 Arduino Uno板教程案例 100元DIY一个可爱的瓦力机器人
Arduino Uno板教程案例 100元DIY一个可爱的瓦力机器人

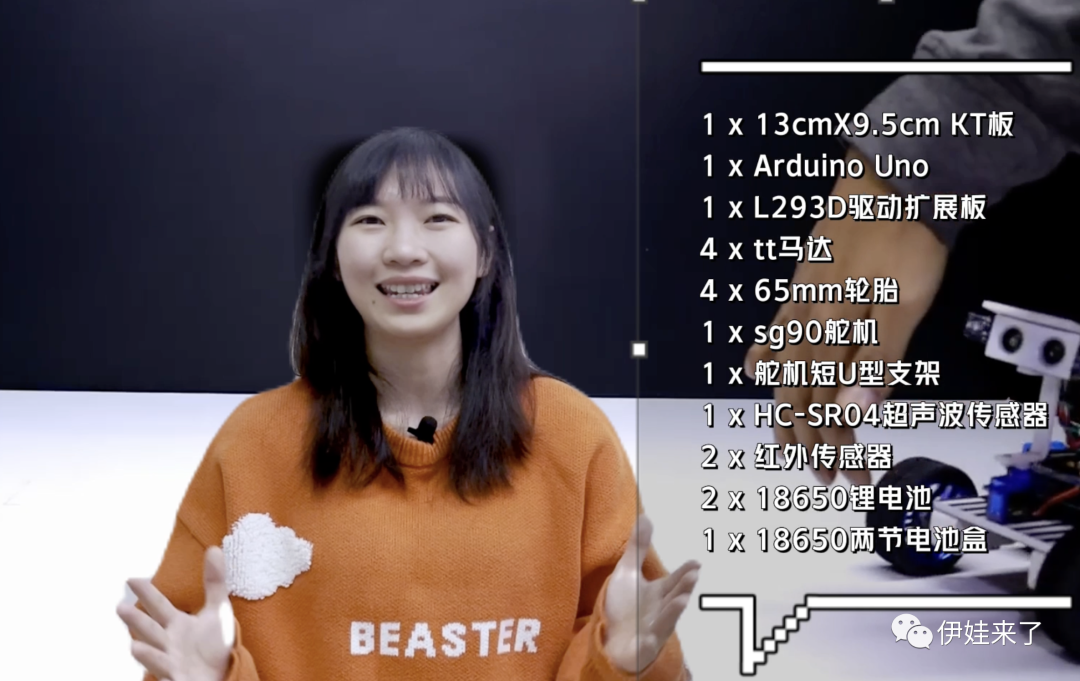
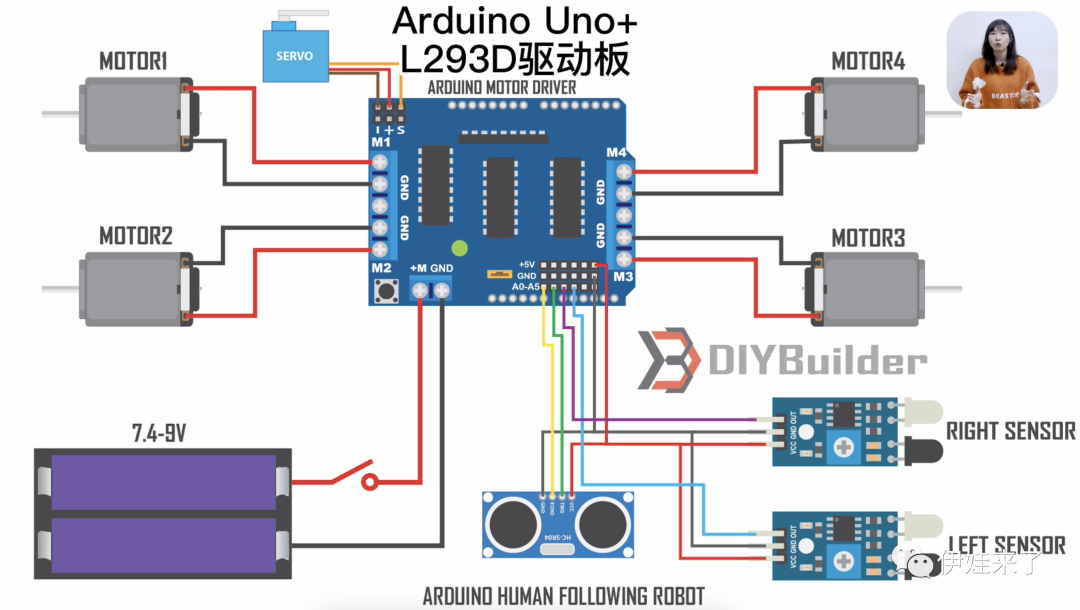
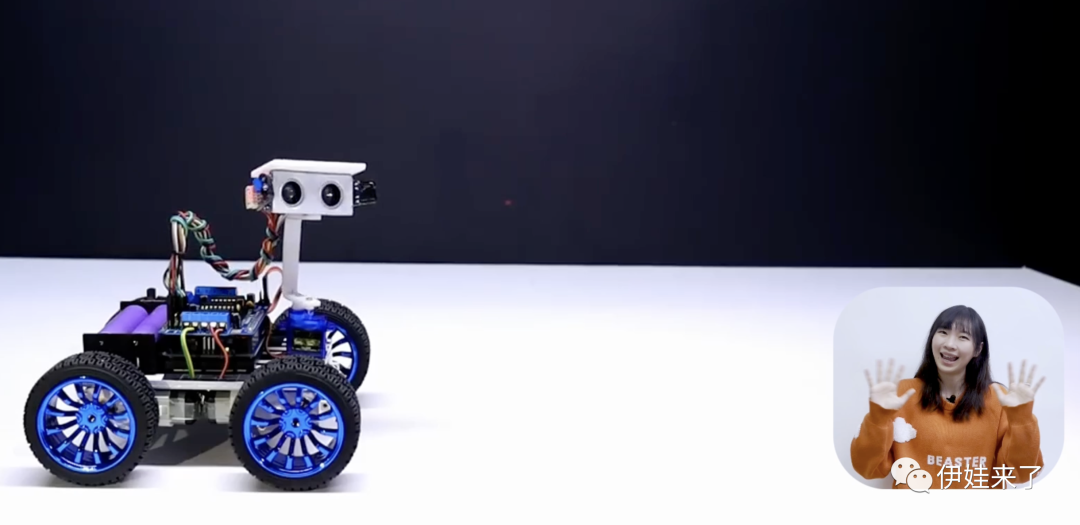
今天分享一个油管上DIYBuilder这个频道的机器人,我叫他瓦力原型机,大家学会了之后,就可以拥有一个属于自己的小瓦力啦,材料费用在100元左右,这次制作使用的是ArduinoUno板,搭配一个L293D的驱动扩展板,4个tt马达、一个sg90舵机,1个HC-SR04的超声波,两个红外传感器,2个18650串联的锂电池。
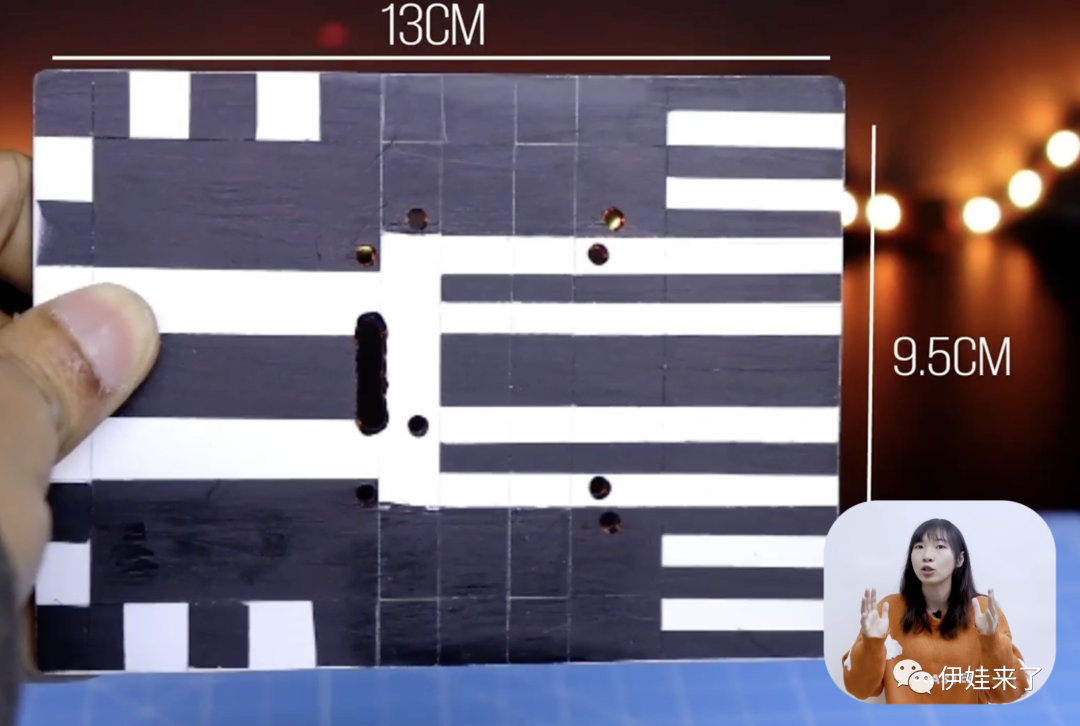
首先把4个马达都焊接上电线,这里很细致用颜色区隔开前后轮的马达以及正负极,机器人的底座用的是13厘米跟9.5厘米的KT板。
这里我用PS帮大家画了一张一样比例的图,需要的后台回复“瓦力”。
温馨提示!

在选择tt马达跟轮子的时候,可以选跟车轴配套的轮子,也可以像这里自己搭配个炫彩蓝轮胎,记得用联轴器就可以,在联轴器锁上螺丝就安装后轮胎了。

连接上马达,朝前的方向安装舵机,跟一个短U型支架,接着把超声波传感器跟一个挖了两个眼睛洞的KT板粘在一起,目的是为了更好的在超声波传感器左右再粘上红外线传感器,这样超声波负责看前面,红外线负责左右边,粘上个小板子,应该是为了限制超声波的范围,让它只侦测前方距离。

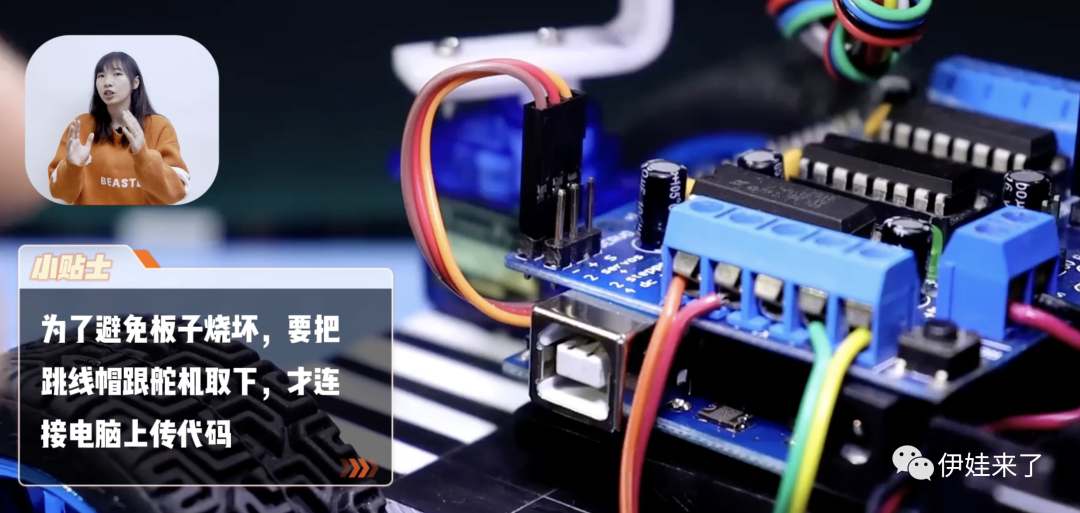
这一步非常重要,取下跳线帽、拔下舵机线,才上传代码,不然的话板子容易烧坏,上传完之后再把舵机接回去,跳线帽放上,安装电池
快跟你的小瓦力一起玩吧!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31691浏览量
224632 -
DIY
+关注
关注
176文章
900浏览量
360571 -
Arduino
+关注
关注
191文章
6535浏览量
197714 -
18650
+关注
关注
4文章
60浏览量
18633 -
瓦力机器人
+关注
关注
0文章
2浏览量
6179
发布评论请先 登录
相关推荐
热点推荐
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
你有没有好奇过:机器人是怎么做到像人手那样精细装配零件的?人形机器人又为什么能稳稳捏住一颗鸡蛋,却不会把它捏碎?
答案其实藏在一个小小的“秘
发表于 04-29 16:29
基于米尔RK3576核心板的国产割草机器人解决方案
TOPS端侧算力、工业级可靠性以及完善的国产软件生态 ,为国产割草机器人提供了一颗强劲、安全、可控的“中国芯”。
此外,基于米尔RK3576核心板还可以应用以下
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外
发表于 04-17 17:27
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
、芯片封装、功率模块的关键支撑;而低温烧结银正从实验室走向机器人、新能源、第三代半导体等产业核心,成为高端电子互连的 隐形推手。
一、春晚四家机器人:幕后推手与技术硬核
1 四家机器人
发表于 02-17 14:07
稚晖君发布全球最小全身力控人形机器人,上纬启元开启个人机器人时代
12月31日,全球首款全身力控小尺寸人形机器人“启元Q1”正式发布。上纬新材董事长彭志辉(稚晖君)宣布,公司将以“上纬启元”品牌进军个人机器人
你好,我是StackChan,超可爱的社区共创开源AI桌面机器人!
搭子。这是一个由全球开发者社区共同孕育、充满温度的生命体。现在,M5Stack正式将这款集可爱、开源与智能于一体的机器人带到你的面前。它不仅

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度机器人控制”场景中
发表于 11-14 15:48
机器人看点:智元机器人公司完成股改 湃特纳机器人完成数千万元A轮融资
给大家带来一些机器人行业的消息: 智元机器人公司完成股改 智元机器人上市在即?据企查查APP信息
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
,已经成为机器人开发者不容忽视的核心处理器。而米尔电子的MYD-LR3576开发板,则以其丰富的接口、稳定的性能和成熟的软硬件支持,为快速原型验证和产品开发提供了绝佳的平台。如果您正在寻找一款能够同时处理复杂视觉任务和丰富交互界
发表于 10-29 16:41
如何为100Tops机器人“退烧”?世强芯片热管理方案,释放100%算力!
机器人进化的速度越来越快。我们总关注机器人的智能与敏捷,却常忽略一个关键的制约因素——散热。对机器人来说,无论是核心处理器的算
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
地磁基准的惯性导航系统可持续提供可靠数据。实测显示,搭载昆泰芯 KTM59 系列融合磁传感器的机器人,在复杂动态环境中定位可靠性达 99.7%,较单一传感器方案提升 27%。
磁传感器芯片的技术突破
发表于 08-26 10:02
如何用Arduino Nano/UNO R3开发板给另一个Arduino IDE不能下载的Arduino Nano/UNO R3开发板重新烧录引导程序bootlaoder
本文介绍了如何用能够Arduino IDE下载的Arduino Nano/UNO R3开发板给另一个Ar
工业机器人的特点
是实现工业互联网的基础,也是第一步。
三大优势:提高产品品质、提高产出、适用范围广
机器人在生产上的优势可以分为提高产品品质、提高产出以及适用范围广三个方面。提高产品品质
工业机器人的
发表于 07-26 11:22



评论