 科聪:应对不同应用现场,高效完成移动机器人实施部署
科聪:应对不同应用现场,高效完成移动机器人实施部署

高度自由易上手 快速实施移动机器人

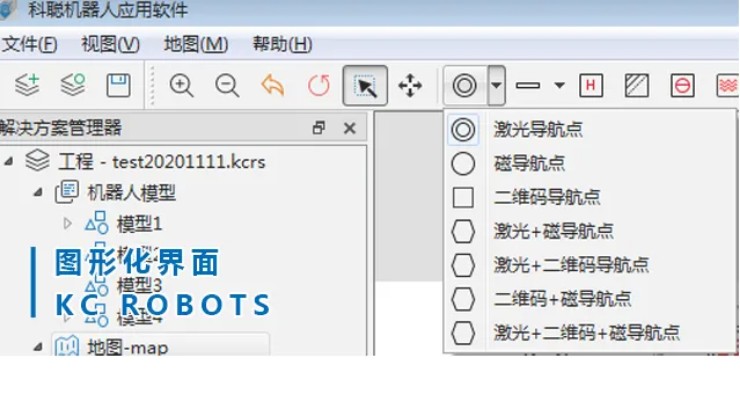
友好图形化界面设计 快速编辑地图
通过图标的方式展示工具类型,直观展示不同种类信息。将多种功能封装成图标按钮,多数操作用鼠标就能解决,大大减少键盘输入,增加软件易用性,提高实施效率。可自由进行编辑、拼接、叠加、擦除地图等操作,最大支持40 0000 ㎡地图,支持多楼层地图。
激光自动标定 任务完成更高效
自动标定工具包括底盘标定、导航标定,所有标定的参数及计算都由系统自动完成,以中和机械结构的差异性以及人工安装的差异性。自动标定工具解决了以往用户只能手动标定机器人时操作繁琐、花费时间过长等问题,极大缩小了用户的标定时间同时也使机器人导航精度快速达到要求。

基于混合导航 文件追加制图
移动机器人将使用混合导航的情况下,软件可对已有地图进行追加制图,不必重新制图,快速融入应用场景,避免因重新实施带来的误工、误产的情况,最大程度保障客户现场效率。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AMR
+关注
关注
3文章
491浏览量
32304 -
移动机器人
+关注
关注
2文章
820浏览量
34937 -
AGV
+关注
关注
28文章
1573浏览量
43796
发布评论请先 登录
相关推荐
热点推荐
为移动机器人量身定制的RK3588工控机,保障AGV与AMR稳定运行
随着智能制造与智慧物流的迅猛发展,AGV和AMR已成为工厂和仓库中不可或缺的“搬运工”。这些移动机器人的核心,是一套集导航定位、运动控制、环境感知、任务调度于一体的强大控制系统。针对这一特殊应用场景,NIS-5130-AGV工控机以瑞芯微RK3588处理器为核心,为移动机器人

电压放大器在四足压电移动机器人运动输出特性实验中的应用
致动的四足压电移动机器人的运动输出特性,探究激励电压、频率、斜坡信号对称度、工作表面等因素对其运动的影响,进而确定该机器人的最优工作频率、工作电压及激励信号参数以实现高效激励,同时验证该机器人

探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能 在电子工程的世界里,不断有新的硬件产品涌现,为我们的设计带来更多的可能性。今天,我要和大家深入探讨一款专为移动机器人
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅
MR-VMU-RT1176快速上手:开启移动机器人车辆管理单元设计之旅 在移动机器人领域,车辆管理单元(VMU)的性能至关重要。今天要给大家介绍的是 NXP 的 MR-VMU-RT1176,一款
MR-BMS771参考设计:适用于移动机器人的电池管理系统
MR-BMS771参考设计:适用于移动机器人的电池管理系统 一、引言 在移动机器人领域,可靠的电池管理系统(BMS)至关重要。NXP的MR - BMS771参考设计为工程师提供了一个出色的解决方案
Infineon移动机器人电机控制方案深度解析
Infineon移动机器人电机控制方案深度解析 在当今科技飞速发展的时代,移动机器人在物流、生产、服务等众多领域的应用日益广泛。电机控制作为移动机器人的核心技术之一,其性能直接影响着机器人
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选
Infineon DEMO_IMR_BMSPWR_V1:移动机器人电池管理系统的卓越之选 在当今科技飞速发展的时代,移动机器人在物流、仓储、医疗等众多领域发挥着越来越重要的作用。而电池管理系统
Infineon DEMO_IMR_BMSCTRL_V1:助力移动机器人电池管理的创新方案
。而电池管理系统(BMS)作为移动机器人的关键组成部分,对于保障机器人的稳定运行和电池的安全高效使用起着至关重要的作用。今天,我们就来深入了解一下英飞凌(Infineon)推出的DEMO_IMR_BMSCTRL_V1演示板,看看
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭
GGII预计,2025年中国移动机器人销量有望达到12.6万台,总量同比增长约12.7%。这也催生了对上游激光雷达的需求。本文将重点介绍智能物流体系中移动机器人的雷达性能要求和新品。

安森美产品如何助力打造下一代自主移动机器人
类员工严格隔离的。不过,细心的小伙伴会发现,随着新一代自主移动机器人(AMR)的出现,机器人在人们心目中的刻板形象正在被打破,它们正在被赋予新的含义,并开始真正走入我们的生活。
移动机器人技术的发展历程
本白皮书聚焦于移动机器人领域的进展与挑战,重点探讨三个核心主题:机器人运动控制、复杂环境中的感知与导航,以及在适应新任务时的模块化与灵活性。此外,文中还重点介绍了机器人系统从简单的固定机械臂到复杂人形
恩智浦自主移动机器人设计要点
长期以来,自动化机器人一直被视为科幻小说中的概念,而如今这一技术已成为现实,并正在大规模部署。在机器人技术领域,自主移动机器人 (AMR) 是发展最快的创新技术之一。

瑞芯微 RK3568/3588:为移动机器人注入智慧动力引擎
移动机器人,正从科幻想象快步走入现实生活。它们依据应用场景与功能,主要分为三大类: 工业移动机器人: 如AGV(自动导引车)、AMR(自主移动机器人),专注于物流搬运与产线协同,提升效率与柔性

轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成本低廉、所用元件易于购置,具有较好的实用的价值和应用前景。
纯
发表于 06-11 14:30



评论