 PLC经典实例:简易机械手的PLC控制线路与程序详解
PLC经典实例:简易机械手的PLC控制线路与程序详解

一、系统控制要求
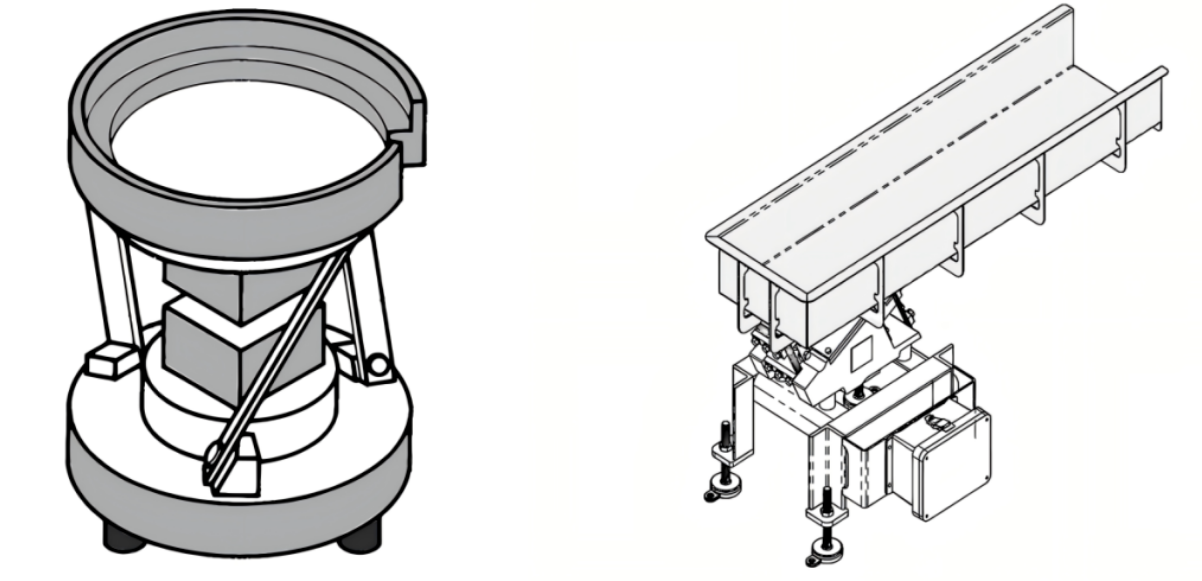
简易机械手的结构如图5-9所示。M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧、放松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关,SQ5为工件检测开关。
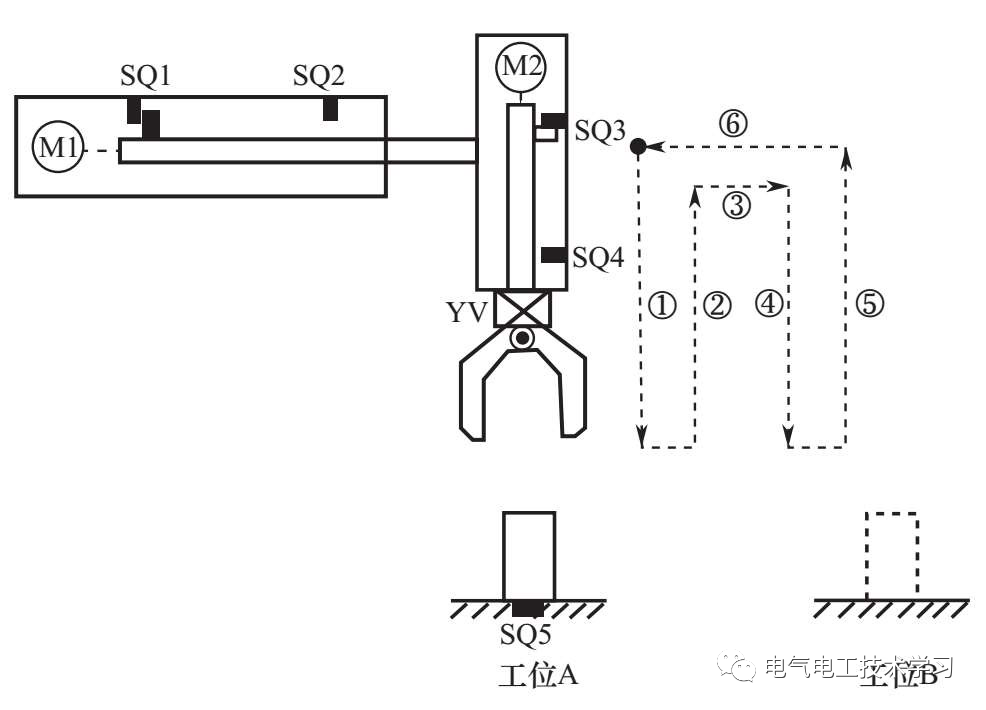
图5-9 简易机械手的结构
简易机械手控制要求如下:
①机械手要将工件从工位A移到工位B处。
②机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQI、SQ3均闭合。
③若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,则机械手按“原点→下降→夹紧→上升→右移→下降→放松→上升→左移→原点”步骤工作。
确定输入/输出设备,并为其分配合的I/O端子
简易机械手控制采用的输入/输出设备和对应的PLC端子见表5-3。
表5-3 简易机械手控制采用的输入/输出设备和对应的PLC端子

二、绘制控制线路图
图5-10所示为简易机械手的PLC控制线路图。
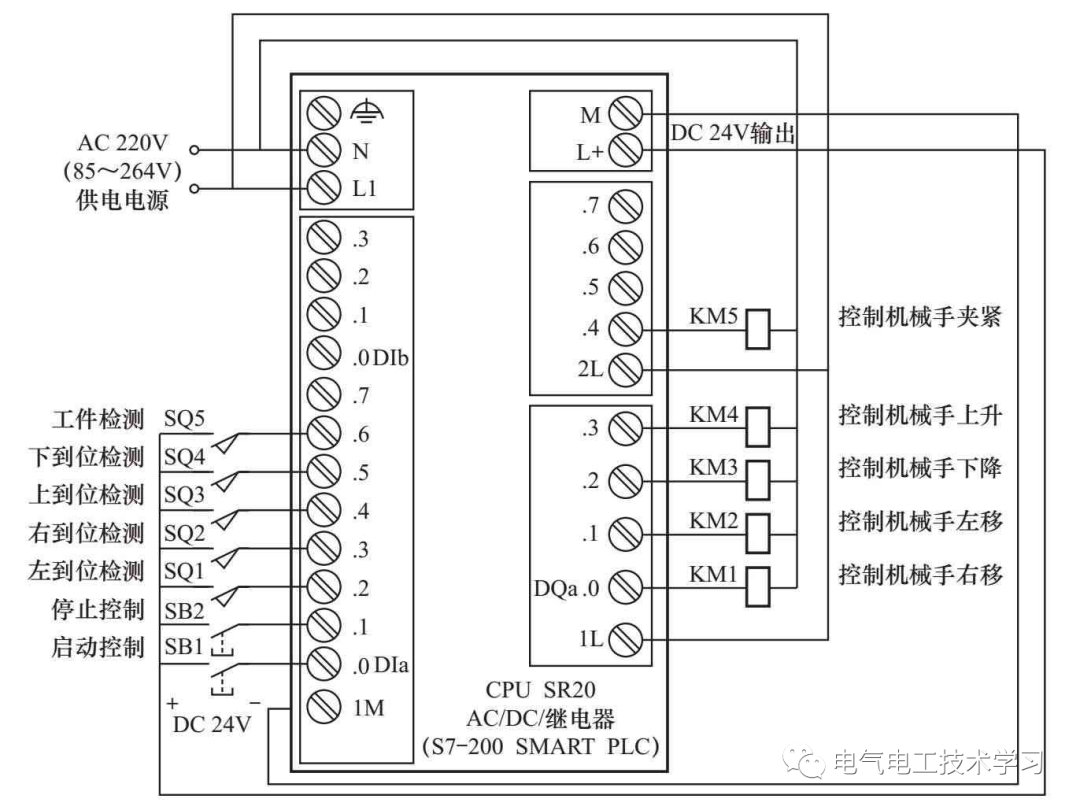
图5-10 简易机械手的PLC控制线路图
三、编写PLC控制程序
1)绘制状态转移图图5-11所示为简易机械手控制状态转移图。
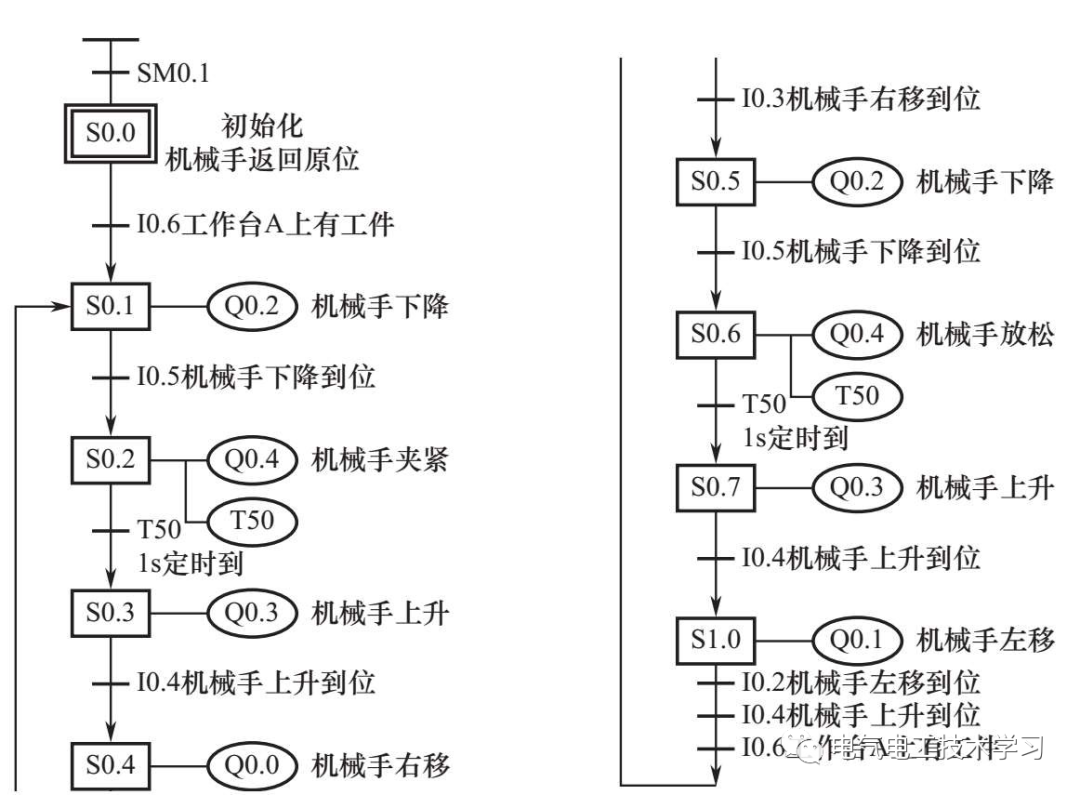
I0.3机械手右图移5-到11位 简易机械手控制状态转移图
2)绘制梯形图
启动编程软件,按照图5-11所示的状态转移图编写梯形图程序,如图5-12所示。
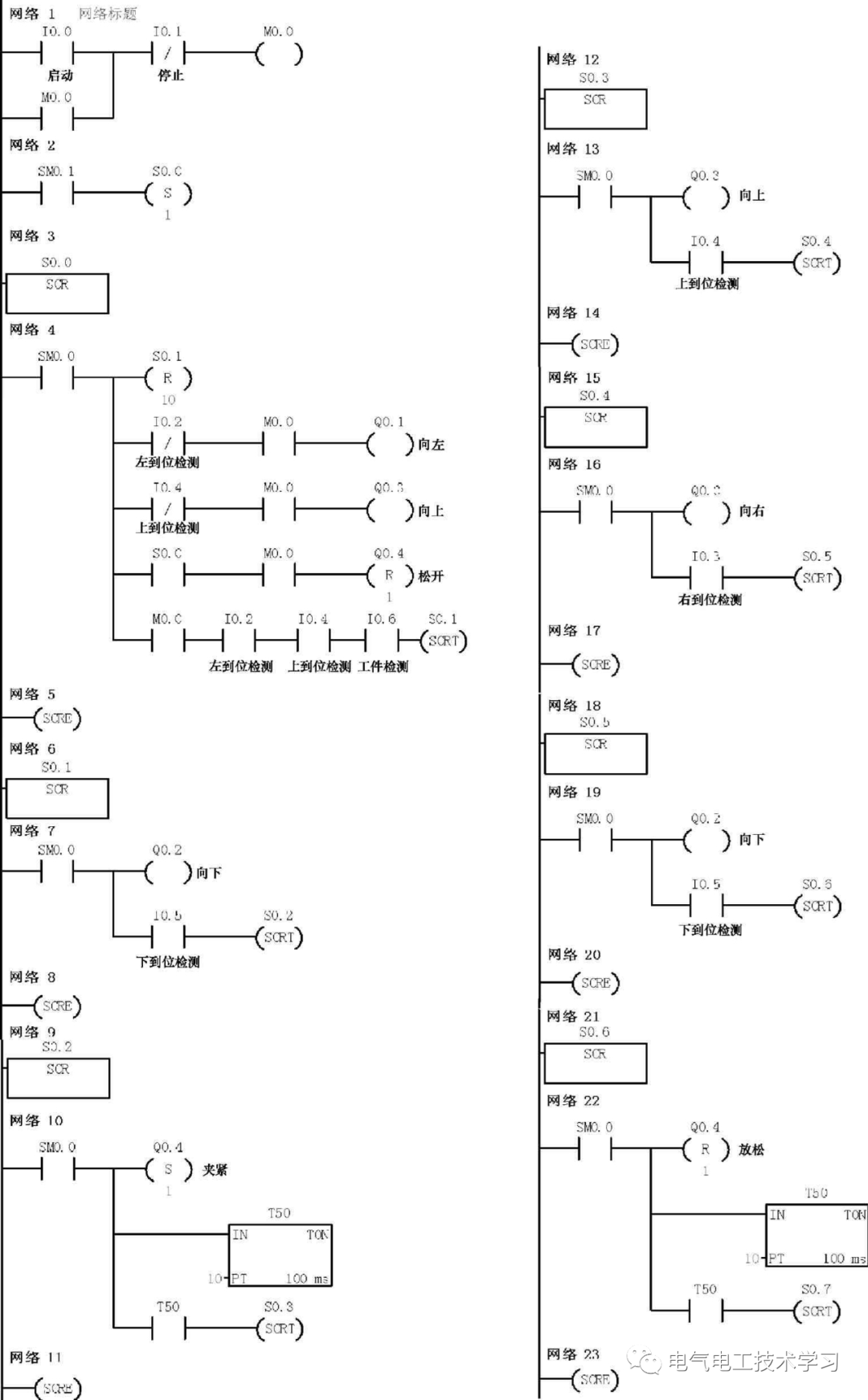
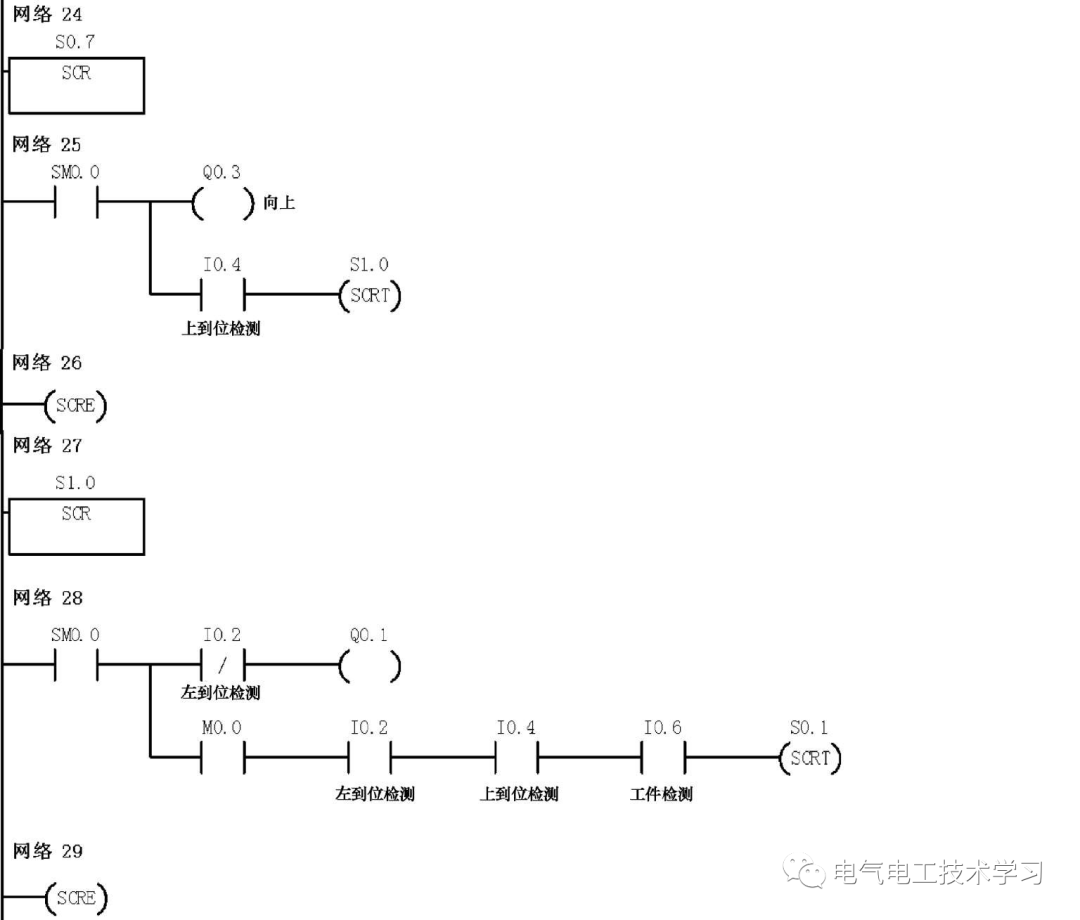
图5-12 简易机械手控制梯形图程序
下面对照图5-10所示控制线路图来说明图5-12梯形图的工作原理。
武术运动员在表演武术时,通常会在表演场地某位置站立好,然后开始进行各种武术套路表演,表演结束后会收势成表演前的站立状态。同样地,大多数机电设S备0.5在工作Q0前.2先机要械处手下于降初始位置(相当于运动员表演前的站立位置),然后在程序的控制下,机电I0.设5机备械开手下始降各到种位操作,操作结束又会回到初始位置,机电设备的初始位置也称原点。
(1)工作控制。
当PLC启动时,[2]SM0.1会接通一个扫描周期,将状态继电器S0.0 S置0.6位,S0Q.00.4程机序械段手放被松激活,成为活动步程序。
①原T1s5定0 T50 点时条到件检测。
机械手的原点条件是左到位(左限位开关SQ1 闭合)、上到位(上限位开S0.7关SQ3Q0闭.3合机)械,手即上机升械手的初始位置应在左上角。若不满足原点条件,则原点检测程序会使I0机.4机械械手手上返升回到位到原点,然后才开始工作。
[4]为原点检测程序,当按下启动按钮SB1时→[1]I0.0常开触点闭合,辅助继电器M0S1.0.0线圈Q得0.1电,机械M手0左.0移自锁触点闭合,锁定供电,同时[4]M0.0常开触点闭合,因S0.0状态I0器.4机被械手置上位升,到位故S0.0常开触点闭合,Q0.4线圈复位,接触器KM5线圈失电,机械手夹紧线I0.圈6工失作台电A而上有放工松件,[4]中的其他M0.0常开触点也均闭合。若机械手未左到位,开关SQ1断开,[4]I0.2常闭触点闭合,Q0.1线圈得电,接触器KM1线圈得电,通过电动机M1驱动机械手左移,左移到位后SQ1闭合,[4]I0.2常闭触点断开;若机械手未上到位,开关SQ3断开,[4]I0.4常闭触点闭合,Q0.3线圈得电,接触器KM4线圈得电,通过电动机M2驱动机械手上升,上升到位后SQ3闭合,[4]I0.4常闭触点断开。如果机械手左到位、上到位且工位A有工件(开关SQ5闭合),则[4]I0.2、I0.4、I0.6常开触点均闭合,执行“SCRT S0.1”指令,使S0.1程序段成为活动步程序,程序转移至S0.1程序段,开始控制机械手搬运工件。
②机械手搬运工件控制。
S0.1程序段成为活动步程序后,[7]SM0.0常ON触点闭合→Q0.2线圈得电,KM3线圈得电,通过电动机M2驱动机械手下移,当下移到位后,下到位开关SQ4闭合,[7]I0.5常开触点闭合,执行“SCRT S0.2”指令,程序转移至S0.2程序段→[10]SM0.0常ON触点闭合,Q0.4线圈被置位,接触器KM5线圈得电,夹紧线圈YV得电将工件夹紧,与此同时,定时器T50开始1s计时→1s后,[10]T50常开触点闭合,执行“SCRT S0.3”指令,程序转移至S0.3程序段→[13]SM0.0常ON触点闭合→Q0.3线圈得电,KM4线圈得电,通过电动机M2驱动机械手上移,当上移到位后,开关SQ3闭合,[13]I0.4常开触点闭合,执行“SCRT S0.4”指令,程序转移至S0.4程序段→[16]SM0.0常ON触点闭合→Q0.0线圈得电,KM1线圈得电,通过电动机M1驱动机械手右移,当右移到位后,开关SQ2闭合,[16]I0.3常开触点闭合,执行“SCRT S0.5”指令,程序转移至S0.5程序段→[19]SM0.0常ON触点闭合→Q0.2线圈得电,KM3线圈得电,通过电动机M2驱动机械手下降,当下降到位后,开关SQ4闭合,[19]I0.5常开触点闭合,执行“SCRT S0.6”指令,程序转移至S0.6程序段→[22]SM0.0常ON触点闭合→Q0.4线圈被复位,接触器KM5线圈失电,夹紧线圈YV失电将工件放下,与此同时,定时器T50开始1s计时→1s后,[22]T50常开触点闭合,执行“SCRT S0.7”指令,程序转移至S0.7程序段→[25]SM0.0常ON触点闭合→Q0.3线圈得电,KM4线圈得电,通过电动机M2驱动机械手上升,当上升到位后,开关SQ3闭合,[25]I0.4常开触点闭合,执行“SCRT S1.0”指令,程序转移至S1.0程序段→[28]SM0.0常ON触点闭合→Q0.1线圈得电,KM2线圈得电,通过电动机M1驱动机械手左移,当左移到位后,开关SQ1闭合,[28]I0.2常闭触点断开,Q0.1线圈失电,机械手停止左移,同时[28]I0.2常开触点闭合,如果上到位开关SQ3(I0.4)和工件检测开关SQ5(I0.6)均闭合,则执行“SCRT S0.1”指令,程序转移至S0.1程序段→[7]SM0.0常ON触点闭合, Q0.2线圈得电,开始下一次工件搬运。若工位A无工件,则SQ5断开,机械手会停在原点位置。
(2)停止控制。
当按下停止按钮SB2时→[1]I0.1常闭触点断开→辅助继电器M0.0线圈失电→[1]、[4]、[28]中的M0.0常开触点均断开,其中[1]M0.0常开触点断开解除M0.0线圈供电,[4]、[28]M0.0常开触点断开均会使“SCRT S0.1”指令无法执行,也就无法转移至S0.1程序段,机械手不工作。
-
plc
+关注
关注
5052文章
14813浏览量
488635 -
电动机
+关注
关注
75文章
4211浏览量
101790 -
PLC控制
+关注
关注
9文章
255浏览量
29730 -
程序
+关注
关注
117文章
3849浏览量
85472 -
机械手
+关注
关注
7文章
362浏览量
31595
原文标题:PLC经典实例:简易机械手的PLC控制线路与程序详解
文章出处:【微信号:PLC与自控设备,微信公众号:PLC与自控设备】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
械手自动化生产线项目中西门子200smart PLC通过PPI以太网模块与西门子触摸屏进行通讯案例

什么是PLC网关?如何远程控制PLC?

超越ProfiHub B5:耐达讯自动化Profibus集线器在汽车制造机械手臂控制中的实践

适配FOUP载具的晶圆搬运机械手,哪些型号维护更便捷?

经典 PLC 程序(6) - 信号防抖

CANopen 转 Modbus TCP 网关:CANopen PLC 与工控机通讯打通案例

经典 PLC 程序(5) - 闪烁灯
使用三菱FX5U PLC的经典小程序案例

PLC电机远程控制物联网解决方案






评论