 工业机器人的组成、分类及其工作原理分别是什么?
工业机器人的组成、分类及其工作原理分别是什么?

一、工业机器人组成
工业机器人主要由主体、驱动系统和控制系统三个基本部分组成。
主体 – 即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3-6个运动自由度,其中腕部通常有1-3个运动自由度;

驱动系统 – 包括动力装置和传动机构,核心为减速器以及伺服电机,用以使执行机构产生相应的动作;
控制系统 – 是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
二、工业机器人分类
关于工业机器人的分类,国际上没有指定统一的标准,可按负载重量、控制方式、自由度、结构、应用领域等划分。
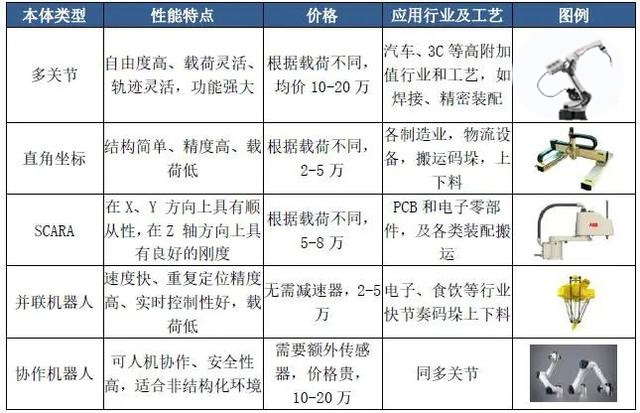
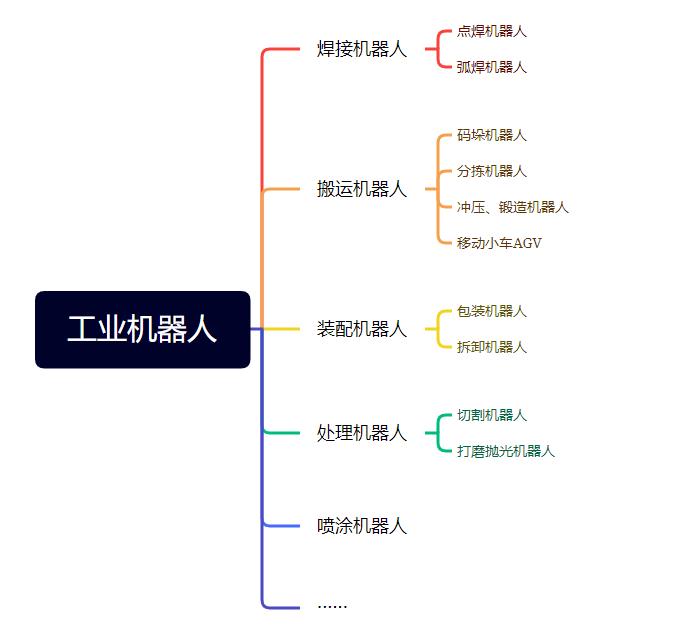
按照结构形态分类如下:
按照应用分类可以分为:焊接机器人、切割机器人、喷涂机器人、搬运机器人、装配机器人、打磨机器人。
三、工业机器人工作原理
机器人的工作原理是一个比较复杂的问题。简单地说,机器人的原理就是模仿人的各种肢体动作、思维方式和控制决策能力。
从控制的角度,机器人可以通过如下四种方式来达到这一目标。
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。江苏无锡专业工业机器人集成商,金红鹰生产的机器人所用的工作方式多为示教再现和编程控制两种,市场上大多数工业机器人都是按照这两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
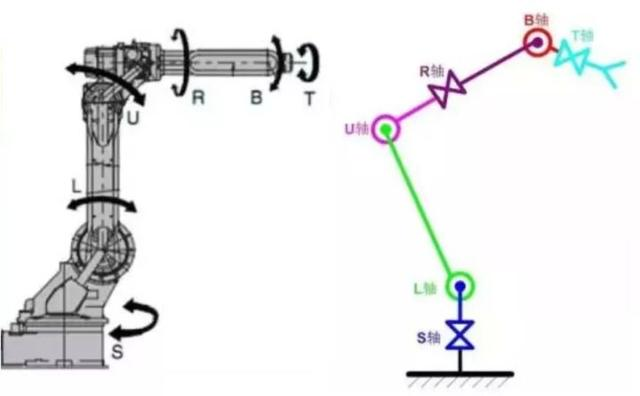
以六轴垂直多关节机器人为例(如下图),通过机器人控制器及其控制系统,可实现S轴回旋,L轴下臂倾动,U轴上臂倾动,R轴手臂横摆,B轴手腕俯仰以及T轴的手腕回旋,实现六个轴的动作操作与配合。
审核编辑黄宇
-
机器人
+关注
关注
213文章
31494浏览量
223798
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
工业机器人TOP1,切入人形机器人赛道,意欲何为?

探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性

工业机器人的智能之选:永铭电容器解锁性能潜能

机器人关节模组:类型、设计、工作原理及应用

工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

机器人通信的贴身翻译,PROFINET转Ethercat网关的高能玩法
工业机器人的特点
工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
工业机器人与协作机器人概念不同




评论