 控制器软件之速度控制功能设计
控制器软件之速度控制功能设计

速度控制和扭矩控制一样,是车辆控制的必须功能,如驻波时就需要进行速度控制,其设计需满足下面几点:
- 软件应该在10ms周期需求扭矩计算信号整合功能,输入信号为驱动模式、需求扭矩、转速、外部速度环的kpki,扭矩ramp,扭矩最大值和最小值,输出信号为:转速差值、Kp、Ki值,Pi积分限幅值、前馈扭矩值、扭矩Ramp、需求扭矩的上下限值。
- 能根据模式请求是否为自标定模式切换需求扭矩及扭矩Ramp值,当模式请求为自标定时,使用状态机给定的自标定扭矩及扭矩Ramp;反之,则使用CAN上的需求扭矩和扭矩Ramp值。
- 能根据模式请求是否为外部速度环切换速度环时的Kp值;若为外部速度环模式,则使用外部速度环的Kp值,反之使用内部Kp值;Kp、Ki值可以通过转速差值查表获得。
- 能根据模式请求进行模式切换,若需求为扭矩环时,输出前馈扭矩为需求扭矩值,其他用以PI计算的值全为0;若需求模式为速度环时,输出前馈扭矩为需求扭矩,PI计算参数为查表获取的Kp、Ki值,以及设定的积分限幅值;若需求模式为其他模式,则输出的所有PI参数为0且前馈扭矩为0。
- 软件应该在10ms周期加入需求扭矩计算功能,输入信号为转速差值、速度环Kp、Ki值、积分限幅值、前馈扭矩值,输出不加damping不加Ramp的扭矩需求值。
- 该模块应能通过增量式PI的模式计算转速控制的需求扭矩,并通过积分限幅值对积分进行限幅。
1 功能描述
1.1 信号整合模块
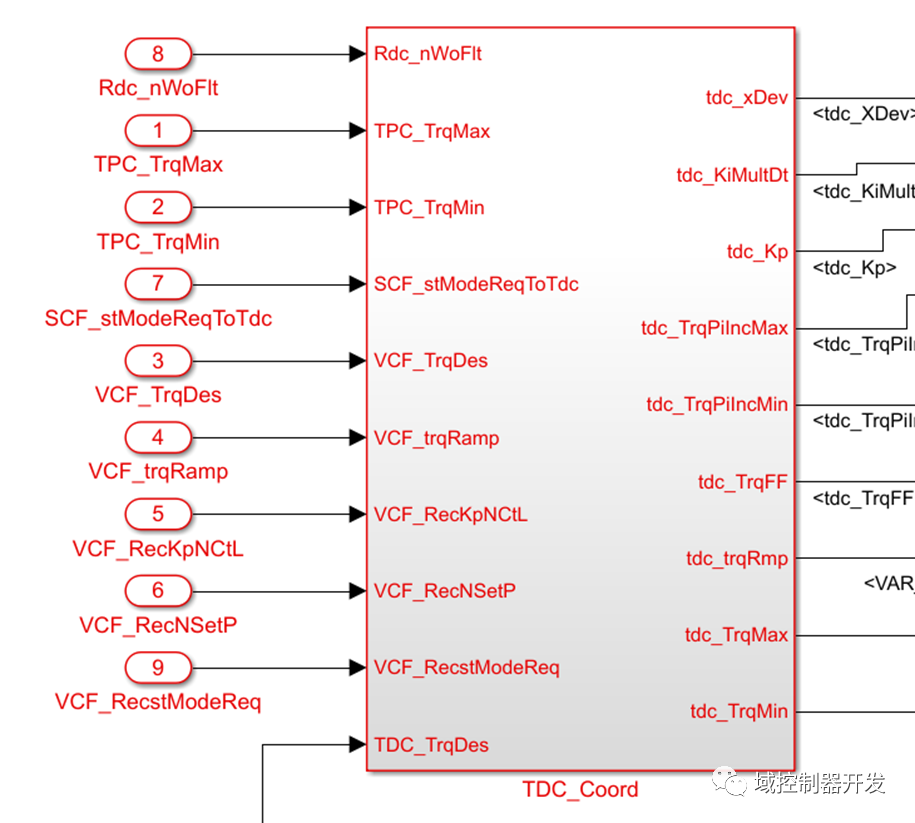
图1.信号整合
该模块内主要分两个子系统,第一部分主要是对输入信号进行前处理:
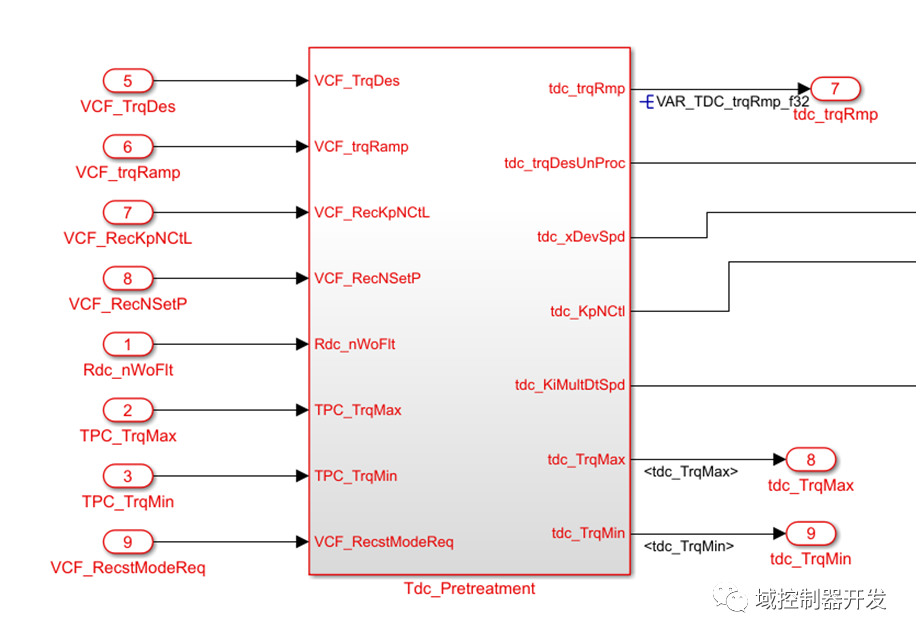
图2.信号前处理
第二部分是根据当前模式选择参数,模型框架如下图:
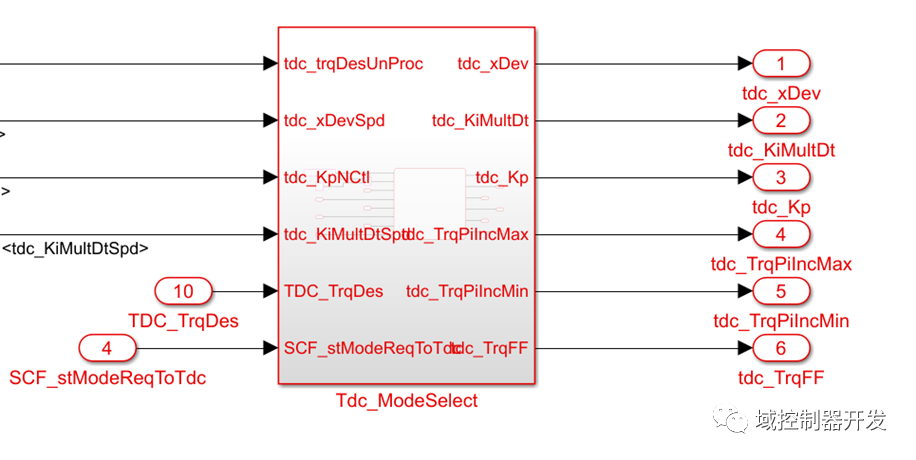
图3.参数选择模块
第一部分内部逻辑如下所示模型框图:
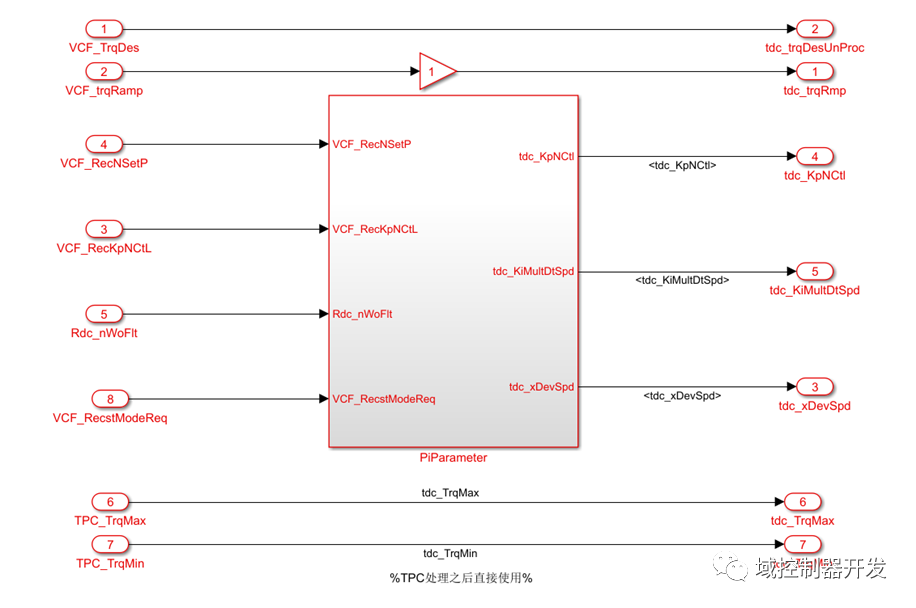
图4.信号前处理内部
从上图可知:
该子系统主要是PI参数选择模块,如下:
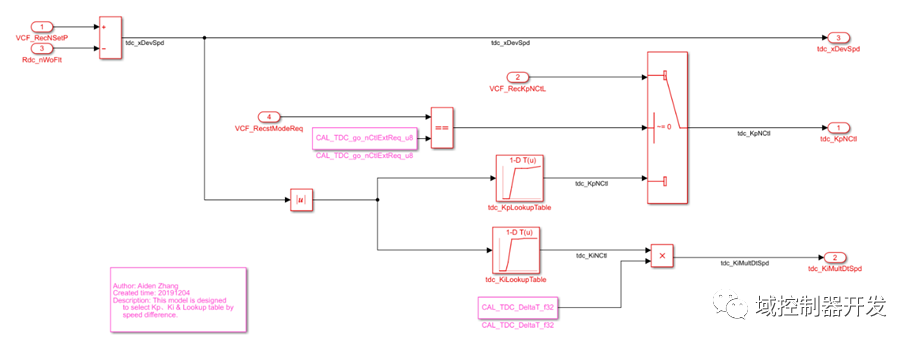
图5.参数选择内部结构
对于PI参数选择模块则为通过当前驱动控制模式请求是不是为外部速度环,若为外部速度环则使用外部的Kp值,当使用外部Kp值时,需通过需求转速与实际转速的差值tdc_xDevSpd判断使用快速的Kp值CSD_RecKpHighNCtL还是慢速的Kp值CSD_RecKpLowNCtL,当转速差值绝对值大于3000时,使用快速Kp值,反之,使用慢速Kp值;若为内部速度环则直接使用内部查表的Kp、Ki值,其中Kp、Ki通过转速差值查表得到。
1.2 速度环需求扭矩计算
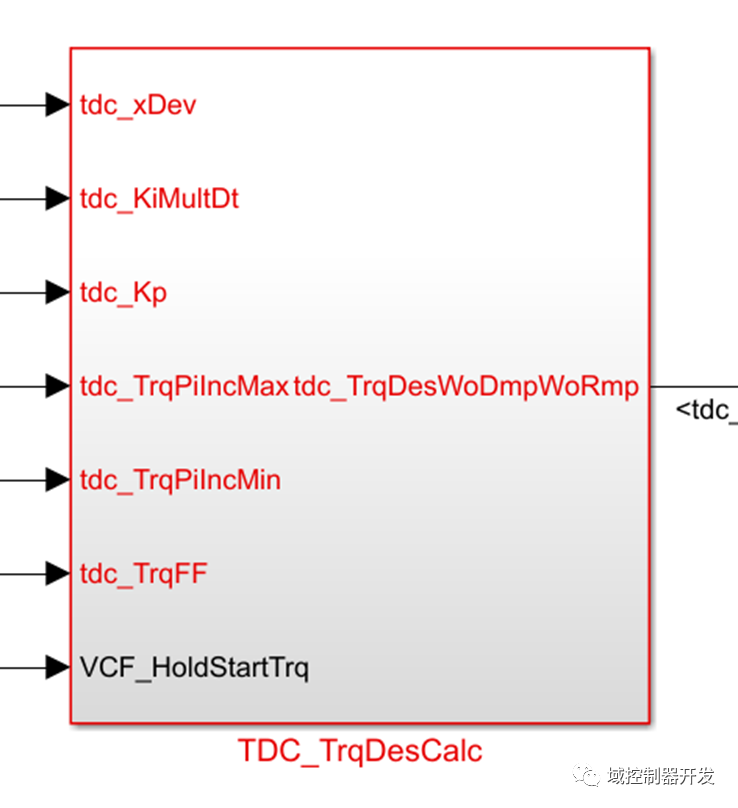
图6.需求扭矩PI计算模块
该模块主要是是用以计算速度环时的需求扭矩,该PI为增量式PI,通过增量式PI计算转速环时的扭矩,并对积分扭矩进行积分限幅防止积分饱和,其中前馈扭矩可以在模式切换时防止扭矩跳变,起到扭矩平滑过渡的目的。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN总线
+关注
关注
146文章
2050浏览量
135478 -
状态机
+关注
关注
2文章
501浏览量
29323 -
CSD
+关注
关注
0文章
96浏览量
13557 -
速度控制
+关注
关注
0文章
38浏览量
8287
发布评论请先 登录
相关推荐
热点推荐
BACnet控制器有什么功能?
描述BACnet协议的体系结构,分析BACnet控制器的功能,论证基于嵌入式Linux开发BACnet控制器的可行性;给出BACnet控制器软件
发表于 09-20 08:07
基于嵌入式Linux 的BACnet 控制器软件设计
描述BACnet协议的体系结构,分析BACnet控制器的功能,论证基于嵌入式Linux开发BACnet控制器的可行性; 给出BACnet 控制器软件
发表于 05-15 14:55
•28次下载
基于微控制器的多功能电动机保护装置实现
开发了一种基于微控制器的多功能 电动机保护 装置。在接触器线圈控制电压优化设计和电子式热继电器保护功能设计的基础上,将两种
发表于 08-09 17:19
•45次下载
嵌入式运动控制器设计
uC/OS-Ⅱ。详述了控制器的功能设计、硬件设计和软件设计流程。截至目前,运动控制器硬件平台搭建均已完成,并进行了通信实验和基于SCARA机器人平台的
发表于 02-08 17:22
•2次下载
控制器的功能
本视频主要介绍了控制器的功能,分别有数据缓冲、差错控制、数据交换、状态说明、接收和识别命令、地址识别,其次介绍了DMA控制器基本功能,最后介
伺服控制器速度开环和速度闭环区别
随着公司低压直流伺服电机控制器的销量增加,客户反馈伺服控制器速度开环和速度闭环区别不是很明白,现对客户反馈的速度闭环问题汇总整理及解决方案如
发表于 09-08 09:16
•3244次阅读

凌华科技基于软件控制的EtherCAT运动控制器
SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动

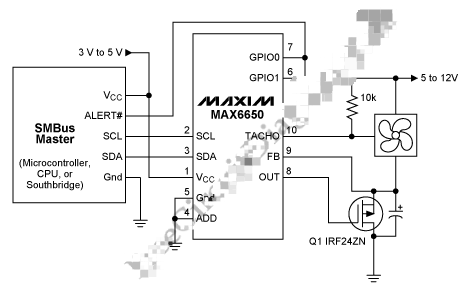
风扇速度控制器电路图分享
风扇速度控制器是一种电子设备,用于调节风扇的转速。通过改变输入电压或电流,风扇速度控制器可以控制风扇电动机的功率,从而调节风扇的转速。



评论