduino用到了两个库,这连两个i2c总线设备共用一路i2c :tof
mpu9250(imu的校准程序在此库的历程里面,由于nano内存有限,需要校准imu的话需要先通过例程程序校准)
端口定义
const uint8_t Motor1_PinA = 5; const uint8_t Motor1_PinB = 6; const uint8_t Motor2_PinA = 9; const uint8_t Motor2_PinB = 10; const uint8_t Encoder1_PinA = 2; //中断1 const uint8_t Encoder1_PinB = 4; const uint8_t Encoder2_PinA = 3; //中断2 const uint8_t Encoder2_PinB = 7; SoftwareSerial mySerial(12, 13); // RX, TX
通讯协议
主要协议参考:OriginBot智能机器人开源套件
差异在于:
①imu的数据发送 = 处理后的数据/100, 而不是原始数据;
②传感器反馈里面没有电压值,有mcu的循环时间和转发语音板的语音指令;
③控制器资源控制为从x3pi接收到的需要转发的语音板的指令信息。
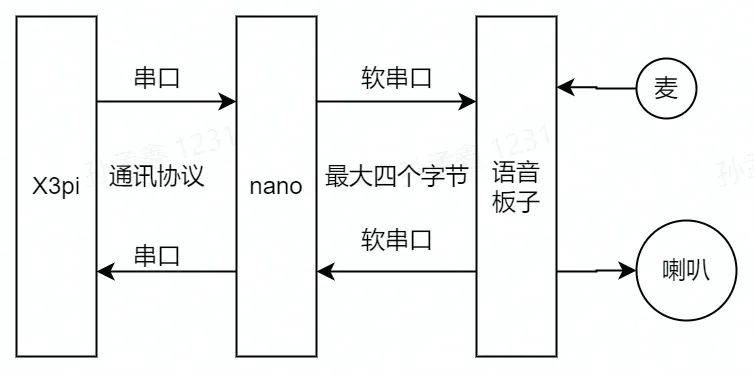
语音板子
由于MCU和语音板子单词最多传输4个字节,且语音板子处理逻辑有限,因此mcu他们之间的传输只能依靠提前定义好的协议(比如 1 = 自建通过),且X3pi和语音板子的通信是通过MCU中转,因此也需要定义他们之前的协议,例如FCOS检测算法的80种类型分别对应80个整数,以此来实现被检测目标名称的语音播报。
本文转自地平线开发者社区
原作者:Mengxin
-
嵌入式
+关注
关注
5212文章
20801浏览量
339118 -
人工智能
+关注
关注
1821文章
50551浏览量
267982 -
深度学习
+关注
关注
73文章
5614浏览量
124807
发布评论请先 登录
TUYA全球开发者大会|从AI植物机器人到狗语翻译,创新AI硬件扎堆首发!

机器人成群结队亮相NVIDIA GTC 2026
长电科技亮相先进封装开发者大会机器人与汽车芯片专场
你好,我是StackChan,超可爱的社区共创开源AI桌面机器人!

NVIDIA Jetson系列开发者套件助力打造面向未来的智能机器人
探索RISC-V在机器人领域的潜力
打造机器人母生态!一年开发者数量翻倍,地瓜机器人发布具身智能大算力开发平台

广和通亮相DDC 2025地瓜机器人开发者大会

NVIDIA助力新一代机器人开发开源框架
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
具身智能家务机器人黑客松报名通道已开启
超过200万开发者加入NVIDIA机器人技术生态




评论