 可食用!您胃中的机器人和AI
可食用!您胃中的机器人和AI

这篇文章来源于DevicePlus.com英语网站的翻译稿。
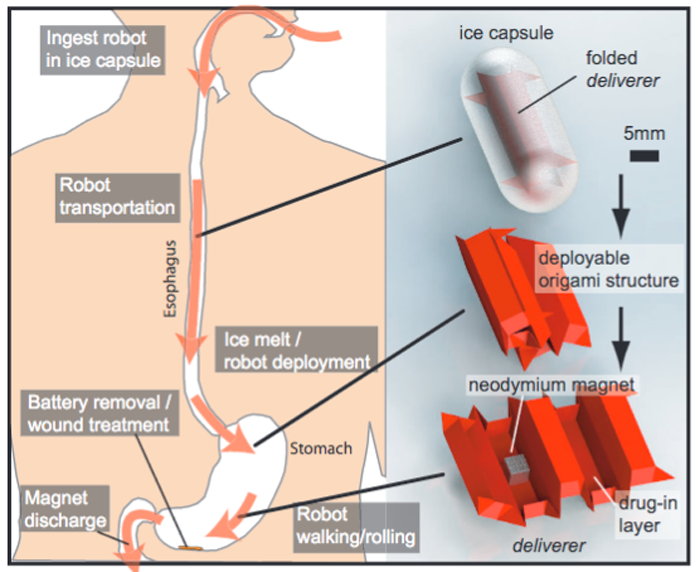
可食用折叠机器人胶囊以及可展开折叠装置;照片:Melanie Gonick/MIT
MIT、谢菲尔德大学和东京工业大学的研究人员在医疗机器人领域实现技术创新,合作研发出了一种可食用折叠机器人。该机器人经过患者消化道时可以实现远程控制。
MIT计算机科学与人工智能实验室(CSAIL)教授Daniela Rus博士表示,“最大的挑战是如何构建一种临床安全且有能力的医疗机器人。解决这个问题需要寻找生物相容性材料、安全的体内运输方式、将机器人从药丸形状重新展开的方法,以及对机器人位置和功能的精确多模式控制。”
可食用折叠机器人概述
首先,将机器人折叠成折纸形状,然后将其装入27mm的冰囊中,让患者服用。机器人药丸穿过食道和胃之后,周围的冰融化。
研发人员凭借超声波、X射线和霍尔效应传感器的组合对机器人进行地理定位。
机器人在这里展开。折叠机器人的运动方式有多种:基于摩擦的推进(折叠形状造成的结果);胃液的水基推进;以及磁场轨迹控制。
White Rose研究论文,利兹大学,Sheffield & York
机器人的三种运动方式
第一种运动是使用磁力。折叠机器人的一块褶皱板内嵌了一个长3.2mm的钕磁铁。该磁铁能够对体外磁场做出反应,因此研发人员可以操纵机器人的轨迹。
遥控操纵杆能够产生旋转磁力,快速旋转可以使机器人旋转到位,但较慢的旋转会让机器人绕其中一个固定脚旋转。
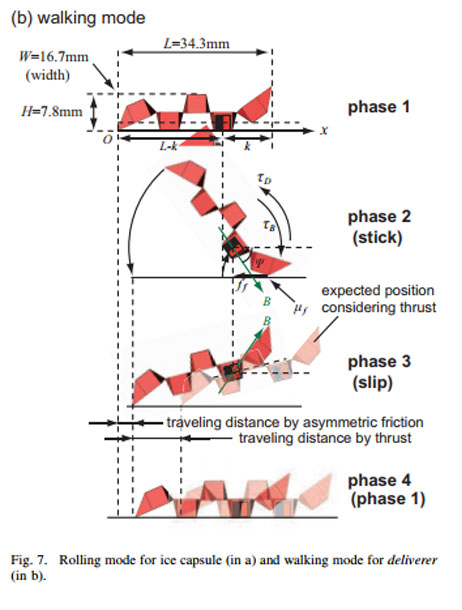
第二种运动就是研究人员所说的“粘滑”运动。褶皱板的形状和结构使得这种运动成为可能。机器人的边缘通过摩擦力附着在一个表面上,当其身体弯曲时,由于重量分布发生变化,机器人会自由滑动。
比如, “磁场施加在传送器被驱动的方向上(图中正x方向),在四个角度(Ψ, Ψ/2, −Ψ/2和−Ψ;Ψ=1.1弧度是从水平面的角度)上振荡,频率为5Hz。施加这种交替磁场时,由于推力、前后形状造成的不对称摩擦力和自身不对称质量平衡等因素的组合作用,输送者可以“向前行走”。”
研究人员估计,机器人80%的动作利用这种粘滑推进力,其余20%利用来自胃液中的水推进力。“因此,机身设计我们积极采用鳍片的概念和特征,您可以从相对扁平的设计中看出来,”研究团队成员Shuhei Miyashita说道。
胃内的“粘滑”运动
可食用折叠机器人的材料与机械学
该设备的功能与其形式和材料有着直接关系。
这些材料不仅需要具有生物相容性,还需要具有足够的结构完整性和刚度。材料必须能够容纳折叠褶皱,同时还要足够刚性以产生粘滑运动所需的摩擦力。
最终,他们发现一种用做香肠肠衣的干猪肠材料非常成功。研究员李曙光说:“我们花了很多时间在亚洲市场和唐人街市场寻找材料。”整体结构由三层组成:顶部和底部各一层外壳,中间包裹着一层生物鳍片(Biolefin)——一种可生物降解的收缩包装,在加热时会收缩。
然后通过一系列仅穿透外层的浅缝产生折叠模式。比如,当仅在顶层制作一个切口时,中间层会收缩,并且将向下朝向底层折叠。
将机器人制作成可以吞下的小形状很重要,然而折叠机器人展开的方式同样重要。机器人设计需要利用作用在机器人上的胃力使得机器人自己展开。
为了实现正确的结构和形状,研究团队通过多次试验,最终获得了一种矩形形状,且沿着短轴方向伸出折叠褶皱,同时角折进去,以便让机器人增加牵引力。
可食用机器人的医疗应用
研究团队表示,美国每年约有3500名人吞下电池,该设备可以用来取出卡在消化道中的电池。为了取出卡在人体器官中的电池,研究小组利用机器人的嵌入式磁铁将电池与胃壁分开,并将其带到体外。
该团队表示,该技术的未来潜在应用包括:修复伤口;将药物运送到目标位置;或从体内移除其他类型的异物等。
该机器人的最初原型于2016年开发,截至2017年仍然无法适用于人类。Rus 表示, “通常,完成体内实验并获得批准需要三年时间。从动物到人类可能还需要三年时间。成功治疗人类可能至少需要六年时间。”
然而,这种可食用折叠机器人并不是折叠医疗机器人的唯一成果。哈佛医疗团队正在研究类似方法,但是研发出的医疗折叠机器人却完全不同。
以下视频展示了MIT团队的上一版折叠机器人如何为最新模型夯实基础。
医疗机器人技术是个好主意吗?
医疗保健微型机器人技术的概念并不新鲜。事实上,20世纪60年代的一部科幻电影神奇旅程就已经预示了纳米机器人在身体血管内进行微型冒险以去除凝块的潜力。然而,对于许多机器人医疗设备,比如植入式起搏器和除颤器,人们真正担心的是黑客获取医疗设备的访问权限。
诸如胃折叠机器人的医疗保健机器人的风险因素要低得多,因为它们只是暂时停留在你的体内。与手术或其他侵入性医疗程序相比,这些胃机器人装置的影响要小得多。
此外,这些设备并不具备互联网功能,目前依赖于材料、摩擦、磁性和有效传输系统的相对低保真机制。这种简单性使其成为强大的原型。
苏黎世联邦理工学院机器人学教授Bradley Nelson表示:“这个概念具有高度创造性和高度实用性,以巧妙的方式满足了临床需求。这是我见过的最有说服力的折叠机器人应用之一。”
订阅 Device Plus,了解更多创新技术。

DevicePlus 编辑团队
设备升级版适用于所有热爱电子和机电一体化的人。
审核编辑黄宇
-
机器人
+关注
关注
213文章
31432浏览量
223612 -
AI
+关注
关注
91文章
41060浏览量
302569
发布评论请先 登录
杰和科技亮相机器人大会,边缘AI驱动机器人场景落地

机器人成群结队亮相NVIDIA GTC 2026
基于NVIDIA模组与软件套件推动边缘与机器人AI推理
《AI机器人控制进阶教程(入门版)》阅读指引

探索RISC-V在机器人领域的潜力
NVIDIA推出面向语言、机器人和生物学的全新开源AI技术
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
科普 | 英伟达“最强”机器人大脑平台与5G物联网完成验证测试,RedCap支持人形机器人高效连接

基于 NVIDIA Blackwell 的 Jetson Thor 现已发售,加速通用机器人时代的到来
NVIDIA携手合作伙伴亮相2025世界机器人大会
安达发 传统排产已过时?AI机器人+APS高级排产软件重塑制造业!
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI

机器人和自动化的未来(2)




评论