 浅析拆卸KUKA机器人2轴平衡配重V1
浅析拆卸KUKA机器人2轴平衡配重V1

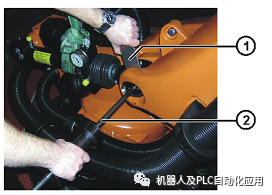
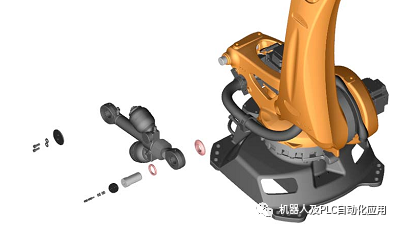
沿正向移动机器人,使间隔块落位于活塞杆上。
2. 将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。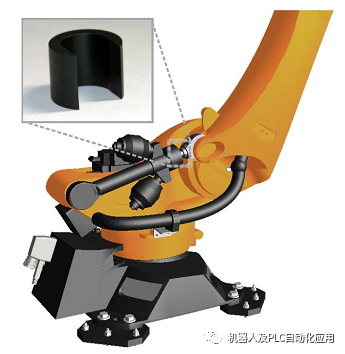

1.波纹管
2.蜗杆传动夹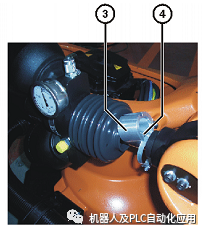
3夹紧衬套4活塞杆
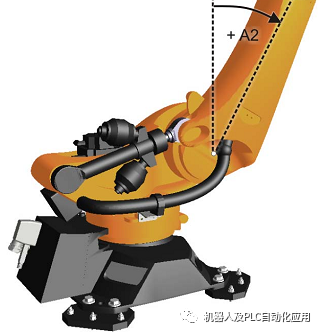
3. 将大臂小心地往负向移动,直到间隔块直着固定好。
4. 用合适的设备 (如起重机)固定平衡配重。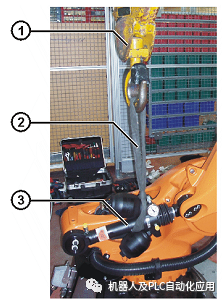
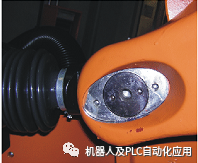
5. 拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.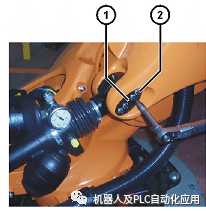

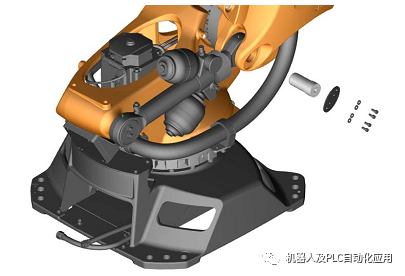
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。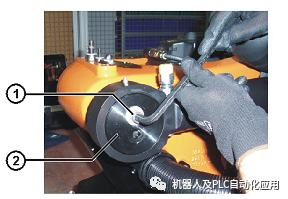
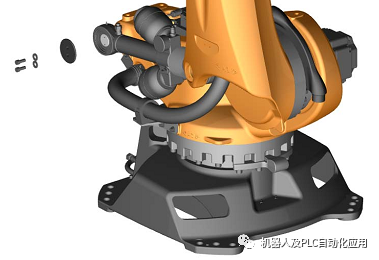
7. 将平衡配重往上抬起。其间取下止推垫圈和定距环。

8. 将平衡配重放在一块合适的垫子上。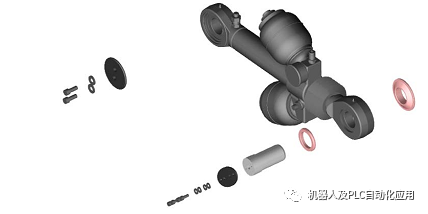


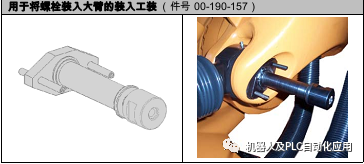
拧入2个螺纹嵌件螺栓。 将前平衡系统销紧固至平衡系统销的安装/拆卸装置,将安装/拆卸装置的固定螺钉插入前平衡系统销的外螺纹孔中。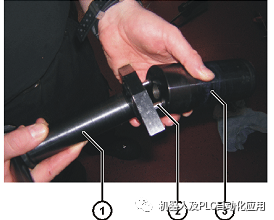
将冲击心轴插入安装/拆卸装置的手柄,并将其拧到前平衡系统销上。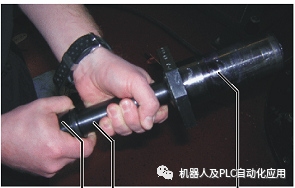
用木槌轻敲冲击心轴,敲入前平衡系统销。

安装固定板并用4个新的M8x20-10.9内六角螺钉和锥形弹簧垫圈紧固,MA=23.0 Nm。
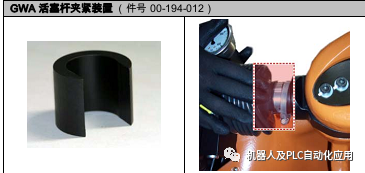
沿正方向移动连杆臂,直到松开气缸和铰接头之间的夹紧衬套,然后拆下夹紧衬套

所需的专用工具:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31437浏览量
223618
原文标题:拆卸KUKA机器人2轴平衡配重V1
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
。有了扭矩传感器,机器人能实时检测力的大小和方向,自动调整姿态。例如,在人形机器人的腿部关节,传感器以1千赫兹的频率感知地面反作用力,瞬间调整输出扭矩,实现稳定行走和上下斜坡。2. 安
发表于 04-17 17:27
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
未来》和《立上游》:**MagicBot Z1/Gen1+MagicDog 四足,集群伴舞、多机协同,主打快速响应+低延迟+高集成。
**松延动力:《奶奶的最爱》:**E1/N2/Bu
发表于 02-17 14:07
工业机器人TOP1,切入人形机器人赛道,意欲何为?
电子发烧友原创 工业机器人作为推动全球制造业转型的关键驱动力,近年来取得了飞速的发展。据MIR DATABANK最新数据统计,2025年Q1,中国工业机器人整体市场销量同比增长11.6%,国产

探索RISC-V在机器人领域的潜力
探索RISC-V在机器人领域的潜力
测评人:洄溯
测评时间: 2025年11月
测评对象: MUSE Pi Pro开发板(基于进迭时空K1系列高性能RISC-
发表于 12-03 14:40
保持平衡及运动控制:人形机器人 IMU 芯片推荐
,IMU 是一种测量物体三轴角速度和加速度的设备,通常包含三个单轴加速度计和三个单轴陀螺仪,部分产品还集成了磁力计。早期机器人仅搭载 1~2
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
全球80多个国家和地区。近日,大象机器人联合进迭时空推出全球首款RISC-V全栈开源六轴机器臂“myCobot280RISC-V”,为开发者

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
,配备高性能的电机和传动装置,为机器人提供稳定的动力输出。通过精确的电机控制算法,机器人可以实现前进、后退、转弯等各种动作,并且能够根据不同的地面状况和行走需求,灵活调整行走速度和姿态。
平衡与稳定性
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错觉
一直蠢蠢欲动ros2和
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating S
发表于 04-27 11:24
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
全球80多个国家和地区。
近日,大象机器人联合进迭时空推出全球首款RISC-V全栈开源六轴机器臂“myCobot 280 RISC-V”,为
发表于 04-25 17:59



评论