 【虹科】三维点云建模:迎来复原历史建筑的新纪元
【虹科】三维点云建模:迎来复原历史建筑的新纪元

关于虹科智能感知虹科智能感知事业部专注于智能感知与机器视觉领域,已经和IDS,Blickfeld和Gidel等有着重要地位的国际公司展开深度的技术合作。我们的解决方案包括3D激光雷达,工业相机,视觉处理平台,图像采集卡及视觉系统集成等。虹科的工程师积极参与国内外专业协会和联盟的活动,我们非常重视技术培训和积累,公司定期与国内外专家团队进行交流和培训。虹科合作伙伴PointFuse的特邀作者Mark 介绍点云数据如何复原历史建筑。为了确保在各学科之间的平滑协作,减少和处理点云数据的大小至关重要。Mark解释了如何轻松完成这一工作,并准确地复原建筑物的细节部分。2019年4月巴黎圣母院大教堂被烧毁,整个世界只能惊恐地看着。塔楼标志性的尖顶消失了,教堂大部分木质框架也消失了,这些木框是在一千年前由51英亩的森林建成的。没有足够的木材或足够高的树木来取代框架,但这并不全是坏消息:一位热心的历史学家Andrew Tallon的努力,采集一片超过10亿个数据点的点云,映射出大教堂在2010年火灾前的情况。在对圣母院的热情激励下,Tallon开始捕捉它的所有美丽。他使用安装在三脚架上的激光扫描仪,拍摄建筑的每个面——有时甚至将自己的安全问题放在一边,攀爬高台。他还拍摄了全景彩色照片,并将RGB数据保存到点云中。目前,复原工作正在全面展开,结合当代建筑和传统建筑的特色,如果最终的设计能超过1160年原始框架,那将是非常美妙的。如果真的如此,这将部分归功于点云,以及十多年后最先进的点云制图软件,以一种可供建筑师、工程师和复原师使用的方式解析数据。
采用点云格式的优势
可以使用公式描述数学对象;建筑师的图纸提供了一个建筑物的结构视图;照片可以捕捉到一个古老建筑物的美。但是,这些都无法捕捉到一座建筑随时间风化、老化的所有细节和细微差别。 点云捕捉物体或建筑中每一个点的X、Y、Z坐标。这不仅仅意味着每一块砖都被捕捉和记录下来,而且能把每一个凹陷、凹痕和窝点记录下来。背景信息,如RGB数据,有助于形成一个信息库,建立精细的3D模型。过去,模型是由专业的CAD技术人员手工建立的,但现在这个过程可以通过专业软件自动完成,利用点云和扫描过程中捕获的所有数据,虚拟地构建一个真实的建筑副本。下面是还原叙利亚阿勒颇濒临灭绝的遗产地Beit Ghazeleh的视频,是使用专业的点云CAD软件从一个采集了12亿个数据点的样本中构建的。
来自Beit Ghazaleh,采用高精度三维激光扫描仪测绘(12亿个数据点)——叙利亚阿勒颇的一处濒危遗产地。这是一项多方合作的科学工作,以研究、保护和紧急加固该遗迹。困难和挑战
点云可以存储历史建筑微小部分的细节,以便于在未来的某个时刻完整重现——这就像捕捉和保存它的DNA。但是,记录细节也带来了很大的缺点:文件很大,使得保存、分享和使用它们变得非常困难。它还需要很多技术来确定这些点实际代表什么,并将这些点连接起来——即便如此,人为的错误也会带来不准确的结果。而且你会希望来自不同学科的人可以同一个数据上工作,所以能在不同的团队和软件包中无缝使用是至关重要的。云解决方案允许用户访问文件的单一副本,并确保他们是在使用最新的版本。访问协议确保在任何时候只有一个用户可以保存更改。这些问题在任何大规模的建筑项目中都很常见,但复原工作带来了额外的挑战:如何捕捉灾难发生前建筑的"原状",而不仅仅是它现在的样子。当然,我们不可能穿越时空去获得 "当时 "的画面,但我们能做的是让档案员的工作变得更容易,现在的软件使用起来更简单,所以采集建筑物的数据是可以定期进行的。网状结构:每一个点都有关系
宇宙中的每一个点都有一个相对位置,我们可以用矢量来描述这种关系。通过将这些点云转换为相互连接的点的"网格",我们可以去掉多余的数据,减小文件空间——三个点之间的三角形越大,文件就越小。这里的关键是,去掉重复的数据以及我们有时所说的噪音(最终模型中不需要的元素)。当然,如果你手动构建网格,容易出现人为错误,但现在有强大的点云软件应用程序,不需要有经验的CAD技术人员,可以快速准确地完成这项工作,并将文件大小从千兆字节减少到兆字节。复原建筑的三步过程
故事并不是以网格模型结束的。网格本身是达到目的的手段——将点云映射成一个更小但点云同样精细的文件,这些文件可以在不同的BIM系统中被多人同时使用。一个日常的建筑改造会从点云开始,捕捉“已建BIM”或“现状”的位置,代表当前真实情况的快照,建筑师会在此基础上叠加最终设计。然而,当涉及到保护和恢复我们的建筑遗产时,有一个重要的步骤,那就是通过定期的点云“备份”和安全存储来捕获“原状”。LiDAR传感器、其他手持式或佩戴式扫描仪使用户能够进行扫描,但到目前为止,更大和更复杂的扫描通常由第三方供应商处理,他们甚至可能部署无人机技术来详细扫描高层建筑。网格软件不仅可以为大数据量点云和最终设计软件之间提供桥梁,并且提供存档工具,以防最坏的情况发生丢失文件。HK Cube 1固态激光雷达

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
三维
+关注
关注
1文章
531浏览量
30022
发布评论请先 登录
相关推荐
热点推荐
深度相机:从技术突破到全场景落地,解锁三维感知新可能
推动各行业智能化转型的关键设备。不同于传统2D相机只能捕捉平面图像,深度相机能够精确获取场景或物体的三维空间信息,输出深度图与点云数据,让设备拥有“立体视觉”,实现

VirtualLab:光学系统的三维可视化
用于检查元件和探测器的位置,以及快速了解光在系统内的传播。所应用的三维视图建模技术可与经典的光线追迹相媲美。
**如何生成一个系统视图文档
**
一个光学系统的三维视图可以通过两种不同的方式生成
发表于 04-13 09:04
【OFDR】实时感知、动态重构与历史状态回溯!昊衡科技-三维场重构软件
三维场重构软件三维场重构软件通过TCP协议获取传感数据,并实时重构三维温度/应变场。软件支持导入三维模型(.wrl格式)与二维图片(.jpe

昊衡科技 多芯光纤三维形状传感系统,精准感知!
对于空间形态感知要求极高的微创手术领域而言,如何精准、实时地监测柔性结构的三维形变,一直是技术落地过程中的关键痛点。昊衡科技基于自主研发的光频域反射(OFDR)技术与多芯光纤传感方案,推出动态分布式
三维时空与海康威视达成战略合作
11月19日,三维时空软件股份有限公司(以下简称“三维时空”)与杭州海康威视数字技术股份有限公司(以下简称“海康威视”)签署战略合作协议。三维时空董事长林斌、销售总监林科,海康威视副总
激光雷达:智能时代的“感知之眼”,开启三维世界新纪元
,激光雷达凭借其毫米级精度、全天候性能与三维建模能力,成为智能驾驶、机器人、智慧城市等万亿级赛道的核心基础设施。 高精度感知:突破传统传感器的物理极限 传统摄像头在逆光、雨雾中“失明”,毫米波雷达难以识别静

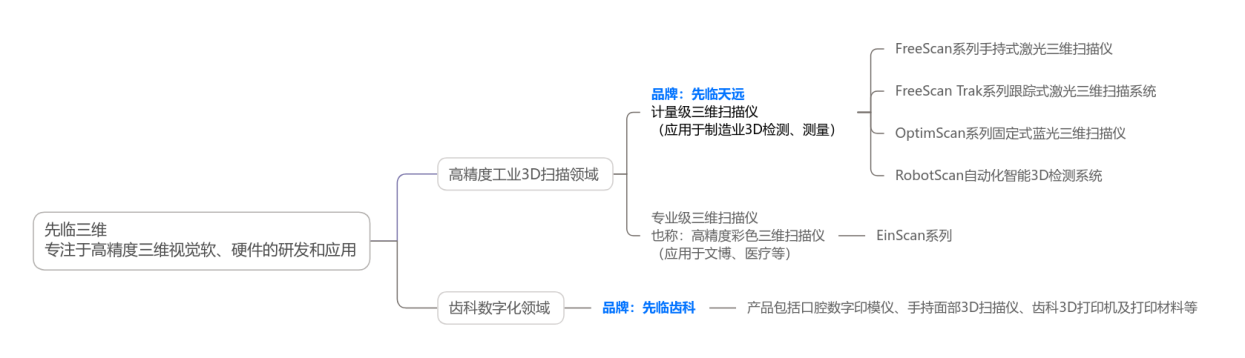
一文读懂 | 三维视觉领域国家级制造业单项冠军——先临三维的品牌布局
,推动高精度三维视觉技术的普及应用。2024年,先临三维营业收入超12亿元,业务遍及全球100+个国家和地区。 先临三维的高精度三维视觉技术深度应用于高精度工业3D扫描(
智慧城市数字孪生三维立体平台,沃思智能
城市的虚拟镜像,实现对物理城市的实时监测、模拟和优化,为城市治理、公共服务和产业发展提供了全新的解决方案。 数字孪生三维立体平台的核心在于其能够将城市的物理空间与数字空间紧密连接。通过高精度的三维建模技术,平

AI 驱动三维逆向:点云降噪算法工具与机器学习建模能力的前沿应用
在三维逆向工程领域,传统方法在处理复杂数据和构建高精度模型时面临诸多挑战。随着人工智能(AI)技术的发展,点云降噪算法工具与机器学习建模能力的应用,为

从 48 小时到 4 小时:三维逆向工程中自动化工具链如何重构扫描建模效率
在三维逆向工程领域,传统人工操作与非自动化工具的组合,使得扫描建模流程繁琐、耗时漫长,单个复杂项目甚至需 48 小时才能完成。随着自动化工具链的兴起,从数据采集到模型构建的全流程实现智能化升级,将

无人机航测三维建模遇难题?索尼FCB-EV9520L来破局!
在数字技术飞速发展的今天,无人机航测三维建模技术已成为城市规划、灾害评估、环境监测等领域的核心工具。而索尼FCB-EV9520L摄像机的出现,为这一技术注入了新的活力,以其卓越的图像采集能力,成为
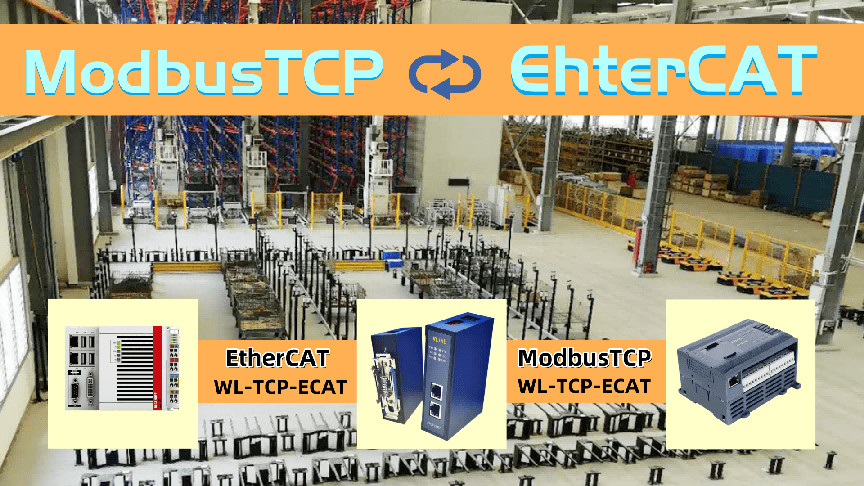
步科倍福手拉手,ModbusTCP主转EtherCAT从,伺服压接迈入新纪元
步科倍福手拉手,ModbusTCP主转EtherCAT从,伺服压接迈入新纪元
如何利用三维建模加速FCB-CR8530的定制化开发?案例与工具详解
领域。然而,传统开发流程中,硬件设计、结构验证与软件调试往往需要多次迭代,导致周期长、成本高。三维建模技术的引入,为FCB-CR8530的定制化开发提供了全新路径,通过数字化仿真与快速验证,显著提升了开发效率。 一、三维
VirtualLab:光学系统的三维可视化
元件和探测器的位置,以及快速了解光在系统内的传播。所应用的三维视图建模技术可与经典的光线追迹相媲美。
如何生成一个系统视图文档
一个光学系统的三维视图可以通过两种不同的方式生成:
1.使用“光线结果
发表于 05-30 08:45



评论