 ABB机器人6640机器人平衡缸总装图及拆卸步骤详解
ABB机器人6640机器人平衡缸总装图及拆卸步骤详解

检查活塞杆,如果听见啸叫声,则表明轴承有问题,或者进了杂质在里面或者轴承润滑不够了
注意是维修还是升级
检查汽缸是否协调,如果里面的弹簧发出异响
检查汽缸是否协调,如果里面的弹簧发出异响检查汽缸是否协调
ABB机器人6640机器人平衡缸总装图如下:
拆卸前将机器人二轴摇至零位附近,即通过二轴电机齿轮箱上方孔能对准二轴大臂螺纹孔位置即可,并用行吊将机器人固定,如图
将机器人二轴齿轮箱上端的孔位与机器人二轴手臂上的孔位用螺杆锁紧,以防拆卸平衡杠后倾倒,以及方便后续平衡杠的再次安装,如图
3.将平衡杠后端盖板拆开并翻个面重新固定到平衡杠上,分别用四 颗长螺杆及螺帽固定;旋紧螺帽均匀受力,使得平衡缸中间杆微 微冒出表明已受力;
4.将平衡杠与二轴连接处的盖板拿掉(螺丝刀可翘掉),取出中间内六角螺杆,然后用专业工具取出轴承;
5.吊起平衡杠,拆下平衡杠下面的禁锢螺栓即可;
6.装回平衡缸按此逆方法即可
怎么判断平衡杠是否有问题呢?
1.平衡杠是否协调,里面弹簧是否有异响;
2.活塞杆是否有刮擦声,表面是否有刮痕;
3.是否能听到尖啸声;
文章仅表达个人一些经验与大家交流,若有不到之处请大家谅解与指正
责任编辑:xj
原文标题:ABB机器人6640机器人平衡缸拆卸步骤
文章出处:【微信公众号:ABB机器人教程】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31494浏览量
223803 -
ABB机器人
+关注
关注
15文章
93浏览量
31074
原文标题:ABB机器人6640机器人平衡缸拆卸步骤
文章出处:【微信号:RoboticsMission,微信公众号:ABB机器人教程】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
如果把高端机器人比作一个“人”,那么关节扭矩传感器就是遍布全身的“触觉神经”。没有它,机器人就像得了末梢神经麻痹——能按程序动,却感受不到外界的力量,动作僵硬、笨拙,甚至危险。
核心原因:让机
发表于 04-17 17:27
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
**< 5%**。
保障春晚机器人360° 感知、毫米级定位、动态平衡的稳定性。
(3)AI芯片和主控:计算大脑
用于芯片倒装、3D 堆叠、热界面材料TIM,热阻低至0.12**℃・cm
发表于 02-17 14:07
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
模拟输入数据自动调整整个系统的动态平衡,使得机器人最终能够快速且平滑地沿着黑线移动。除此之外,该项目最大的亮点是我根据GD32VF103处理器的库函数手册等相关资料为RV-STAR开发板封装了一个类
发表于 10-20 10:39
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
”具身机器人平台的企业。 此前越疆机器人发布的六足仿生机器狗是集“认知、动作、机动”三大核心能力于一体的创新产品,而且六足架构既具备优于四足结构的稳定性和负载能力。 越疆六足仿生机器狗
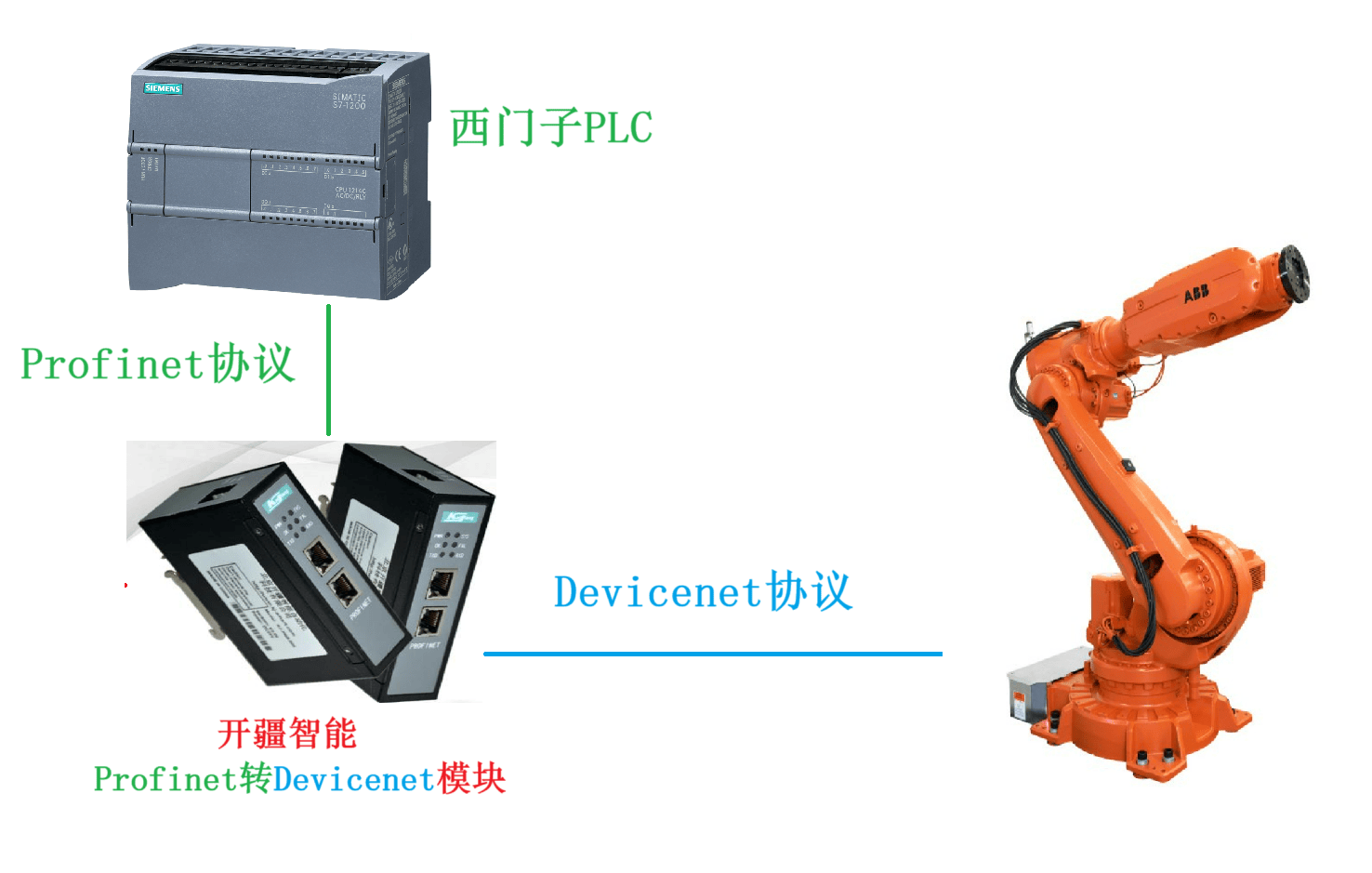
开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
本案例是西门子PLC通过开疆智能研发的Profinet转Devicenet网关连接ABB机器人,网关作为Devicenet从站,ABB机器人作为主站进行通讯。具体
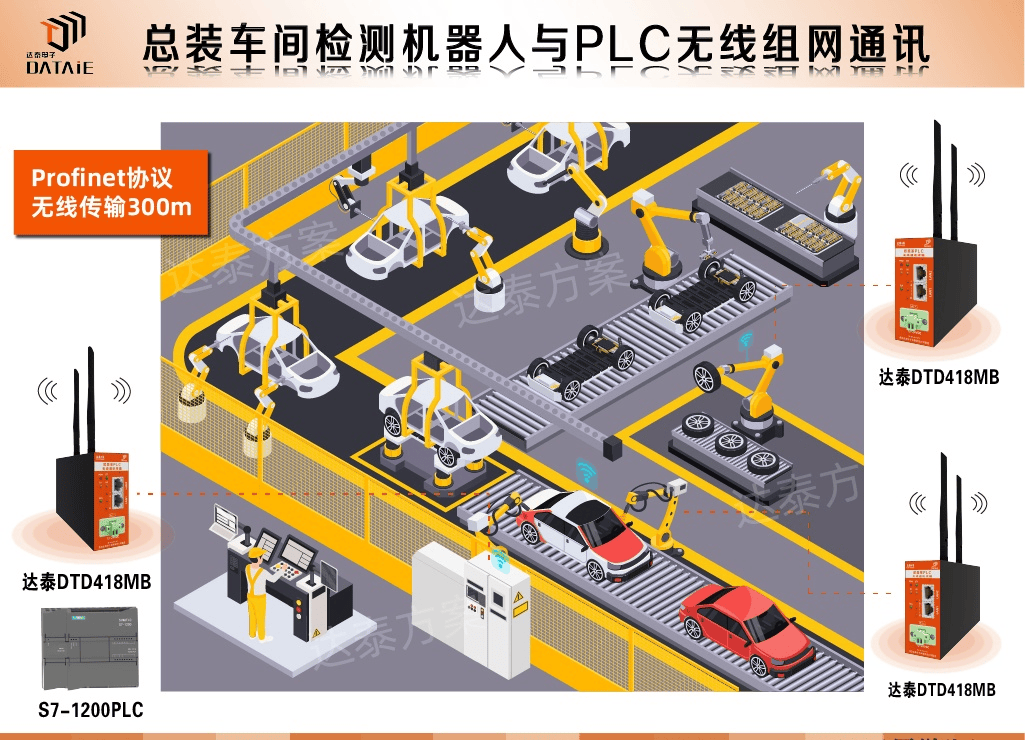
降本增效!汽车总装线PLC-机器人无线改造方案来了
本次项目是位于广州的一家新能源汽车生产线。本次技改对象为 总装车间 工作的 检测机器人 。在汽车生产线的总装车间中,检测机器人扮演着至关重要的角色,其核心作用是通过自动化技术提升车辆制
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例
本案例是通过开疆智能Profinet转ModbusTCP网关将西门子PLC与ABB机器人进行通讯 因西门子PLC采用Profinet协议,而ABB机器人采用的是ModbusTCP通讯。

盘点#机器人开发平台
Athena机器人****开发平台思岚推出Athena机器人开发平台,有望主导机器人开发平台未来市场-电子发烧友网AUTO CUBEROS机器人开发平台AUTO CUBEROS
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
,配备高性能的电机和传动装置,为机器人提供稳定的动力输出。通过精确的电机控制算法,机器人可以实现前进、后退、转弯等各种动作,并且能够根据不同的地面状况和行走需求,灵活调整行走速度和姿态。
平衡与稳定性
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和自主导航的核心技术有了更深入的理解。以下是我的心得体会
发表于 05-03 19:41



评论