 视觉焊缝跟踪器在机器人上的应用
视觉焊缝跟踪器在机器人上的应用

焊缝跟踪作为一门综合性应用技术,具有多学科交叉融合的特性,包括电子技术、计算机、焊接、结构、材料、流体、光学、电磁等学科,国内外众多研讨工作者投入到这一范畴中止研讨,从示教型焊接机器人到程序控制焊接系统,再到移动式自动焊缝跟踪技术,焊接自动化的每一次进步都显著进步了消费效率。焊接技术的自动化、柔性化与智能化是未来焊接技术展开的必然趋向。
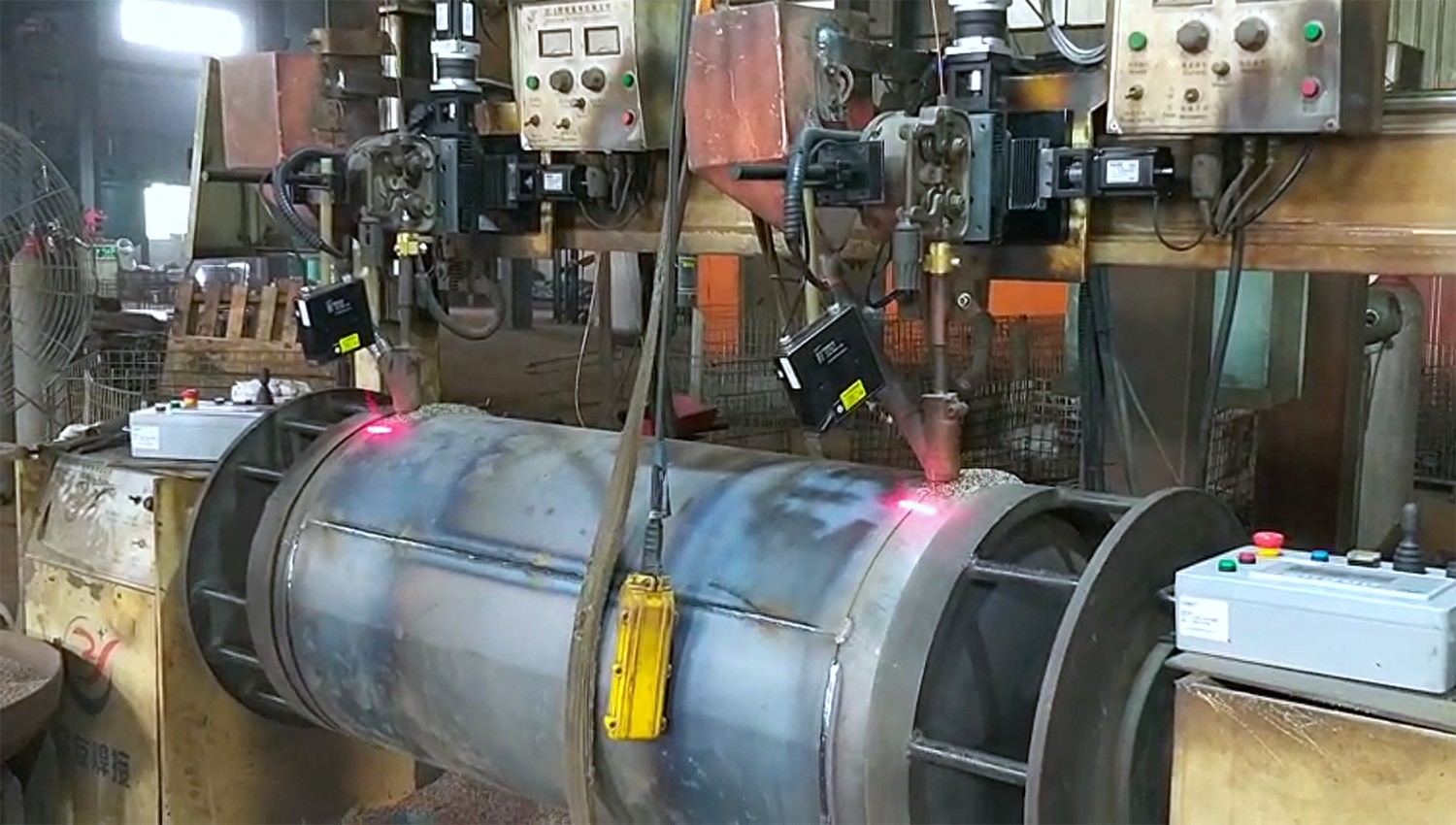
视觉传感器采用的光电转换器件最简单的是单元感光器件,如光电二极管等;其次是一维的感光单元线阵, 如线阵CCD(电荷耦合器件);应用最多的是构造最复杂的二维感光单元面阵,如线阵CCD是二维图像的常规感光器件,代表着目前传感器开展的最新阶段,因此应用日益普遍。在焊接机器人各种视觉传感器中,CCD传感器因其性能牢靠、体积小、价钱低、图像明晰直观而遭到了普遍注重。依据焊接机器人视觉焊接系统的工作方式不同,可将用于焊接机器人视觉焊缝跟踪系统的视觉传感器分为一下3种:构造光式、激光扫描式和直接拍摄电弧式。其中,构造光式和激光扫描式属于主动视觉办法,直接拍摄电弧式则属于被动视觉办法。
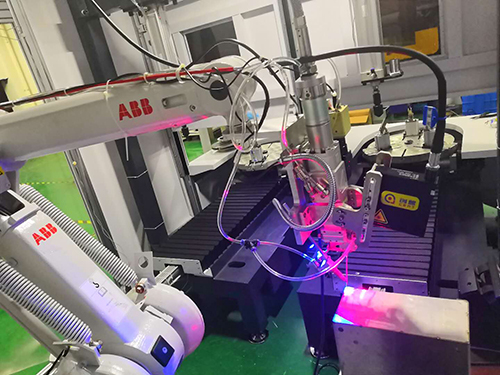
创想智控自主研发的机器人焊缝跟踪系统配合焊接机器人使用,可以正确引导机器人进行焊接定位。
机器人焊缝跟踪系统可将检测出的焊缝的位置和形状信息转化为信号,控制系统对信号进行处理,根据检测结果控制自动调节机构调整焊枪位置,从而实现焊缝自动跟踪。保证焊接质量的可靠性。可以说,焊缝跟踪是保证焊接机器人焊接质量的一个重要的因素,可大幅度提高生产效率及焊接质量,确保焊接安全及焊缝完美。
据不完全统计,视觉传感技术未能在焊接机器人领域大批量应用的主要原因是“技术成熟度”“成本控制”。
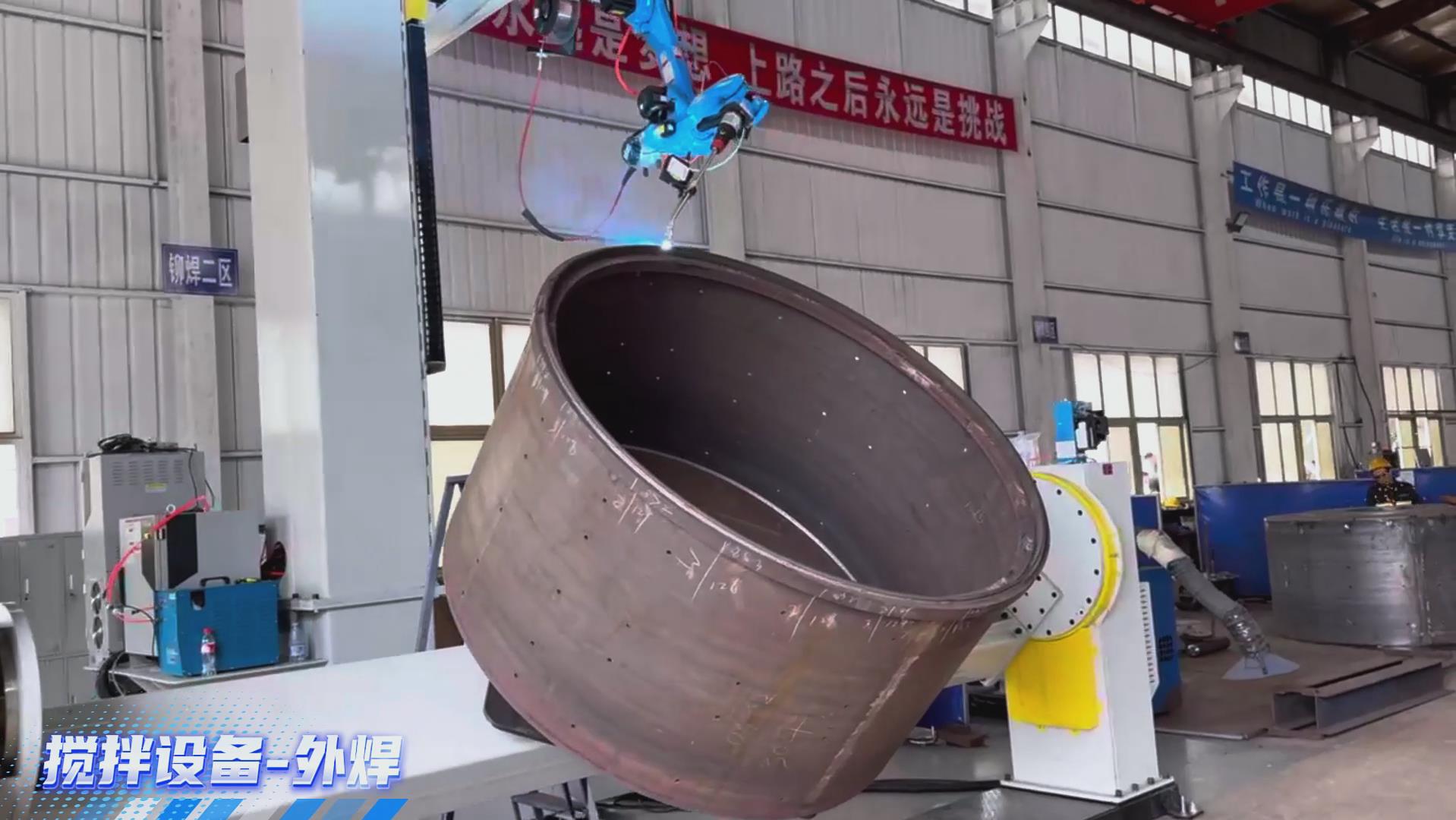
创想智控机器人焊缝跟踪系统
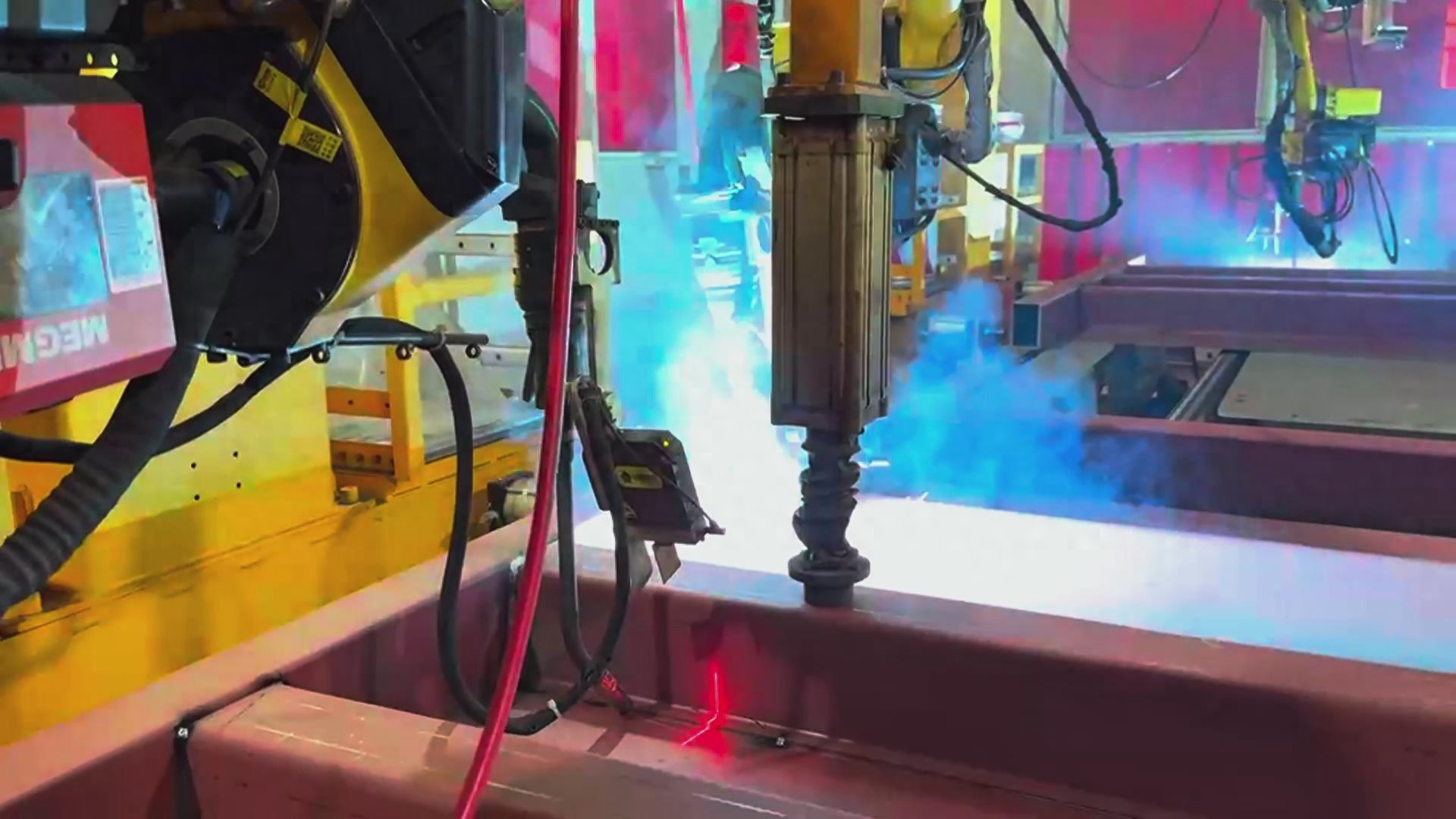
1、从技术成熟度角度讲,很多视觉传感技术不能全部实现各品牌机器人的完美适配,创想智控经过多年的技术创新及实操经验的累积,现在可以适配近日系、欧系、国产等近40种机器人。
2、从成本控制角度讲,创想智控的激光焊缝跟踪系统无需工控机在一定程度上降低了成本同时增强了可靠性。
-
焊缝跟踪
+关注
关注
0文章
210浏览量
11133
发布评论请先 登录
探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
巡检机器人落地攻略:RK3576驱动12路低延迟视觉
自制巡线解迷宫机器人(上)
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
卡诺普机器人搭载创想焊缝跟踪系统,实现搅拌设备焊接智能化升级
创想智控焊缝跟踪系统携手广数机器人实现农机齿轮焊接智能化升级
工业机器人的特点
创想智控激光焊缝跟踪系统在发那科机器人智能焊接火车端墙的应用
创想智控激光焊缝跟踪适配安川机器人双机协同自动焊接变压器油箱

工业相机在焊缝跟踪中的关键作用有哪些



评论