 拆卸KUKA机器人2轴平衡配重步骤
拆卸KUKA机器人2轴平衡配重步骤

沿正向移动机器人,使间隔块落位于活塞杆上。
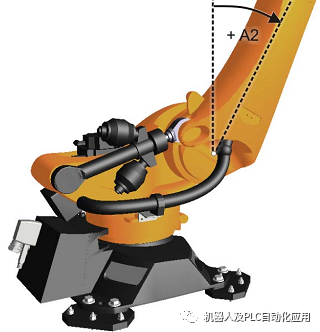
2. 将间隔块置于鱼眼接头与液压缸之间敞露的活塞杆上,为此,将橡胶波纹管往后推。
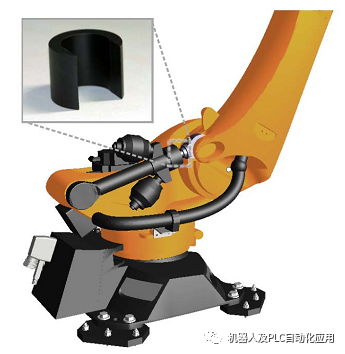
3. 将大臂小心地往负向移动,直到间隔块直着固定好。
4. 用合适的设备 (如起重机)固定平衡配重。
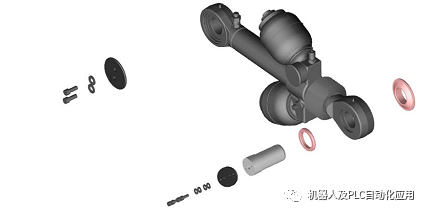
5. 拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.
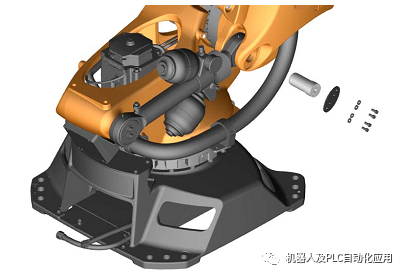
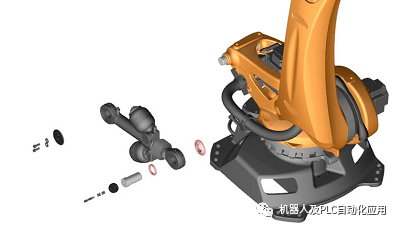
6. 旋出两个内六角螺栓及止动垫圈,取下旋转机体盖板,小心地从旋转机体的螺栓上取下平衡配重。
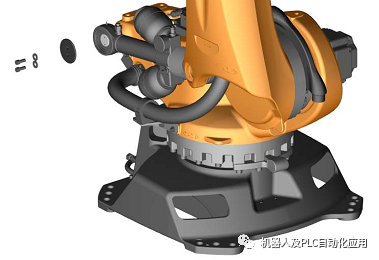
7. 将平衡配重往上抬起。其间取下止推垫圈和定距环。
8. 将平衡配重放在一块合适的垫子上。
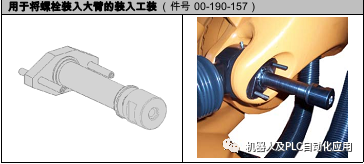
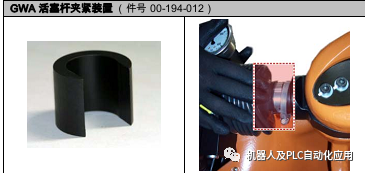
所需的专用工具:
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31434浏览量
223614
原文标题:拆卸KUKA机器人2轴平衡配重
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
工业机器人的末端关节旋转该精确控制?
的布局如下: 传统机器人KR对于KR系列这一类的传统机器人来讲,末端的布局一般按照满足“三轴轴线交于一点”的基本原则来做,主要区别在于三个电机的布置和传动方式。KUKA之前的很多
发表于 11-01 11:08
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
库卡KUKA机器人四种启动方式介绍
机器人先到达BCO安全参考的,然后在按下启动按钮,机器人就可以正常运行程序。 (2)操作步骤 A:编写程序并且调试程序等; B:手动状态选择需要运行的程序; C:手动状态时候上电运行程
发表于 09-04 15:45
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种控制器,其作用类似于
发表于 09-08 16:30
KUKA焊接机器人伺服电机常见故障及维修处理
尽可能避免切削液的飞溅。(2)当库卡机器人伺服电机安装在齿轮箱上时,加注润滑油时应注意齿轮箱的润滑油油面高度必须低于伺服的输出轴,防止润滑油渗入电动机内部。(3)固定库卡机器人伺服电机
发表于 09-26 16:51
库卡机器人MGV电源模块维修
KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模块维修 库卡控制器维修 KUKA电源维修KU
发表于 09-08 07:30
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,这个怎么用啊?如何和kuka机器人建立通讯啊?是Tcp接口吗?
发表于 10-21 20:59
ABB机器人6640机器人平衡缸总装图及拆卸步骤详解
的弹簧发出异响 检查汽缸是否协调 ABB机器人6640机器人平衡缸总装图如下: 拆卸前将机器人二轴摇至零位附近,即通过二
KUKA机器人2轴平衡配重拆卸技巧
将大臂小心地往负向移动,直到间隔块直着固定好。
用合适的设备 (如起重机)固定平衡配重。
拧出四个内六角螺栓及碟形垫圈,并取下止动垫圈。使用拔销器,将螺栓从大臂中拔出.
发表于 07-25 15:24
•2275次阅读
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤
本次内容来简单谈一谈KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤。

库卡KUKA机器人常见故障维修
1、KUKA机器人伺服电机维修过热原因 ①电源电压过高; ②电源电压过低,电机在额定负载下运行,电流过大使线圈发热; ①修理和拆卸线圈时,热拆卸方法不正确,会烧坏铁芯; ①发动机过载或



评论